
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
1,221 - 1,240 / 1,346
3次元医療画像からの肺動脈樹の自動抽出の方法
例えばマルチスライスCTデータなどの3次元医療画像からの肺血管樹の自動抽出のための方法が開示される。セグメント化された肺血管は、血管の動脈らしさの程度を決定することによって動脈又は静脈のいずれかとして識別される。動脈らしさの程度は、局部気管支のセグメント化された肺血管の位置付けに対する局部気管支の位置付けの関係に基づく。血管が肺動脈と識別される場合に、それは動脈樹に加えられる。肺動脈及び気管支の半径は自動で測定され、それらの半径の比が異常値を示すところの位置は、望ましくは放射線科医による更なる評価を提案するために、表示に際して提供される。これは、例えば、肺塞栓検出にとって有用である。  (もっと読む)
(もっと読む)
自動車の前方にある障害物を検知するシステム
本発明は、自動車の前方にある障害物を検知するシステムに関する。特に、商業用自動車に適したものである。本発明のシステムは、自動車の前方領域にある第1監視領域(A1)内の動く障害物(O1)あるいは最小高さの障害物の存在を検知する第1検出サブシステムと、自動車の前方領域にある第2監視領域(A2)内の障害物(O2)の存在を検知し、前記障害物(O2)の大きさに関する情報を得る第2検出サブシステムとを有する。各サブシステムは、検出装置と、この検出装置からの入力信号を処理/解析する電子システムと、出力信号を送信する手段を有する。  (もっと読む)
(もっと読む)
不正入室検出装置および検出方法、並びにこれを利用した入室管理システム
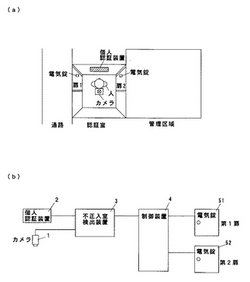
【課題】 管理区域への入室を管理するセキュリティシステムにおいて、特に、入室許可者に同伴する非許可者の不正入室を防止する不正入室検出装置および検出方法、並びにこれを利用した入室管理システムを提供する。
【解決手段】 外部からの出入を可能とする第1扉と、管理区域への出入を可能とする第2扉とによって閉鎖される認証室に個人認証装置2を設置し、当該個人認証装置2による照合結果に基づいて第2扉の開閉を制御して管理区域への不正入室を防止する入室管理システムにおいて、個人認証装置2を設置した認証室の上方(天井)に設置されたカメラ1と、当該カメラで撮影した認証室内全体の映像をもとに画像処理して認証室内の状態が「不在」「正規入室」「不正入室」の何れかを判定する不正入室検出装置3と、不正入室検出装置の判定結果と個人認証装置の照合結果とに基づいて、第1扉と第2扉の開閉を制御する制御装置4を備え、管理区域への入室を管理する入室管理システム。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム

【課題】 大サイズのメモリを必要とすることなく、濃度むらを補正できるようにする。
【解決手段】 画像処理装置10は、画像の不均一の補正位置が示されたテスト画像を画像入力装置20から取得する画像取得部11と、取得したテスト画像を記憶する画像記憶部12と、テスト画像に示された補正位置に基づいてLUTの配置位置を決定する配置位置決定部13と、決定された配置位置を記憶する配置位置記憶部14と、決定された配置位置にそれぞれ配置される変換テーブルであるLUTを生成するLUT生成部15と、生成したLUTを記憶するLUT記憶部16と、画像入力装置20から入力された画像信号をそれらのLUTを参照して変換し画像形成装置30に出力する変換部17とを備える。
(もっと読む)
検出装置、検出方法及び検出プログラム
【課題】画像中に存在する複数の大きさの被写体を、高速に検出可能とする技術を提供する。
【解決手段】検出処理にあたり、複数の大きさの物体を検出するために用いるピラミッド画像と高速検出に用いるピラミッド画像とを一部共通化したピラミッド画像MP(MP1)を作成する。具体的には、検出処理に一度利用した画像を、別の大きさの顔を検出処理する際にも再度利用できるようなピラミッド画像の構成とし、さらに、縮小率β=1/K(Kは2以上の整数)を有効に利用した方法で当該ピラミッド画像を作成する。これにより、検出処理に用いるピラミッド画像の作成総数を減らし、かつ、縮小画像作成に要する処理時間を短縮することが可能となる。
