
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
1,281 - 1,300 / 1,346
エレベータ扉の安全装置
【課題】 画像処理において閉まる扉を異物と検出することなく、異物のみを検出可能としたエレベータ扉の安全装置を得る。
【解決手段】 エレベータの出入口を開閉するエレベータ扉1と、エレベータ扉1の敷居の上面にエレベータ扉1の開閉方向に沿って直線状または曲線状に設けられた異物検出用のマーク10と、エレベータ扉1の上方に位置して設けられ異物検出用のマーク10を含む出入口の少なくとも戸閉部を撮像する撮像手段6と、エレベータ扉1により出入口が閉じられる過程で撮像手段6が撮像した画像に示された異物検出用のマーク10から異物の存在を検出したとき異物出力信号を処理する画像処理手段7と、画像処理手段7からの異物出力信号に基づいてエレベータ扉1の閉動作を停止するよう制御する扉開閉制御手段8とを備えた。
(もっと読む)
等周ツリーを使用する画像セグメンテーション
画像セグメンテーション方法において、ツリーは入力データから得られる(310)。ツリーを表現する行列のノーフィルオーダリングが生成される(320)。連立一次方程式が行列に関して解法され、解を取得する(330)。解は一群のセグメンテーションを定義するため使用される(340)。セグメンテーションは、セグメント特性のメトリックに基づいて一群のセグメンテーションから選択される(350)。 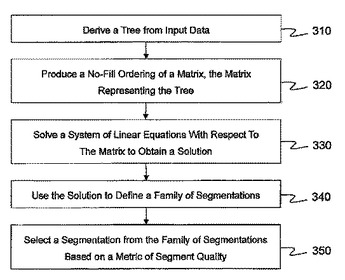 (もっと読む)
(もっと読む)
車両用衝突時間推定装置及び車両用衝突時間推定方法

【課題】衝突時間の算出を容易にすると共に、位置検出誤差に対してロバストな出力を得ることを可能にする。
【解決手段】撮像手段2が車両周囲の画像を撮像し、エッジ抽出手段3が撮像手段2が撮像した画像の中からエッジ画像を抽出し、エッジ幅規格化手段4がエッジ抽出手段3により抽出されたエッジ画像のエッジ幅を規格化し、投票手段5が、エッジ幅規格化手段4により規格化されたエッジ画像について、エッジ画像が検出された位置に対応するカウント値を増数すると共に、エッジ画像が検出されなかった位置に対応するカウント値を初期化し、移動速度検出手段6がカウント値の傾きに基づいてエッジ抽出手段3により抽出されたエッジ画像の移動方向と移動速度を算出し、衝突時間算出手段7が、移動速度検出手段6により算出されたエッジ画像の位置及び移動速度を利用して、対象物との衝突時間を算出する。
(もっと読む)
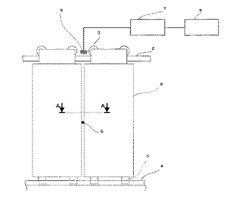
電磁波を用いた生物体に関する情報の推定方法および装置
【課題】人物等の位置、3次元姿勢、行動などの情報を推定する際に、「照明」、「気温」、「人物の着用する衣服や靴」などの影響を受けることなく、比較的精度高く推定すること。
【解決手段】生物体1に関する情報の推定において、生物体1のいる空間にミリ波からテラヘルツ領域の周波数を含む電磁波8を照射して、生物体1により反射される反射電磁波9を検出することによって生物体1の少なくとも一部位の方向と距離を含むデータを得、生物体1の少なくとも一部位の空間位置を求める。ミリ波からテラヘルツ領域の周波数を含む電磁波は、物体は透過するが生物体ではその水分等のために透過せずに一部は反射される特性を持つ。
(もっと読む)
デジタル画像で網膜血管を分析するための方法および装置
