
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
1,261 - 1,280 / 1,346
画像再生装置、および画像再生プログラム

【課題】 使用者が飽きない画像のスライドショーを提供すること。
【解決手段】 CPU103は、HDD104から読み込んだ画像を個別に解析して各画像の表示効果を決定し、各画像をそれぞれ決定した表示効果に基づいて順番にモニタ105に表示して再生する。
(もっと読む)
車両用道路標示検出装置

【課題】 道路標示の検出信頼性の向上と画像処理負荷の低減
【解決手段】 自車前方を撮像した撮像画像を処理して道路上の進行方向に連続して描かれる道路標示を1文字または1記号ずつ検出するときに、道路標示の1文字または1記号が検出されるたびにその検出結果に基づいて撮像画像上の画像処理領域を絞り込み、連続して検出された文字または記号に基づいて道路標示を識別する。
(もっと読む)
画像の回転版を利用したオブジェクト検出
所定のオブジェクトを画像から検出する方法(200、300、400)は、画像において、可能性のある所定のオブジェクトを検出すること(212、314、414)を含む。この方法では、画像の少なくとも一部が回転し(214、318、422)、可能性のある所定のオブジェクトが画像の回転された少なくとも一部において検出されるかどうかについて判断される(216、320、424)。さらに、可能性のある所定のオブジェクトが画像の回転された少なくとも一部において検出されるかどうかの判断に応じて、可能性のある所定のオブジェクトが所定のオブジェクトの正確な検出であるかどうかを判断する(218、326、430)。 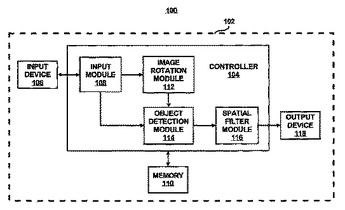 (もっと読む)
(もっと読む)
間取図画像処理方法
【課題】手描き、FAX出力、もしくは印刷された間取図原稿をイメージスキャナ等でコンピュータに読み込んで簡便に電子化する間取図画像処理方法を得る。
【解決手段】間取図画像処理方法において、コンピュータのディスプレイにおける作業領域に出力されたラスターデータに対する処理実行コマンドに応答して、ラスターデータを基準縮尺補正するステップ1と、各ピクセルを白黒2値化するステップ2と、水平方向および垂直方向にそれぞれ順次隣接して黒ピクセルが所定個数以上連続する見なし壁・柱領域ピクセルを除く他のピクセルを除去する壁・柱領域抽出するステップ3と、抽出した見なし壁・柱領域ピクセルの外縁を抽出するステップ4と、壁ポリゴン生成ステップ5と、生成した壁ポリゴンデータをディスプレイ上の部品ドラッグ&ドロップ作業領域に出力するステップ6と、シェイプ付加ステップ7とを行う。
(もっと読む)
物体検出装置
【課題】検出対象エリア内に物体が侵入しているか否かを物体形状復元手段の出力結果と、物体領域抽出手段の出力結果とを統合することで確実に検出するようにする。
【解決手段】本発明の物体検出装置は、複数のカメラによって撮影された複数の画像から視体積交差法に基づいて物体の3次元形状を復元する物体形状復元手段と、2つの画像間で検出対象エリア平面を対応づける平面変改を行って高さのある物体領域を抽出する物体領域抽出手段と、これらの二つの画像処理手段の出力結果を統合して物体の検出を行う統合検出部と、制御警報装置とで構成している。物体復元手段と物体領域抽出手段との出力結果を統合的に判断することで両手段の長所を活かして欠点を補い、屋外の気象条件や日照条件に影響されることなく、確実に物体を検出することができるようにしている。
(もっと読む)
顔情報を利用した機器制御装置
【課題】 機器に対する人の行動意思の有無を反映した機器の動作制御が可能な機器制御装置を提供する。