(もっと読む)
データ変換装置およびデータ変換プログラム
【課題】画像が解像度が低い出力デバイスによって出力される場合でも、その画像を表す画像データを出力用の画像データに変換する際に、その画像の持つ視覚的な印象が失われることなく反映させるデータ変換装置およびデータ変換プログラムを提供する。
【解決手段】画像を表した第1の画像データを取得する画像データ取得部と、その第1の画像データが表す画像中で用いられている線の線幅を解析する線幅解析部と、第1の画像データを、所定の解像度で画像を表した第2の画像データに変換するとともに、線幅解析部による解析によって、その解像度による限界の線幅よりも細い線幅を有する線が見つかった場合には、第2の画像データでその線が表されるときの濃度として、第1の画像データでその線が表されている濃度よりも低い濃度を付与するデータ変換部とを備える。
(もっと読む)
画像処理装置
【課題】 生体組織の内壁面下の浅い位置を通る毛細血管等を鮮明に表示する。
【解決手段】 内視鏡プロセッサ20は、参照用光源22、レーザ光源23、第1信号処理回路35a、及び映像信号処理回路36を備える。内視鏡プロセッサ20と内視鏡50とを接続することにより、撮像素子53を第1信号処理回路35aに接続する。映像信号処理回路36において、参照光を照射する時に撮像素子53が生成する参照光画像信号から参照光エッジデータを生成する。レーザ光を照射する時に撮像素子53が生成するレーザ光画像信号レーザ光エッジデータを生成する。更に映像信号処理回路36において、参照光エッジデータとレーザ光エッジデータの中でレーザ光エッジ画像にのみ表示されるエッジを抽出した部分エッジデータを生成する。
(もっと読む)
画像データ処理装置、画像データ処理方法および画像データ処理プログラム
【課題】画像データからのコードのデコードに要する処理を低減すること。
【解決手段】有効な画像コード化データを切り出す画像切り出し部201と、切り出された画像コード化データを複数のブロック(M×N)に分割するブロック分割部202と、複数のブロックのブロック濃度を抽出するブロック抽出部203と、複数のブロックにおける各平均濃度(特徴量)を抽出する平均化部204と、複数のブロックにおける各ペアブロックの平均濃度の大小関係に基づいてコード群を出力する比較部206と、コード群からデコード結果としてのコードを出力するデコード部207とを備えている。
(もっと読む)
画像データ処理装置、画像データ処理方法、画像データ処理プログラムおよび画像データ処理システム
【課題】画像データに対するコードの埋め込みやデコードに要する処理を低減すること。
【解決手段】原画像データIOを複数のブロック(M×N)に分割するブロック分割部101と、複数のブロックにおける各平均濃度(特徴量)を抽出する平均化部103と、複数のブロックにおける各ペアブロックの平均濃度の大小関係に基づいて1つのコード(コードCのうち1ビット)を対応付けて、コードC(複数のビット)を複数のブロックに埋め込むエンコード部106とを備えている。
(もっと読む)
距離画像を用いた人体検知方法および人体検知装置
【課題】距離画像を用いた人体検知方法および人体検知装置を提供する。
【解決手段】人体検知部20は、距離画像センサ10から得た距離画像を構成する複数の画素から、画素値が閾値以下となる画素領域を抽出する領域抽出処理を、閾値を画素値が最短の画素の画素値から段階的に伸ばして複数回行う。そして、人体検知部20は、領域抽出処理を行う毎に、新たに抽出された画素領域が、既に抽出された画素領域と部分的に重複する場合は、部分的に重複する複数の画素領域を同一の物体と判断して、複数の画素領域の全体に同一の識別子を割り当てる識別子割当処理を行い、同一の識別子を割り当てた複数の画素領域の画素数が人体の大きさに相当する画素数を超えるという判定条件が成立すると、領域抽出処理および識別子割当処理を終了し、同一の識別子が割り当てられた画素領域を人体として抽出する。
(もっと読む)
赤外線パターンを照射することによる対象物の三次元像の生成