デジタル画像に基づいた網膜血管分析のための方法および装置の目的は、個々の血管のリスク、特に脳卒中のリスクを、より高い信頼性で、主観的な系統誤差および偶然誤差を少なくして決定し得るように、健常な血管状態とリスクのある血管状態を区別する能力を向上させると同時に、手動労力を低減し、時間を節約することである。乳頭を取り囲む測定ゾーンの血管部分に沿った一連の隣接血管セグメントについて血管セグメント直径、血管の種類、および画像座標が決定され、血管セグメントごとに、評価される画像に関して、時間をずらして記録される基準画像に関して、および、血管セグメントについて基準画像と評価される比較画像の間で決定される変位ベクトルに関して記憶される。比較測定は、基準画像で既に測定された同一の血管セグメントだけについて行われる。血管部分および血管の種類に対する血管セグメントの相関は、基準画像からそのまま採用される。基準画像と比較画像の血管セグメントについての記憶されたデータセットにより、測定された全ての血管セグメントについてパラメータを決定し、それらの空間分解された推移を、例えば、推移画像で表すためのベースとして、座標に関する血管セグメント直径の推移が提供される。  (もっと読む)
(もっと読む)
物体検出装置
【課題】処理負荷を軽減して効率的に障害物などの対象物体を検出することができる装置を提供する。
【解決手段】撮像画像から特徴点を検出し(ステップS102)、各特徴点の過去から現在までの特徴点データ群を記憶保持する(ステップS104)。現在の特徴点データ群において特徴量が所定値以上である特徴点を検出対象候補点とし(ステップS105)、その検出対象候補点の過去の特徴点データ群を抽出して、検出対象候補点の追跡処理を行う(ステップS106、S107)。この追跡処理の結果として求められる検出対象候補点の過去から現在までの画像位置とオプティカルフローの履歴に基づいて、障害物を検出する(ステップS109〜S113)。
(もっと読む)
画像処理装置
【課題】ヘリポートの接地帯標識のような複雑な図形から特定の形状を抽出することを可能とする。
【解決手段】画像データから対象物を検出する画像処理装置において、入力された前記画像データから対象物を抽出するための画像処理を行うフィルタを構成要素とする複数の画像処理部と、複数の画像データを統合する処理を行う第一の入力積フィルタと、を備え、前記複数の画像データは前記画像処理部により画像処理された画像データを含むことを特徴とする画像処理装置。
(もっと読む)
画像を処理する方法、装置、及び記憶媒体
【課題】色のみに依存せず、形状により赤目を検出する方法、装置及び記憶媒体を提供する。
【解決手段】画像中の顔領域を識別する工程と、前記顔領域の中の赤目領域の候補を識別する工程と、前記赤目領域の候補を少なくとも部分的に覆い、前記顔領域と同一の向きを有する幾何学的図形を選択する工程と、前記幾何学的図形の少なくとも1つの特性値を計算する工程と、前記少なくとも1つの特性値に基づいて、前記赤目領域の候補を分類する工程とから成ることを特徴とする画像処理方法を提供する。赤目は、形状に基づいて、顔画像の中でのみ検出される。検出時の速度及び精度が共に向上する。
(もっと読む)
飛び出し物体検出装置
【課題】1台のカメラの撮像画像により自車両前方に飛び出す物体を検出できる装置を提供する。
【解決手段】自車両の走行先の道路に沿って、2列のすだれ状の検出領域10〜15と判定領域20〜25を設定する。検出領域13において検出された進入者200を、その横に並べて設定された判定領域23において再び検出し、判定領域23における進入者200のオプティカルフローを算出する。このオプティカルフローと、検出領域13において算出されたオプティカルフロー201とに基づいてそれぞれ算出される進入者200の実空間上の移動速度の差が所定値以下であれば、進入者200を飛び出し物体として検出する。
(もっと読む)
物体検出装置および方法
【課題】 物体の未検知または、誤検知の発生を低減することのできる物体検出装置を提供する。
