
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
301 - 320 / 1,346
障害物検出装置
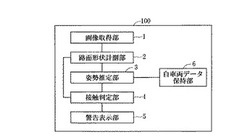
【課題】車両が障害物上を通過する際の底擦りの判定を正確に行うとともに、車体の底面以外の部分が障害物に接触するか否かの判定が可能な障害物検出装置を提供する。
【解決手段】画像取得部1と、画像取得部1で取得した画像データに基づいて路面形状を計測する路面形状計測部2と、自車両の車両データおよび路面形状に基づいて、自車両が障害物を通過する際の車両姿勢を推定する姿勢推定部3と、姿勢推定部3からの推定姿勢の情報を受けて、底擦りの判定や、底面以外の車体部分が障害物に接触するか否かの判定を行う接触判定部4と、接触判定部4からの判定結果に基づいて、警告を表示する警告表示部5と、自車両の車両データを保存する自車両データ保持部6とを備えている。
(もっと読む)
画像に含まれる目の状態を判定する画像処理装置、画像処理方法、画像処理プログラム、および、印刷装置

【課題】本発明は、精度良く目の状態を判定することが可能な画像処理装置、画像処理方法、画像処理プログラム、および、印刷装置を提供する。
【解決手段】注目画像に含まれる目の状態を判定するにあたり、前記注目画像から目領域を検出し、特徴量に基づいて目の少なくとも一部の色を変動させながら目画像を再現する目モデルを取得し、前記目モデルによって再現される目画像と前記目領域とが近似するときの前記特徴量を近似特徴量として検出し、前記近似特徴量に基づいて前記目領域の目の状態を判定する。
(もっと読む)
標識認識装置
【課題】認識した道路標識の有効範囲を正しく判定して、運転者への正確な道路標識の提示を可能とする標識認識装置を提供する。
【解決手段】標識及び補助標識が示す有効道路区間数、距離、有効時間帯、車両状態の条件等の有効範囲条件を予め格納している標識有効範囲データ記録部7と、車両前方を撮像した道路画像を用いて、標識と補助標識を認識する標識認識部2と、車両の現在位置、車種、状態等を示す車両情報を取得する車両情報取得部4と、車両周辺の地図情報を取得する地図情報取得部3と、標識有効範囲データ記録部7の有効範囲条件、車両情報及び地図情報を用いて、当該車両が、標識認識部2で認識した標識と補助標識で指定された有効範囲にいるか否かを判定する標識有効範囲判定部5を備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】対象物の検出誤差に起因する距離検出精度の劣化を十分に抑え、撮像した対象物との距離を高精度に計測する距離計測装置及び距離計測方法を提供する。
【解決手段】第1〜第3部位検出部101〜103は、対象物の撮像画像から、対象物に含まれる、サイズが既知である複数部位の部位画像を検出する。相対誤差比較部104は、部位検出部101〜103により検出された複数部位の画像サイズD1〜D3と、複数部位において既知であるサイズに関する情報とを用いて、画像サイズD1、D2、D3と画像サイズに含まれる誤差d1、d2、d3との割合である相対誤差d1/D1、d2/D2、d3/D3を最も小さくする部位画像サイズを選択する。距離推定部105は、選択された部位画像サイズを用いて対象物の距離を算出する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】OCT画像から病変部を高精度に抽出するための技術を提供することを目的とする。
【解決手段】画像処理装置であって、被検眼の断層像から網膜層境界を検出する境界抽出手段と、被検眼の眼底画像から白斑領域を抽出する白斑抽出手段と、断層像と眼底画像とを位置合わせして断層像と眼底画像との空間的対応関係を算出する位置合わせ手段と、境界抽出手段が抽出した網膜層境界と、白斑抽出手段が抽出した白斑領域と、位置合わせ手段が算出した空間的対応関係とを利用して、断層像において白斑の存在する領域を特定する特定手段と、特定手段が特定した領域について白斑が存在する確信度を計算する確信度計算手段と、確信度を用いて、特定手段が特定した領域から、断層像における白斑領域を抽出する断層像白斑抽出手段とを備える。