【解決手段】 画像情報の入力手段101と、入力された画像情報から得られる画像の中に人の顔が含まれているかどうかを判定する顔存在判定手段102と、顔存在判定手段102により画像中に人の顔があると判定されたとき、画像から当該顔の外見的な特徴情報を抽出する顔特徴抽出手段104を備え、少なくとも顔特徴抽出手段104の抽出した特徴情報に基づいて、使用者の機器106の使用に対する行動意思を判定して、機器106に対する制御を行う。
(もっと読む)
ボケた画像部分の画質を向上する方法
本発明は、画像エンハンスのための方法であって、入力画像のボケた画像部分とボケていない画像部分とを区別する第1のステップ41と、出力画像を生成するために、前記入力画像の前記ボケた画像部分のうちの少なくとも1つをエンハンスさせる第2のステップ42と、を有する方法に関する。前記ボケた画像部分及びボケていない画像部分は、例えば、ダウンスケーリングされた411入力画像の線形的なアップスケーリングされた414表現と前記入力画像との間の差異415、並びにダウンスケーリングされた入力画像の非線形的なアップスケーリングされた412表現と前記入力画像との間の差異413を比較する416ことによって区別される。前記ボケた画像部分は、例えば、該ボケた画像部分を、前記ダウンスケーリングされた入力画像の非線形的なアップスケーリングされた表現の一部分と置換する42ことによってエンハンスをされる。本発明は、装置、計算機プログラム、及び計算機プログラム製品にも関する。  (もっと読む)
(もっと読む)
画像検索方法、装置及びプログラム
【課題】プリントに適した人物撮影画像を簡単に抽出することができる画像検索方法、装置及びプログラムを提供する。
【解決手段】検索対象画像群から人物の顔が写されている画像を抽出する。抽出した画像から人物の顔領域を抽出する。抽出した顔領域の品質を検査し、基準レベルを満足する画像を検索結果の画像として出力する。
(もっと読む)
物体検出装置および物体検出方法
【課題】 検出された物体領域が、背景部分であるか、物体であるかを正確に判定することのできる物体検出装置を提供する。
【解決手段】 所定の監視領域を撮像する撮像手段101aおよび101bと、監視領域の位置を表す三次元情報を算出する三次元情報算出手段102と、物体が存在する物体領域を抽出する物体抽出手段103と、ヒストグラムを計算するためのヒストグラム計算領域を決定するヒストグラム計算領域決定手段104と、特徴画像を抽出する特徴抽出手段105と、基準の特徴画像を記憶する基準特徴記憶手段106と、ヒストグラム計算領域を複数の領域に分割する領域分割手段107と、特徴画像に基づいた特徴ヒストグラムに関するデータと、基準の特徴画像に基づいた基準特徴ヒストグラムに関するデータとの相関値を計算するヒストグラム相関計算手段108と、監視領域内に物体が存在するか否かを判定する物体判定手段109とを備える。
(もっと読む)
視覚装置の画像処理方法および画像処理装置
【課題】魚眼レンズにより得られる広い視野角の画像から必要な解像度の平面画像を得るための視覚装置の画像処理方法ならびに画像処理装置を提供する。
【解決手段】魚眼レンズを備えたカメラ(1)と、該カメラの向きの変更手段(アクチュエータ2)とを備えた視覚装置において、所定解像度の領域を設定して(ステップ1)カメラで撮像する過程(ステップ2)と、カメラで撮像した画像を所定解像度に基づく解像度の平面画像に変換する過程(ステップ3)と、平面画像における所定解像度の領域内に対象物が存在するか否かを判別する過程(ステップ6)と、所定解像度の領域内に対象物が存在しないと判定された場合に所定解像度の領域内に対象物を捉えるようにカメラの向きを変更する過程(ステップ8)とを経て画像処理が行えるようにする。
(もっと読む)
画像補正処理装置
【課題】 カメラ間の位置的な制約を要することなく複数のカメラによって撮像されて得られた画像を補正することができる画像補正処理装置を提供する。