【解決手段】 ステレオカメラ101は、撮像された画像をフィードバックすることでレンズ絞りを制御できる複数の撮像装置111、112を備える。3次元情報算出部102は、ステレオカメラ101で撮像された画像から撮像空間の3次元情報を算出する。物体検出部103は、3次元情報算出部102により算出された3次元情報から撮像空間内の物体を検出する。ブルーミング判定部113、123は、ステレオカメラ101で撮像された画像からブルーミングの有無を判定する。画像加工部114、124は、ブルーミング検知部113、123の判定結果により撮像装置111、121に戻す画像を加工する。
(もっと読む)
立体物監視装置
【課題】簡単な方法で監視すべき立体物を絞り込むことが可能で、その絞込みにより計算負荷を低減することが可能な立体物監視装置および立体物監視方法を提供する。
【解決手段】立体物監視装置1は、立体物までの距離を計測する距離計測手段2と、距離計測手段により得られた立体物までの距離の分布から立体物までの距離データを求め、距離データを複数のグループに分け、各グループ毎に立体物の位置および速度を算出するグループ化手段3と、立体物のパラメータとして、立体物が周囲の立体物に対して相対的に距離計測手段側に突出している度合を数値として算出する突出度合算出手段3とを備える。
(もっと読む)
画像解析支援方法、画像解析支援プログラムおよび画像解析支援装置
蛍光画像および明視野画像または位相差画像の撮影をおこない(ステップS401)。つぎに、撮影された蛍光画像から、細胞位置を検出する(ステップS402)。つぎに、ステップS401において撮影された明視野画像または位相差画像を用いて、明視野でステップS402において位置が検出された細胞の細胞領域を求める(ステップS403)。それによって、細胞領域以外の蛍光部分を除外する(ステップS404)。そして、ステップS404によって除外されて残った細胞領域によって特定される注目細胞のクラスを判定し、それによって当該注目細胞のクラス分けをおこなう(ステップS405)。その後、上記結果に基づいて、レポートを作成する(ステップS406)。 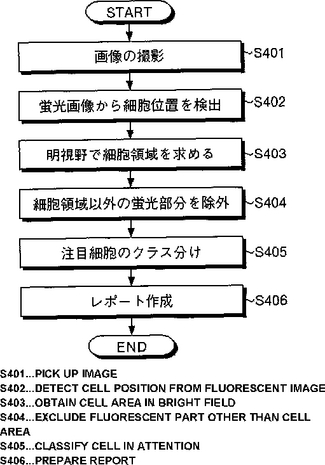 (もっと読む)
(もっと読む)
顔検出装置、顔検出方法および顔検出プログラム
【課題】入力画像中に顔領域が含まれているか否かを効率的に検出すること。
【解決手段】修正入力画像生成部501は、顔画像の特徴ベクトルとベクトル方向が異なる所定の画像ノイズを入力画像に付加して修正入力画像を生成し、顔検出部506は、生成された修正入力画像の特徴ベクトルを正規化した正規化特徴ベクトルと顔画像の特徴ベクトルを正規化した正規化特徴ベクトルのなす角度に基づいて入力画像に顔領域が存在するか否かを検出する。
(もっと読む)
顔検出
顔検出装置は、検査画像の検査領域が顔を含む尤度の指標となる出力データを生成する顔検出装置において、検査領域と、顔の存在を示す顔データとを比較し、複数の検査領域のそれぞれが異なるサイズの顔のグループを含んでいることを示す複数の各尤度を検出する比較手段と、画像に関連付けられ、一組の画像の所定の分類法の1つを定義するメタデータに応じて、顔のサイズ又は画像の分類法に適する顔のサイズの範囲に基づいて、グループ及び/又は尤度を示す値を変更する制御手段とを備える。  (もっと読む)
(もっと読む)
越波検知装置
【課題】 従来の越波検知装置では、越波以外の他の動きのある要因(車、人、自転車などの移動物体やその影、車のライトなど)が監視領域内に入ってしまうと誤検出するという課題があった。
【解決手段】 本願発明の越波検知装置は、越波の監視を行う区域の映像を撮像する撮像部と、撮像部を制御する制御部と、撮像部からの画像データを記憶するフレームメモリと、画像データから波打ち際の波の輪郭形状を抽出する波輪郭形状抽出部と、波輪郭形状抽出部で抽出された波輪郭形状の変化をもとに越波の発生を判定する越波判定部とを備え手いる。これによって、越波の判定に直接関わる波打ち際の形状を検出でき、誤検出が少なく信頼度の高い越波装置を実現することができる。