(もっと読む)
移動装置
【課題】病院や工場などの走行面と床面とを差別化して認識し判断することが困難な走行環境において、確実に認識したいガイドラインを正確かつ迅速に認識して所望の場所に移動できる移動装置を提供する。
【解決手段】本発明の移動装置10は、ガイドライン15の位置を含んだ地図情報を記憶する記憶部16とカメラ12により撮像した撮像画像を処理する撮像画像分析部17とを含む制御部18と、を備え、撮像画像の分析S1を行い、複数のラインを抽出するライン抽出処理S2と、ガイドライン15の撮像画像と地図情報とにおけるそれぞれの位置をマッチングさせるノイズ処理S3A、長さ処理S3Bおよび角度マッチング処理S3Cからなるラインマッチング処理S3とを行い、ガイドライン15の撮像画像と地図情報とにおけるそれぞれの位置をマッチングさせ、地図情報における動作領域の自己の位置を把握しつつ移動している。
(もっと読む)
目における瞳の位置を補正する画像処理装置、画像処理方法、画像処理プログラム、および、印刷装置
【課題】本発明は、人物画像における視線方向を良好とすることを目的とする。
【解決手段】画像処理装置であって、前記注目画像から顔領域を検出する顔領域検出部と、前記顔画像から目領域を検出する目領域検出部と、特徴量に基づいて目における瞳の位置を変動させながら目画像を再現する目モデルを取得する取得部と、前記目モデルによって再現される目画像と前記目領域とが近似するときの特徴量を近似特徴量として検出する特徴量検出部と、前記瞳の位置が理想的となる理想目画像を前記目モデルが再現するように前記近似特徴量を補正し、該補正した前記近似特徴量に基づいて前記モデルが再現する前記理想目画像によって前記目領域を補正する補正部と、を備える。
(もっと読む)
統合デプス推定
様々なインプリメンテーションが説明されている。かかるインプリメンテーションは、複数のデプスマップに対する統合デプス推定に関連している。一つの実施例において、第1の画面における位置に対する第1のビューデプスインジケータが推定され、第2の画面における対応する位置に対する第2のビューデプスインジケータが推定される。第1のビューデプスインジケータ及び第2のビューデプスインジケータの1つまたは複数の推定は、制約に基づいている。制約は、前記第1のビューデプスインジケータと前記第2のビューデプスインジケータとの関係を対応する位置に提供する。  (もっと読む)
(もっと読む)
走行車線検出装置
【課題】後視カメラの画像により現在の走行車線を検出する装置では、車線変更しても後視カメラの画像にそれが表れるのにタイムラグがあり、車線変更の検出遅れが生じるので、後視カメラの画像を利用しても検出遅れの生じない「車線変更検出装置」を得る。
【解決手段】後視カメラの撮影画像により走行車線を検出している時、車線境界線の傾斜角を測定し、車線境界線が所定以上傾斜したことを測定し検出した時、測定した傾斜角と、車速と、測定の開始時からの経過時間とにより、車両が横方向に移動した距離を演算し、この横方向移動量が所定距離以上の時には、後視カメラで車線の移動を検出しなくても、車両が車線を変更したと判断し、走行車線の表示を変更する。このとき予めデータベースから右折レーンにより車線が増加する等のデータを入力しておくと、そのタイミングで前記横移動が発生すると、走行車線が移動したものとしてより早く先読みできる。
(もっと読む)
画像処理装置及びその制御方法、コンピュータプログラム
【課題】OCT断層像において、血管などの組織や白斑や出血等の病変により減弱した層位置を高精度に検出する。
