
Fターム[5B057DA16]の内容
Fターム[5B057DA16]に分類される特許
1,861 - 1,880 / 4,067
画像再生装置、画像再生方法、およびプログラム

【課題】複数記憶されているデジタル画像を適切に再生表示する。
【解決手段】デジタルデータとして記憶されているデジタル画像を読み出すと、画像を解析することによって、デジタル画像の合焦度(撮影時の焦点の合い具合を表す指標)を検出した後、検出した合焦度に応じた態様で、デジタル画像の再生表示を行う。デジタル画像を再生表示する態様を決定する際には、焦点が合っているか否かが大きな影響を与えるので、デジタル画像の合焦度を検出して、検出した合焦度に応じた態様で再生表示してやれば、記憶されているデジタル画像を適切に再生表示することが可能となる。
(もっと読む)
画像処理方法、画像処理プログラム及び画像処理装置

【課題】簡単な操作で、関心部位を欠けることなく内包する関心領域を指定する画像処理方法、画像処理プログラム及び画像処理装置を提供する。
【解決手段】血管の中心軸線CL上に始点Psと終点Peを指定して血管の関心部位21aの範囲を特定する。そして、始点Psから終点Peの間にある中心軸線CLであって、投影方向Aから見て、最も手前のフロントポイントPfと最も奥のリアポイントPrを求める。つづいて、フロントポイントPfと交差する面であって投影方向Aと垂直な平面S1に対して所定の距離Lに手前方向にある面をフロント指定平面Sfとする。また、リアポイントPrと交差する面であって投影方向と垂直な平面S2に対して所定の距離Lに奥方向ある面をリア指定平面Srとする。そして、フロント指定平面Sfとリア指定平面Srの間を、関心部位21aが欠けることなく内包される関心領域Zとする。
(もっと読む)
動線編集装置,方法及びプログラム
【課題】簡単な作業により複数の動線を1本の動線に連結できるようにする。
【解決手段】監視領域を撮影したカメラ画像から検出された複数の移動体それぞれの始点から終点までの軌跡を示す動線データを記憶する動線データベースに記憶された動線データの中から、第1の動線データの選択入力を受付けるとともに、第1の動線データと連結される第2の動線データの選択入力を受付け、第1,第2の動線データが選択されると、第1の動線データの始点から第2の動線データの終点までの軌跡を示す動線データを生成する。
(もっと読む)
高解像度化する映像処理装置
【課題】超解像処理では、時間方向の解像度を用い、空間方向の解像度を補完する方式が用いられている。したがって、超解像処理では、動きがない静止した文字部分については、超解像処理では高解像度化することができない。
【解決手段】映像処理装置は、映像の時間方向の解像度を用いて空間方向の解像度を補完する映像高解像度化部と、映像に表示される文字の映像を抽出する文字抽出部と、前記文字抽出部で抽出した文字の映像を高解像度化する文字高解像度化部と、前記映像高解像度化部の出力と前記文字高解像度化部の出力とを合成する合成部とを備える。
(もっと読む)
白線検出装置および白線検出方法
【課題】車両の周囲の路面を撮像して得られた撮像画像から、路面上に描かれた白線を精度良く検出できるようにする。
【解決手段】画像変換部21が、路面の撮像画像を、路面を真上方向から見た俯瞰画像に変換し、白線候補画素検索部22が、俯瞰画像において路面に描かれた白線を示す白線候補画素を検索し、白線検出部23が、白線候補画素から近似直線を求める際に、撮像画像を俯瞰画像に変換する際に生じる誤差影響を除外するように白線候補画素の重み付けを調整し、重み付け調整後の白線候補画素から求めた近似直線に基づいて白線を検出することで、路面に描かれた白線を精度良く検出できるようにした。
(もっと読む)
フィルタ処理装置及び方法、並びに撮影装置
【課題】フィルタ処理によるリンギングの発生を抑制する。