(もっと読む)
移動物体を検出するシステムとその方法
【課題】一般道路走行中の車両で取得した画像情報を処理して、前方車や追い越し車などの移動物体の検出を可能にする。
【解決手段】本発明によるシステムは、連続撮像手段A(カメラ)、画像出力手段B、背景領域識別手段C、水平エッジ検出手段Dおよび移動物体検出手段Eから構成されている。本発明による移動物体検出方法では、背景領域検出ステップを設け、オプティカルフローを用いて、前記画像データから動きの消去点を利用して背景領域を検出する。移動物体領域候補(背景でない部分)でオプティカルフローと水平エッジ検出の両方の視点から移動物体を検出する。
(もっと読む)
画像処理システム、画像処理プログラム及び画像処理方法
【課題】遮蔽物が除去され、陳列棚の様子を簡易迅速に観察可能な画像列を生成する技術の実現。
【解決手段】遮蔽物の写っていない基準画像を記憶手段に格納する処理、基準画像撮影後に同一監視対象物について所定の時間間隔で撮影された複数の元画像を蓄積する処理、基準画像の画素と最先の元画像の対応画素同士を比較し、両画素間に所定以上の差異が存在する場合に元画像側を変更部として認定する処理、元画像の変更部と非変更部を二値化した二値画像を生成する処理、変更部にラベリング処理を施し変更領域を認識する処理、変更領域の中で所定面積以下のものを除外する処理、残された変更領域の画素群を元画像から切除して基準画像における対応領域の画素群を補充し、遮蔽物を取り除いた修正画像を生成する処理、この修正画像と次の元画像とを比較し、上記と同様の処理を必要回数繰り返して修正画像列を生成する画像処理システム10。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】 対面通行道路において、停止車両検出を適切に行う。
【解決手段】 経時的に同一カメラにより同一方向を撮像した所定枚数の処理画像における各画素について、輝度情報の平均を算出することにより時間平均画像を作成する時間平均画像作成手段11と、前記時間平均画像の高輝度領域を抽出すると共に、抽出した高輝度領域と背景画像における対応領域の類似度判定を行って車両領域検出を行う車両領域検出手段12と、対面通行の車線毎及び前記車両領域毎に前記処理画像についてフレーム間差分及び2値化を行って得た結果における白画素割合が閾値を超えるか否かに基づき停止車両検出を行う停止車両検出手段13とを具備する。
(もっと読む)
半月板サイズおよび形状の決定および工夫した処置の方法
この発明は、種々の関節疾患の処置に対し療法を設計する際に半月板の大きさおよび形状を決定するための方法に関する。この発明は分析のために処理される関節のイメージを用いる。分析は、例えば、厚さのマップ、軟骨の湾曲、またはポイント群を発生することを含むことができる。この情報は、移植を含む、適した治療を設計するために、軟骨の欠陥または損傷の程度を決定する。設計された治療に対する調節は、使用される材料で決められる。  (もっと読む)
(もっと読む)
部品の画像生成方法
【課題】 部品の形態を明瞭にする部品の画像生成方法を提供する。
【解決手段】 画像生成方法は、スキャナー170により電子部品をカラーで撮像することで、その電子部品のカラー画像を生成するカラー画像生成ステップ(S101)と、そのカラー画像生成ステップ(S101)で生成されたカラー画像を、背景が白色又は黒色となって電子部品の外形が白黒の濃淡で表された部品白黒画像と、その電子部品の電極が白黒の濃淡で表された電極白黒画像に変換する変換ステップ(S102,S104)とを含む。
(もっと読む)
1,281 - 1,300 / 1,346
[ Back to top ]