
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
341 - 360 / 763
ステレオ画像調整方法、ステレオ画像調整システム、及びステレオ画像調整プログラム
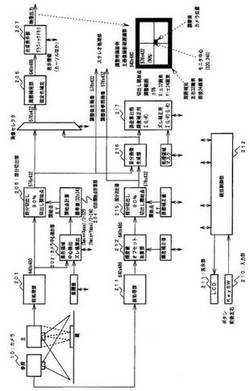
【課題】ステレオ画像を構成する画像間の誤差を倍増させることなく、ステレオ画像の正確性及び安定性を向上させることができるようにする。
【解決手段】カメラ10の主カメラは、ステレオ画像を構成する主画像を撮影する。また、カメラ10の参照カメラは、ステレオ画像を構成する参照画像を撮影する。また、差分画像生成部216は、主画像と参照画像との座標値の差を検出して差分画像を生成する。また、誤差算出部217は、差分画像に基づいて、主画像及び参照画像の座標値の補正値を算出する。そして、部分切出部205は、カメラ中心検出部202が算出したズレ値に基づいて、主画像から部分画像を抽出する。また、部分切出部215は、誤差算出部217が算出した補正値に基づいて、参照画像から部分画像を抽出する。
(もっと読む)
画像認識装置、画像認識方法および電子制御装置

【課題】認識対象の確からしい位置を検出することを課題とする。
【解決手段】探索窓で切り出される入力画像の領域について所定のパターンマッチングを実行し、当該パターンマッチングの度合いを導出する。また、探索窓で切り出される領域同士が各々いずれかの領域と一部重複するように当該探索窓を移動させながら、パターンマッチングを複数回実行させる。そして、導出された度合いを前記領域の度合いとして計上するとともに、パターンマッチングが複数回実行された結果、複数回重複してパターンマッチングが実行された領域の一部については、一回ごとのパターンマッチングで導出された度合いを前記領域の一部の度合いとして複数回分積算する。
(もっと読む)
深度データの符号化方法、深度マップ生成装置及び電子装置
【課題】取り込み画像データから深度データを計算し符号化する方法を提供する。
【解決手段】単一の画像取り込み装置により画像データの連続した2フレームを取り込む
。次いで、画像データの第1フレームおよび画像データの第2フレーム間の差異が判定さ
れる。次いで、画像データの第1フレームにおけるピクセル・データが画像データの第2
フレームにおけるピクセル・データに比較されると深度マップが計算される。次いで、深
度マップは画像データの第1フレームのヘッダに符号化される。
(もっと読む)
画像処理方法、装置およびプログラム
【課題】ステレオ相関法よって3次元計測を行う際に、画像中のテクスチャの弱い部分では対応点があいまいになり精度が落ちやすい。
【解決手段】ステレオ相関法における基準画像から作成した等輝度線画像を用いてテクスチャの強度を評価することで、ウィンドウの大きさを調節し、テクスチャの弱い部分でも安定した距離計測を可能にする。その際、テクスチャの評価手段として、等輝度線までの距離や、ウィンドウ内の等輝度線の画素数などを評価値とする。
(もっと読む)
3次元計測方法および3次元計測装置
【課題】計測対象部位が限定される場合でも、計測結果を計測対象物の全体像に対応づけてわかりやすく示した画像を表示する。
【解決手段】特定の点や領域に計測対象が限定されたワークを対象に、このワークを正面視する方向から撮像するカメラと、斜め上方から撮像するカメラとにより撮像し、各計測対象部位の高さを計測する。そして、計測処理に使用した正面視画像の各画素を、当該画像の座標系を構成するx,y軸と高さを表すz軸とによる3次元座標系に仮想配置して、透視変換を行うことにより、計測結果を表す処理結果画像を生成する。各画素のうち、高さ計測の対象とされた画素には、z座標として計測値が設定され、その他の画素のz座標はゼロ値に設定される。また、画像中の計測対象点P1´〜P4´や計測対象領域R´には、位置の識別のための+マークや高さを表す補助線が設定される。
(もっと読む)
画像処理装置、文書廃棄装置、画像形成装置及び文書管理システム
【課題】文書の片面を読み取って得られた画像情報に基づいて、当該文書の両面に形成されているパターン画像を取得できる画像処理装置、文書廃棄装置及び文書管理システムを提供する。