概略の態様によれば、画像処理は、三次元対象物に赤外線パターンを投射することと、前記パターンを前記三次元対象物に投射している間に前記三次元対象物の第1画像、第2画像、及び第3画像を生成することとを含む。前記第1画像および前記第2画像は前記三次元対象物と前記パターンとを含んでいる。前記第1画像と前記第2画像とは、それぞれ第1カメラと第2カメラにおいて赤外線フィルタによってフィルタリングされた光を捕捉することによって生成される。前記第3画像は、前記三次元対象物は含んでいるが前記パターンは含んでいない。該画像処理はまた、前記第1画像の複数のピクセルの一部と前記第2画像の複数のピクセルの一部との第1ペア対応関係を確立することを含む。該画像処理はさらに、前記第1ペア対応関係と前記第3画像とに基づいて、前記三次元対象物の三次元構造を描く二次元画像を生成することを含む。  (もっと読む)
(もっと読む)
ロボット制御装置
【課題】自律移動可能な範囲を認識しつつ移動可能な経路を生成するロボット制御装置を提供する。
【解決手段】ロボット前方の人の移動を検知し、人の移動に合わせてロボットを移動させて経路教示データを得て、経路教示データに沿ってロボットが自律移動するとき、周囲物体検出部にて検出したロボット移動空間の天井又は壁位置や障害物の位置より、経路教示データに対するロボット移動可能範囲を算出して自律移動用移動経路を生成し、この自律移動用移動経路に従って、駆動装置の駆動によりロボットを自律移動させるように制御する。
(もっと読む)
画像中の物体の検出及び追跡
一つの開示された方法によれば、特定の物体を表す画像点の三次元空間における座標値を算定する。前記空間内のモデルを表す式を提供する。前記モデルは、一つ以上の他の物体の学習用画像のセットの特性を示す。前記画像点と前記モデルとの間の距離を算定するために前記座標値を前記式に適用する。前記算定された距離に基づいて、前記特定の物体が前記一つ以上の他の物体と一致するか否かを判定する。学習用画像セットを受け取ってもよい。前記学習用画像セットに基づいて多次元空間(例えば、固有空間)を決定してもよい。前記空間に前記学習用画像セットを投影することによって画像点のセットを生成してもよい。前記画像点セットの特性を示す前記空間内のモデルを表す式を決定してもよい。  (もっと読む)
(もっと読む)
放射線画像処理装置、放射線画像処理方法、プログラム及びコンピュータ可読媒体
【課題】放射線画像から抽出した特徴量から階調変換パラメータを定め、該パラメータに基づいて複数の放射線画像を階調変換することで、組撮影時等における複数の画像の濃度を同一にすること。
【解決手段】複数の放射線画像を階調変換する放射線画像処理装置であって、少なくとも1つの放射線画像から特徴量を抽出する特徴量抽出手段と、該特徴量抽出手段で抽出された少なくとも1つの特徴量から階調変換のためのパラメータを算出する階調変換パラメータ算出手段と、該階調変換パラメータ算出手段で算出されたパラメータを用いて複数の放射線画像を階調変換する階調変換手段とを備えることを特徴とする。
(もっと読む)
反射物体を検出する方法及び装置
物体を検出する方法は、LEDがONである間にイメージセンサによって露光画像をキャプチャするステップと、第1の画像信号のレベルを第1の基準レベルと比較することにより、イメージセンサからの露光画像信号を第1のディジタル信号にダウンサンプリングするステップと、LEDがOFFである間にイメージセンサによって暗画像をキャプチャするステップと、第2の画像信号を第2の基準レベルと比較することによってイメージセンサからの第2の画像信号を第2のディジタル信号にダウンサンプリングするステップと、露光画像と暗画像との差分画像を計算するステップと、差分画像中の明点の場所を特定することによって物体の画像を特定するステップと、を含む。
 (もっと読む)
(もっと読む)
人体検知装置
【課題】人体検知装置において、撮像した視野内に複数の人が存在する場合に、この複数の人の存在を確実に検知し、視野内における人の存否を確実に判断可能とする。