【解決手段】被検眼を断層像撮像装置により撮像して得られた断層像から網膜を構成する層候補を検出し、層候補を利用して得られる画像特徴に基づいて、断層像における偽像領域を判定し、偽像領域判定結果と画像特徴とに基づいて、偽像領域における輝度値を補正し、偽像領域内の層位置を検出しやすくなるような画像補正を行う。
(もっと読む)
対象物検知装置
【課題】監視画像に現れる対象物の像を検知する対象物検知装置において、検知精度を向上させる。
【解決手段】特徴領域抽出手段40は監視画像から対象物の特徴を有した特徴領域を抽出する。一方、画像分割手段41は、監視画像に対してセグメンテーション処理を行い、それぞれ画素値が所定の類似性を有する画素からなる複数の画像断片に監視画像を分割する。存否判定手段43は、特徴領域の内外に跨る不確定断片を検出し、不確定断片のうち特徴領域の内側にある画素数に応じて増加する内側評価値を求め、当該内側評価値を特徴領域の抽出誤差として特徴領域に対象物が存在するか否かを判定する。
(もっと読む)
混雑状況検出装置、方法、およびプログラム
【課題】カメラが撮像した画像から自動で検出することにより、客観的に混雑状況を把握することができるようにする。
【解決手段】短背景生成手段101が、移動者がフレーム中の位置が重ならないように間引きした複数フレームの撮像画像から短背景画像を生成し、背景生成手段102が、滞在者がフレーム中の位置が重ならないように間引きした複数フレームの短背景画像から背景画像を生成する。前景抽出手段104が、撮像画像と背景画像との差分から前景画像を生成し、移動者抽出手段103が、撮像画像と短背景画像との差分から移動者を抽出した移動者抽出画像を生成し、滞在者抽出手段105が、背景画像と短背景画像との差分から滞在者を抽出した滞在者抽出画像を生成する。混雑状況検出手段が、上記手段からそれぞれ入力される上記生成した画像に基づいてカメラ200が撮像する範囲の混雑状況を検出する。
(もっと読む)
テレビ制御装置
【課題】テレビの前の視聴者の顔を認識し、その結果によってきめ細かなテレビの制御を行う事が出来る様にする。
【解決手段】視聴者の顔を撮影するカメラと、前記カメラで撮影された顔を認識しテレビ制御装置までの距離を演算する演算手段と、上記演算手段による演算結果に応じてテレビを制御する制御手段と、上記演算手段の条件を設定できる条件設定手段を備え、更に望ましくは、上記演算手段が、認識した顔の大きさにより、テレビ制御装置までの距離を演算する事ができ、上記演算手段が同時に複数の視聴者を認識した場合に、テレビ制御装置もしくはテレビに一番近いと判断した視聴者の演算結果に応じて、制御手段がテレビを制御する様にする。
(もっと読む)
空間動作システムと共に用いるための空間マルチモード制御デバイス
入力デバイスを備えているシステムは、プロセッサに結合されている検出器を含む。この検出器は、入力デバイスの方位を検出する。入力デバイスは、方位に対応する多数のモード方位を有する。モード方位は、ジェスチャ制御システムの多数の入力モードに対応する。検出器は、ジェスチャ制御システムに結合されており、方位に応答して入力モードの選択を自動的に制御する。 (もっと読む)
車両監視装置、および車両監視プログラム
【課題】文字パターン領域が汚れているまたは有色系カバーを装着している車両を検出すること。
【解決手段】本車両監視手法では、文字パターンのマッチング率が低い車両101の撮影条件と、車両101の前後に通過した文字パターンのマッチング率が高い車両102,103の撮影条件とを比較する。そして、本車両監視手法では、車両101〜103の撮影条件が同一であった場合に、車両101の文字パターン領域が汚れていると判断する。これにより、画像104の文字パターンのマッチング率の低下が、急激な日照変化によるものである可能性を排除することができる。また、画像105,106の文字パターンのマッチング率はともに高いため、撮影カメラCの汚れの可能性を排除することができる。この結果、画像104の文字列のマッチング率の低下は、車両101の文字パターン領域の汚れ(あるいは、有色系カバー装着)であると判断できる。