【解決手段】文書に記されたパターン画像を読み取って得られた画像データを、前記文書の読取面に記されたパターン画像を示す表面画像データと当該文書の読取面の裏面に記されたパターン画像を示す裏面画像データとに分離する。
(もっと読む)
形状解析プログラム及び形状解析装置
【課題】視体積交差法により生成されたボリュームデータの各ボクセルが観測対象物のどの体節部を表しているかをリアルタイム、かつ精度よく特定する。
【解決手段】入力ボリュームデータ生成部50は、カメラ11〜1mによりフレームが取得される毎に、視体積交差法を用いて基準対象物と同様の複数の体節部を有する観測対象物のボリュームデータである入力ボリュームデータを生成する。探索部60は、入力ボリュームデータ生成部50により生成された入力ボリュームデータを学習空間に投影し、入力ボリュームデータの投影点に対して最近傍に位置する基準投影点である最近傍基準投影点を学習空間内で探索する。探索部60により探索された最近傍基準投影点に対応する基準ボリュームに付されたラベルを基に、入力ボリュームデータの各ボクセルがどの体節部に属するかを特定する。
(もっと読む)
監視用カメラの補正装置
【課題】カメラ取付位置の変化に起因した画像の位置ずれを適切に補正する。
【解決手段】比較パターン算出部6は、カメラ2から出力された撮像画像上において、第1の特定部位と第2の特定部位とを抽出し、これらの抽出された第1の特定部位と第2の特定部位との位置的関係をモデル化した比較パターンを算出する。画像補正部7は、比較パターンの画像上の位置が基準パターン記憶部5から読み出された基準パターンの画像上の位置と一致するように、撮像画像のずれ補正を行う。
(もっと読む)
施設特定装置、施設特定方法及びコンピュータプログラム
【課題】複数の視線方向から乗員が注視する施設を正確に特定することが可能な施設特定装置、施設特定方法及びコンピュータプログラムを提供する。
【解決手段】異なる2以上のタイミングにおいて車両51を運転する運転者53の複数の視線方向EA,EBを車内カメラ22の撮像画像から検出し、検出された運転者53の複数の視線方向EA,EBが交差する地点から運転者の注視点Cを検出し、検出された注視点Cから所定の検索距離内に位置する施設を運転者の注視する施設として特定するように構成する。
(もっと読む)
医用画像撮影装置、医用画像処理装置および医用画像処理プログラム
【課題】乳腺がんの手術計画で使用される画像上に基準点から腫瘍範囲までの3次元距離など腫瘍範囲の正確な位置情報を表示すること。
【解決手段】乳腺がん画像表示制御部220が、腫瘍範囲を特定し、基準点から腫瘍範囲までの3次元距離を計算してVR画像上に表示するとともに、基準点からの腫瘍の方向および範囲を基準面からの角度で表示するよう構成する。また、乳腺がん画像表示制御部220は、かん流処理などで特定した腫瘍範囲をVR画像に重ねて表示する。
(もっと読む)
車載画像処理装置
【課題】自車両の運動量を算出するための画像処理を、算出する運動量の精度を保ちながら効率的に行える画像処理装置を提供する。
【解決手段】画像処理装置1は、車両の周囲を撮像する第1カメラ51と、画像の中心よりも周縁側の領域を特定領域A1,A2として抽出する特定領域抽出部12,13と、複数の特定領域内の画像情報に基づいて自車両の運動量を算出する運動量算出手段とを備えることで、撮像した画像のうち第1特定領域A1及び第2特定領域A2のみを処理対象とすることができるため、効率的に画像処理を行うことができる。
(もっと読む)
情報処理システム
【課題】画像間の座標点を高精度に対応付ける。
【解決手段】基準画像3B上で指定される指定点3Pに対応する参照画像3R上の対応点を特定する際に、指定点3Pに対応する位置を通る第1基準方向に沿った線上で探索して第1対応点候補3N1を特定し、第1対応点候補3N1を通り、かつ第1基準方向に略垂直な第2基準方向に沿った線上で探索して第2対応点候補3N2を特定し、さらに第2対応点3N2を通り、かつ第1基準方向に沿った線上で探索して第3対応点3N3を特定する。
(もっと読む)
オーディオデータ再生装置
【課題】オーディオデータ再生装置の再生の状態の切り替えを、煩わしい操作を利用者に強いることなく自動で行うこと。
【解決手段】所定の撮像領域を撮像する撮像手段と、記撮像手段が上記領域を撮像して得た画像データを順次記憶するメモリと、オーディオデータを再生する再生手段と、メモリに連続して記憶される2つの画像データを比較し、その比較の結果に応じて再生の状態を切り換える制御手段とを備えるオーディオデータ再生装置とする。