【解決手段】移動領域検出手段15が、撮像手段10により撮像された視野内における移動する人を示す領域を移動領域として検出し、領域特徴量検出手段17が、その移動領域が人に対応する領域かどうかを判定することにより、画像式人感センサ1は人の移動を検知する。領域結合手段30fは、互いに重なるか近接する移動領域同士を結合し、1つの移動領域とする。複数人判定手段30hは、このように移動領域が検出され、結合された結果、移動領域が複数存在し、これらの移動領域の間隔が所定値以上であるときに、この視野内に複数の人が存在すると判定する。そして、検知処理部30は、画像式人感センサ1の人移動の情報と、複数人判定の情報とを併せて、視野内における人の存否を判断する。
(もっと読む)
顕微鏡画像処理方法、顕微鏡画像処理プログラムおよび顕微鏡システム
【課題】 動的に挙動する標本を撮像した複数の顕微鏡画像の中から、必要な情報を含まない不要画像を簡易に特定する。
【解決手段】 時系列的に取得された複数の顕微鏡画像Gnの各画素における輝度値に基づいて、時間的に隣接する2つの顕微鏡画像Gn,Gn+1の相関係数γnを全ての顕微鏡画像Gn(n=1〜N−1)に対して順次算出し、算出された複数の相関係数γnを時系列的に配列し、各相関係数γnと所定のしきい値γsとを比較し、相関係数γnが時間的に2回連続してしきい値γsを下回っている場合に、両者の相関係数γnの算出に使用した共通の顕微鏡画像Gnを不要画像として特定する顕微鏡画像処理方法を提供する。
(もっと読む)
画像認識システム、画像認識方法及び画像処理装置
【課題】 撮像した車両の向きにかかわらず、撮像した画像データに基づいて、周囲を走行する車両の存在を認識することができる画像認識システム、画像認識方法、及び画像処理装置を提供する。
【解決手段】 撮像装置で撮像した画像データを取得して、画像認識処理を施し、処理結果に基づき出力する画像データを生成する画像処理装置を備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中に略水平方向の直線部分が存在する場合、略水平方向の直線部分が略鉛直方向の所定の間隔内に複数並んで存在するか否かを判断し、存在する場合、略水平方向の直線部分が略鉛直方向の所定の間隔内に複数並んで存在する部分にて、高輝度部分、低輝度部分、高輝度部分がこの順に存在するか否かを判断し、存在する場合、高輝度部分、低輝度部分、高輝度部分がこの順に存在する部分を含む領域を強調処理して外部へ出力する。
(もっと読む)
スポット画像検出方法及びスポット画像検出プログラム
【課題】自動車をそれぞれ表す複数のスポット画像を含む解像度が低い撮像画像から、所望の車輛占有範囲と、屋根のような特定部分の所望の存在範囲とを有する自動車を表すスポット画像を簡単な処理で検出可能にする。
【解決手段】撮像画像から、その濃度が周辺の画素の濃度に対して極大値又は極小値のうちのあらかじめ定められた一方の極値である濃度を有する少なくとも一つの極値点画素を検出する。当該検出対象物に対してあらかじめ指定された最大占有範囲内の画素から、前記検出された極値点画素の濃度に対して濃度が単調変化関係にある一群の単調変化画素を検出する。検出された極値点画素と当該極値点画素に対して検出された前記単調変化画素群とを含む極値領域が所定の条件を満たすか否かに応じて、当該極値領域が前記検出対象物に対するスポット画像を表す領域であるか否かを判定する。
(もっと読む)
画像認識システム、及び画像認識結果出力方法
【課題】 撮像した画像データにて認識された認識対象物を、実在する位置及び方向に即して表示することができる画像認識システム、及び画像認識結果出力方法を提供する。
【解決手段】 車両の外部を撮像する撮像装置と、該撮像装置で撮像した画像データを通信手段を介して取得し、画像認識処理を行い、出力する画像データを生成する画像処理装置と、該画像処理装置で生成した画像データを取得して出力する出力装置とを備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中の認識対象物を認識する手段と、認識された認識対象物の実在する位置及び方向を推定する手段とを備え、出力装置は、認識対象物が実在する位置及び方向に対応する情報を、運転時の視界の範囲内で表示する手段を備える。
(もっと読む)
1,221 - 1,240 / 1,346
[ Back to top ]