【解決手段】注目画素Paの位置を変更しながら、注目画素Paを中心とした局所領域Lを画像内に設定し、設定した局所領域L内の画素値に基づく所定の演算処理の結果に基づき、各注目画素Paの画素値Xaの変換を行うフィルタ処理において、上記の演算処理に先立ち、局所領域L内の注目画素Pa以外の各周辺画素Pbの画素値Xbについてリミット処理を行う。局所領域L内から周辺画素Pbを順に選択し、注目画素Paの画素値Xaとの差分|Xa−Xb|を算出する。差分|Xa−Xb|が制限値Xrより大きい周辺画素Pbについては、差分|Xa−Xb|を制限値Xr(若しくは制限値Xr未満)とするように、画素値Xbの変更を行う。制限値Xrは、各周辺画素Pbに対応付け、注目画素Paから離れるに従い単調減少するように設定する。
(もっと読む)
視覚背景抽出器
本発明は、複数の関連画像の中から選択された画像内の背景を検出する方法から成る視覚背景抽出器(VIBE)に関する。上記画像セットのそれぞれの画像は複数のピクセルのセットによって形成され、撮像装置によってキャプチャされる。この背景検出方法は、上記複数の画像内の確定されたピクセル位置について、複数のアドレスを含む背景履歴を、各アドレス内にサンプルピクセル値が格納されるように構築するステップと、選択された画像内の上記確定されたピクセル位置に対応するピクセル値を、上記背景履歴と比較するステップと、選択された画像の上記ピクセル値が少なくとも所定数の上記サンプルピクセル値に実質的にマッチする場合に、上記確定されたピクセル位置を、画像背景に属するものとして分類するステップと、上記背景履歴の中のランダムに選択された1つのアドレス内のサンプルピクセル値を、選択された画像の上記ピクセル値と置き換えることによって、上記背景履歴を更新するステップとを含む。本発明の方法は特に、ビデオ監視目的、ビデオゲーム対話、及びデータプロセッサを内蔵している撮像装置に適用可能である。  (もっと読む)
(もっと読む)
画像生成装置及び方法、プログラム、並びに記録媒体
【課題】入力画像との差異が少ない高画質の投影像が映し出されるようになる位相画像を生成する。
【解決手段】画像処理装置11は、入力画像Wから複数の位相画像を生成し、入力画像Wから生成された複数の位相画像が投影面13に投影された場合にその複数の位相画像の画素が重なり合って形成される領域を画素とする重畳画像の各画素に対して、重畳画像の画素の画素値と、その画素に対応する入力画像Wの画素の画素値の差分が減少するように入力画像Wから生成された複数の位相画像の画素の画素値を変更して、投影面13に投影される複数の位相画像を生成する。本発明は、例えば、画像生成装置に適用できる。
(もっと読む)
適応ヒストグラム等化方法及び適応ヒストグラム等化装置
【課題】画像のコントラストを強調する適応ヒストグラム等化方法、適応ヒストグラム等化装置及びコンピュータプログラム製品を提供する。特に、適応ヒストグラム等化によってフェージングアーチファクト及びオブジェクト拡大アーチファクトが生じることを防止する技術を提供する。
【解決手段】適応ヒストグラム等化方法は、デジタル画像のコントラストを強調する適応ヒストグラム等化方法において、画像を画素の領域に分割し、画像において、所定の強度のローカル画素値の差分の構造を判定するステップと、各領域について、ローカル画素値の差分の判定された構造に基づいて、画素値のヒストグラムを生成するステップと、領域に対応するヒストグラムに基づいて、各領域の画素値をマッピングするステップとを有する。
(もっと読む)
自車位置認識装置及び自車位置認識プログラム
【課題】分岐点、特に狭角分岐点において分岐する複数のリンクの中から自車両が通行するリンクを精度良く判定する自車位置認識装置を提供する。
【解決手段】自車位置情報Pと道路情報M、Rとに基づいて自車両が通行するリンクを判定するリンク判定部13により判定されたリンクに基づいて、リンクの分岐点において自車両が通行した経路を示す通行履歴情報Cを生成する履歴情報生成部15を備える。自車両の周辺の画像情報Gに含まれる認識対象の画像認識処理を行う画像認識部16を備える。通行履歴情報Cは認識対象の認識結果を表す認識情報Vと関連付けられて学習データベースDB2に記憶される。学習部18は、通行履歴情報Cと認識情報Vとに基づいて、分岐点において分岐する複数のリンクの中から自車両が通行するリンクをリンク判定部13により判定する際の各リンクの優先度を示す学習優先度情報Rcを生成する。