【解決手段】 画像情報を補正する画像補正部20〜24と、補正された画像情報からオブジェクトを表すオブジェクト情報を抽出するオブジェクト抽出部25〜29と、オブジェクト情報を格納するデータベース部30と、オブジェクト抽出部25〜29によって抽出されたオブジェクト情報とデータベース部30に格納された他のオブジェクト情報とを照合するオブジェクト照合部31と、オブジェクト照合部31による照合の結果に基づいて各オブジェクト情報が表すオブジェクトが同一であるか否かを判定するオブジェクト判定部32と、同一のオブジェクトを表すと判定されたオブジェクト情報に基づいて画像補正部20〜24の画像補正パラメータを更新する画像補正パラメータ更新部33とを備える。
(もっと読む)
画像異常判定方法及び画像異常判定装置
【課題】従来より安価な構成で迅速に、しかも、極力判断ミスが極力生じないようにして、撮影画像がフロントガラスに散布状態に付着した雨滴等の付着物の画像を含んだ異常画像か否かの判定を行なう。
【解決手段】自車室内の単眼カメラ(撮像装置)2が撮影した自車1のボンネットを含む自車前方の撮影画像の微分画像を形成し、この微分画像から撮影画像のほぼボンネット前縁部に左右方向に設定した複数個の部分領域それぞれの垂直エッジ成分を探査して検出し、各部分領域毎に、垂直エッジ成分の検出個数から、撮影画像が自車1のフロントガラスに散布状態に付着した雨滴等の付着物の画像を含んだ異常画像か否かを個別判定し、その結果の多数決処理により、撮影画像が異常画像か否かを総合判定する。
(もっと読む)
個人認証装置および個人認証方法
【課題】鮮明な血管画像を取得可能で、光学系が簡素、かつ対象となる人物に労力をかけることなく個人認証を行なうこと。
【解決手段】カメラ2によって認証対象者の顔を撮影し、血管画像取得部4は、顔画像から目の位置を検出し、光軸制御部3a、ズーム制御部3b、フィルタ選択部3cを制御して白目部分を撮影する。対応点探索部7は、血管画像取得部4が取得した入力血管画像と、登録画像記憶部6に記憶した登録血管画像との対応点を探索(検索)し、補正処理部8は探索結果に基づいて入力血管画像を補正して入力補正血管画像を作成する。認証処理部9は、入力補正血管画像と登録血管画像とを照合することで認証処理を行なう。
(もっと読む)
部品認識方法及び装置
【課題】エリアセンサを使用して照明の輝度を上げずに、ノズルに吸着・保持された電子部品を移動しながら、撮像した電子部品の画像を取込んで画像認識処理し、認識ミスのない部品認識方法及び装置を提供する。
【解決手段】部品認識装置は、ノズル16に吸着・保持されたチップ部品18が、CCDカメラ29の視野内を移動中に複数回撮像して得られた画像を合成して階調差のはっきりした画像を生成して画像認識処理することにより正確な画像認識データを生成する。
(もっと読む)
生体情報による認証装置、顔画像による認証装置、生体情報による認証装置の制御方法、および、顔画像による認証装置の制御方法
【課題】 通常の運用モードとしての生体情報による認証処理モードで動作している認証装置において複数人数分の生体情報の登録を容易かつ効率的に行うことができる。
【解決手段】 通常の運用モードで動作している認証装置に対して特殊アクションを与えて複数人数分の登録処理を行う登録モードを設定し、これにより設定された登録モードにおいて、通常の運用モードと同様な手順にて顔検出処理及び顔画像の取り込みを行うことによって複数人数分の顔画像の登録を行い、設定された複数人数分の顔画像の登録が完了した際に、上記通常の運用モードへ戻るようにしたものである。
(もっと読む)
衝突判定装置、および方法
【課題】 自車両前方の物体が自車両と衝突または接触する危険性を判定すること。