(もっと読む)
特定の対象物品の識別のためのX線断層撮影検査システム
本明細書が開示するX線走査システムは、対象物の断層撮影X線画像を規定する走査データを生成する非回転式X線走査装置と、プログラム命令を実行するプロセッサとを備え、実行するプロセッサは、走査データを解析して、断層撮影X線画像の少なくとも1つのパラメータを抽出し、プロセッサは、対象物が液体、鋭利な対象物、薬物、紙幣、核物質、シガレット、または小火器を含むかどうかを判定するように構成される。 (もっと読む)
ディスプレイを含む携帯電子機器、及び該機器の制御方法
携帯電子機器(10)は、ディスプレイ(12)と、ユーザ位置推定部(12)と、ディスプレイ移動推定部(14)と、を含む。上記ユーザ位置推定部(12)は、ディスプレイ(12)に対するユーザ位置を推定し、上記ディスプレイ移動推定部(16)は、ディスプレイの移動を推定する。上記機器(10)は、少なくとも第1の時点で、初期ユーザ位置と呼ばれるユーザ位置を推定し(s10)、第1の時点の後の期間に、ディスプレイの移動を推定し(s22)、上記ディスプレイの移動及び上記前記初期ユーザ位置に基づいて表示コンテンツを制御する(s28)ように構成されている。また、本発明は、そのような機器(10)の制御方法及びそのコンピュータ・プログラムに関する。 (もっと読む)
画像診断支援装置及び画像診断支援方法
【課題】診断対象の胸部画像から計測された心胸比及び過去の胸部画像から計測された心胸比に基づいて、適切に心肥大の診断を支援する。
【解決手段】診断対象の胸部画像の心胸比Aが予め定められた閾値B未満であって(ステップS15;YES)、予め定められた閾値C以上である場合には(ステップS16;YES)、画像診断支援装置から画像サーバ装置に過去検査の問い合わせを行う(ステップS17)。画像診断支援装置は、画像サーバ装置からD回分の過去の心胸比計測結果を取得し(ステップS19)、これらの値を重み付け平均して過去の参照値を算出し、現在の心胸比Aと過去の参照値との差分、及び、現在の心胸比Aを加味して、判定値Fを算出する(ステップS20)。判定値Fが基準値Eより大きい場合には(ステップS21;YES)、表示部にインジケータを表示する(ステップS22)。
(もっと読む)
車載装置及び車両認識方法
【課題】周辺の車両に関する情報を取得する処理を軽減することができる車両認識方法及び車載装置を提供する。
【解決手段】運転支援装置1のCPU2は、車両に設けられた周辺監視カメラ20から周辺撮像データを取得する。また、画像プロセッサ10は、周辺撮像データ内で、隣接車線領域を設定し、隣接車線領域内に認識部分枠を設定する。さらに、画像プロセッサ10は、認識部分枠内の輝度データと、後方監視カメラ21により撮像された後方撮像データのサンプル枠内の輝度データとを比較し、路面上の物体を検出する。そして、検出物ありと判断された認識部分枠とその周辺に対し、エッジ検出を行って、他車両を認識する。
(もっと読む)
通行者計数装置、通行者計数方法および通行者計数プログラム
【課題】通行者数を正確に計測する。
【解決手段】最高点選出部によって判断対象画像TG1の最高点HMAが選出される。選出された最高点HMAから所定の高さ(例えば、高さ0の床面)まで鉛直下方に向けて所定の間隔毎に、閉領域HR1における水平面に平行なスライス画像が保持部によってそれぞれ抽出され保持される。そして、最高点HMAから所定の間隔(例えば、150mm)だけ低い位置におけるスライス画像内の判断対象画像の面積に基づいて、当該判断対象画像が通行者を示す画像であるか否かが通行者認識部により認識される。
(もっと読む)
301 - 320 / 1,346
[ Back to top ]