(もっと読む)
動線編集装置,方法及びプログラム
【課題】簡単な作業により複数の動線を1本の動線に連結できるようにする。
【解決手段】動線データベースに記憶された動線データの中から、第1の動線データが選択入力されると、その動線データの終点位置を検出し、動線データ毎に、その動線データの始点位置から第1の動線データの終点位置までの距離を算出する。その結果、算出された距離が予め設定された閾値以内である動線データを第1の動線データと連結される第2の動線データの候補としてリストアップし、リストアップされた動線データの中から第2の動線データの選択入力を受付ける。かくして、第1の動線データと第2の動線データとが選択されると、第1の動線データの始点から第2の動線データの終点までの軌跡を示す動線データを生成するようにしたものである。
(もっと読む)
動線処理装置,方法及びプログラム
【課題】動線の解析に無用な動線データを排除できるようにする。
【解決手段】監視領域を撮影したカメラ画像から検出された複数の移動体それぞれの始点から終点までの軌跡を示す動線データを記憶する動線データベースと、動線データの有効、無効を判定する基準データを記憶する設定データベースとを設ける。動線データベースに記憶された動線データ毎に基準データと照らし合わせて有効、無効を判定する。無効と判定された動線データを無効化して、その後の処理で使用されないようにする。
(もっと読む)
動線表示装置,方法及びプログラム
【課題】動線の動きに同期してカメラ画像を再生表示できるようにする。
【解決手段】動線データベース31から移動体の位置座標とカメラ画像特定データとを時系列に順次取込み、移動体の位置座標を取込むと、その座標を終点座標とする移動体の動線を表示し、また、カメラ画像特定データを取込むと、そのデータで特定されるカメラ画像をカメラ画像データベース32から取得し表示する。
(もっと読む)
顔画像変形方法とこの方法を実施する顔画像変形装置
【課題】簡易な操作で、整形を望む顧客に適した整形画像を得ることができる顔画像変形方法および装置を提供する。
【解決手段】画像入力部11に顔画像が入力される。入力された顔画像から顔特徴である特徴点および特徴線が顔特徴抽出部30により抽出される。顔特徴移動量決定部31は、前記抽出された顔特徴の移動量を学習データ記憶部31aに記憶されている学習データに基づき決定する。変形顔画像作成部32は、前記顔画像における前記顔特徴を顔特徴移動量決定部31により決定された移動量に基づき移動させ、整形後の顔である変形顔画像を生成し、ユーザに提示する。
(もっと読む)
画像処理装置、撮像装置、画像処理方法およびプログラム
【課題】画像処理装置において、撮像画像信号を基に所望の物体をより確実に検出できるようにする。
【解決手段】遠赤外線カメラ11からの赤外線画像信号を基に、画素値が所定レベル以上となる第1の画像領域を抽出する白色抽出部21と、遠赤外線カメラ11と同じ方向を撮像する可視光カメラ12からの可視光画像信号を基に、少なくとも画素値が所定レベル以上となる第2の画像領域を抽出する白色抽出部22と、第1の画像領域と第2の画像領域との重複領域を抽出するAND処理部23と、赤外線画像信号のうち、上記の重複領域の各画素値を、所定の上限しきい値未満の画素値に置換する黒色置換部24と、置換後の画像信号を基に、画素値が、上記の上限しきい値以上の帯域に設定された所定のしきい値以上となる画像領域を抽出する白色抽出部25を備える。
(もっと読む)
顕微鏡、画像取得システム
【課題】バーチャルスライド画像を作成するために、視野内に収まらない大きな撮像対象を高解像度で高速に撮像することが可能な顕微鏡、及び画像取得システムを提供する。
【解決手段】対物レンズ8と、対物レンズ8の視野内に収まるように設けられた複数の二次元受光素子11からなる受光素子群9と、を有しており、試料6の観察画像は、対物レンズ8の視野内の当該試料6の領域を、試料6又は受光素子群9の位置を変更しながら複数回撮像することで取得される。