【解決手段】 カメラ101で撮像された撮像画像に基づいて、制御装置103は、縦エッジ、および横エッジの抽出処理を行ってオプティカルフローを算出する。オプティカルフロー上で横方向の移動速度成分に着目して一次対象領域を設定する。そして、一次対象領域に含まれる縦方向の移動速度成分に着目して一次対象領域に含まれる対象が自車両に到達するまでのTTCを算出し、TTC時間が閾値以下である一次対象領域を監視対象領域とする。監視対象領域に含まれる横方向の移動速度成分とTTC時間とに基づいて、監視対象領域を確定する。
(もっと読む)
画像監視装置
【課題】 本発明は画像監視装置に関し、特に、光による誤報を排除しかつ強い光の中にいる侵入者を確実に抽出できる画像監視装置を提供する。
【解決手段】 本発明に係る画像監視装置は、画像を取得する画像入力手段12と、画像のエッジを抽出する特徴抽出手段15と、背景画像エッジ又は背景画像を記憶する背景記憶手段13と、入力画像エッジと背景画像エッジとを比較し各画素におけるエッジ強度の変化量を求める差分処理手段16と、背景画像エッジのエッジ強度に基づいて各画素における所定の2値化閾値を設定する2値化閾値設定手段110と、各画素におけるエッジ強度の変化量と各画素における所定の2値化閾値とを比較し該2値化閾値以上となる変化画素を抽出する変化画素抽出手段17と、少なくとも変化画素が形成する領域に基づいて監視領域における移動体の存在を判定する移動体判定手段112と、を備える。
(もっと読む)
交通流監視装置
【課題】 個別車両を認識することなく、避走車両や停止車両などを効率よく検出できる交通流監視装置を得る。
【解決手段】 所定の周期で道路状態を撮像する画像撮像部10により撮像された画像がブロック分割された各ブロック毎に物体の移動方向を物体追跡部12により追跡し、一方、画像の各ブロック毎に道路形状に応じて基本物体移動方向を予め基本物体進行方向設定部11により設定しておき、物体移動方向比較部13により、基本物体移動方向と、物体追跡手段により追跡されたブロック毎の物体の移動方向とを比較して避走ブロックを設定し、この避走ブロックを避走ブロック連結処理部14により連結し、この連結された連結避走ブロック情報から避走物体判定部15により避走物体を判定する。
(もっと読む)
表示装置、表示方法、およびプログラム
【課題】高い視認性を確保して、複数の画像を短時間で素早く表示する表示装置の提供。
【解決手段】本発明に係る表示装置は、複数の画像を高速で更新して表示する旨の指示を取得した場合に、表示すべき複数の画像を取得する画像取得部と、画像取得部によって取得された複数の画像のそれぞれの一部の領域を部分画像として切り出す切り出し部と、切り出された複数の部分画像のうち一度に表示可能な数量の部分画像を並べて合成することによって合成画像を生成し、合成画像に含まれる複数の部分画像のうちの1つの部分画像を削除すると共に、合成画像に含まれていない次の部分画像を追加することによって次の合成画像を生成する画像合成部と、合成画像を指定された更新速度で順次更新して表示する表示部とを備える。
(もっと読む)
車両用衝突時間推定装置及び車両用衝突時間推定方法
【課題】衝突時間の算出を容易にすると共に、位置検出誤差に対してロバストな出力を得ることを可能にする。
【解決手段】撮像手段2が車両周囲の画像を撮像し、エッジ抽出手段3が撮像手段2が撮像した画像の中からエッジ画像を抽出し、エッジ幅規格化手段4がエッジ抽出手段3により抽出されたエッジ画像のエッジ幅を規格化し、投票手段5が、エッジ幅規格化手段4により規格化されたエッジ画像について、エッジ画像が検出された位置に対応するカウント値を増数すると共に、エッジ画像が検出されなかった位置に対応するカウント値を初期化し、移動速度検出手段6がカウント値の傾きに基づいてエッジ抽出手段3により抽出されたエッジ画像の移動方向と移動速度を算出し、衝突時間算出手段7が、移動速度検出手段6により算出されたエッジ画像の位置及び移動速度を利用して、対象物との衝突時間を算出する。
(もっと読む)
1,261 - 1,280 / 1,346
[ Back to top ]