(もっと読む)
3次元形状測定システム、及び、3次元形状測定方法
【課題】被計測体が転動しているか否かに関わらず、撮影装置を短時間で容易に設定して被計測体同士W89を測定することができる3次元形状測定システム、及び、3次元形状測定方法を提供することを課題とする。
【解決手段】タイヤリム組立体13の表面に複数のマーカー12を配置する。そして、各マーカー12が配置されている領域Qに、赤、緑、青の三色の照明光を照射するとともに赤色光及び青色光の光量をタイヤ側面に沿った水平方向に変化させて照射しつつ、領域Qをビデオカメラ16、18で撮影し、ビデオカメラ16、18で撮影された画像データを演算処理することにより、ビデオカメラ16、18の設置位置を調整するとともに、光量の空間的な変化に基づく座標のマッチングを行いつつ各マーカー12の3次元座標を算出する。
(もっと読む)
画像処理装置およびこれを備える撮像システム
【課題】輝度信号の変化によりノイズが増幅される場合にも、色ノイズが強調されることを低減した色再現を可能とする画像処理装置およびこれを備える撮像システムを提供する。
【解決手段】入力された映像信号を階調変換して出力する画像処理装置であって、前記映像信号を輝度信号、色相信号、および彩度信号からなる色空間へ変換する色空間変換手段と、前記映像信号で表される画像中の領域の情報を算出する領域情報算出手段と、前記色空間変換手段によって変換された前記輝度信号に対して階調変換を行って階調変換後の輝度信号を生成する階調変換手段と、前記階調変換前後の輝度信号、および前記領域の情報に基づいて補正情報を算出する補正情報算出手段とを有し、演算した階調変換後の輝度信号に対応する彩度信号に対して前記補正情報を用いて補正を行う。
(もっと読む)
多原色変換
本方法は、入力原色RI、GI、BIの3個の値(ri、gi、bi)により定義される入力画素IPiを、表示装置DDの画素PIiのN個のサブ画素SPiを駆動するためのN個の駆動値DSiへと変換する。N個の駆動値DSiはこれら駆動値が生じる有効範囲VRを持つ。N個のサブ画素SPiは、N色の表示原色DPiにより定義される光を発し、該N色の表示原色のうち少なくとも4色が独立したものである。M色の結果の表示原色RDiが用いられ(10)、結合された表示原色CDiへと結合されたN色の表示原色DPiのうちの表示原色の群が、結合された表示原色CDiにより置き換えられる。M色の結果の表示原色RDiについての結果の駆動値DRiを得るために、入力画素IPiに対して第1の多原色変換MPC1が実行される(11)。M個の結果の駆動値DRiが有効範囲VR内の値を持つか否かがチェックされる。M色の結果の表示原色RDiの少なくとも1つの結果の駆動値DRiが有効範囲VR外の値を持つ場合には、本方法は、有効範囲VR外である結果の駆動値DRiに固定値FViを割り当て(12)、N色の表示原色DPiからK色を選択する(13)。該選択は、N色の表示原色DPiのうち、結合された表示原色CDiへと結合された表示原色であるが、有効範囲VR外である結果の駆動値DRiと関連する表示原色DPiではない表示原色を含む。整数Kは3よりも大きい。最後に本方法は、N色の表示原色DPiのうちの原色が第1の多原色変換MPC1において結合された表示原色CDiへと結合されるという制約CO2の下で、第2の多原色変換を実行する(14)。 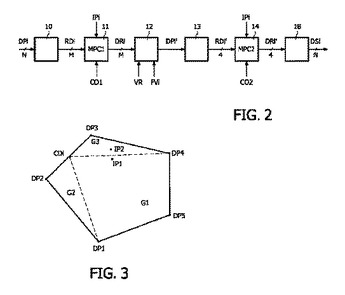 (もっと読む)
(もっと読む)
画像処理装置
【課題】布地など、テキスタイルパターンのある媒体上に画像を形成する場合に配慮した画像のシミュレーションを行うことのできる画像処理装置を提供する。
【解決手段】シミュレーションの対象となるテキスタイルパターンの画像を生成し、当該テキスタイルパターンの画像に、印刷の対象となる印刷データに基づく画像を半透明合成して出力する。これにより、テキスタイルパターンのある媒体上に画像を形成する場合に配慮した画像のシミュレーションを行う画像処理装置である。
(もっと読む)
1,861 - 1,880 / 4,067
[ Back to top ]