(もっと読む)
停止判断装置、ナビゲーション装置、停止判断方法、停止判断プログラムおよび記録媒体
【課題】移動体が停止したか否かを精度よく判断すること。
【解決手段】ナビゲーション装置100の停止判断部110は、自装置が搭載された移動体が停止しているか否かを判断する。撮影部111は、移動体の移動に応じて撮影画像に変化が生じる方向に向けられている。移動速度情報取得部112は、移動体の移動速度情報を取得する。判断部113は、撮影部111によって撮影された撮影画像の変化の有無に基づいて、移動体が停止しているか否かを判断する。補正量取得部121は、判断部113による判断結果に基づいて、移動体の移動状態を検出するセンサ131からの出力信号を補正するための補正量を取得する。補正部123は、補正量を用いてセンサ131からの出力信号を補正する。算出部124は、補正部123によって補正されたセンサ131からの出力信号を用いて移動体の現在位置を算出する。
(もっと読む)
情報処理装置及びその方法
【課題】外接矩形の抽出誤りに起因する埋め込み情報のズレを検出すること。
【解決手段】文書400中の各文字に、nビット(nは2以上の整数)の情報を埋め込む情報処理装置であって、文字で構成される文書400を入力する文書入力部401と、文書400に埋め込むべき埋め込み情報403を入力する埋め込み情報入力部404と、複数ビットで構成され、予め設定されたビットパターンからなる同期情報を入力する同期情報入力部405と、入力した埋め込み情報403を構成するビットと、前記同期情報を構成するビットとを合成することで、合成埋め込み情報を生成する合成部206と、合成部406で生成された合成埋め込み情報を文書入力部401で入力した文書400中の各文字に埋め込み、埋め込み後の文書409を出力する埋め込み部407及び文書出力部408を備え、埋め込み部407は、各文字に、少なくとも1ビットの同期情報を埋め込むことを特徴とする。
(もっと読む)
生体情報取得装置および生体情報取得方法
【課題】1つの光源に基づいて酸素飽和度を算出する。
【解決手段】照射部120によって照射された光を生体に透過させた画像が、撮像部130によって時系列に撮像され、撮像画像保持部141に保持される。R平均値算出部142において各時刻tの画像の赤色成分の画素の平均値R(t)が算出され、B平均値算出部143において各時刻tの画像の青色成分の画素の平均値B(t)が算出される。R極値選択部144およびB極値選択部145において、平均値R(t)およびB(t)のそれぞれについて、時系列における極大値(Rc、Bc)および極小値(Re、Be)が選択される。これら極大値および極小値に基づいて、酸素飽和度算出部147において酸素飽和度Sが算出される。
(もっと読む)
対象物の関節構造の取得方法及び装置
【課題】対象物に関する事前知識なしで、対象物の関節構造を取得する。
【解決手段】視体積交差法を用いて、複数台のカメラから得られた画像から対象物の3次元形状を取得するステップと、リーブグラフを用いて、得られた対象物の3次元形状の表面上に平均測地距離μを定義し、μの値の等高線を取得して、各等高線に基づいて関節の候補となる仮想関節を配置して対象物の仮想関節モデルを取得するステップと、対象物の異なる姿勢に基づいて取得した複数の仮想関節モデル間における対応する仮想関節を比較することで、動きの多い仮想関節を実際の関節と推定するステップと、実際の関節と推定された仮想関節以外の関節を除いて対象物の関節モデルを取得するステップと、からなる。
(もっと読む)
画像処理装置
【課題】テストパターンや期待値を予め用意する必要がなく、少ない回路規模で、任意の画像データを入力して機能検証の実施を可能にする。
【解決手段】入力された画像データのALPを算出するAPL算出回路2およびヒストグラムを解析するヒストグラム解析回路3と、入力された画像データを補正して出力画像データを生成する画像補正回路5と、CPU4とを設ける。CPU4は、通常動作時には、APL算出回路2およびヒストグラム解析回路3が抽出した特徴量を元に画像補正回路5の動作を制御する制御値を算出する。機能検証時には、入力された画像データに対してAPL算出回路2およびヒストグラム解析回路3のエミュレーションを行って特徴量の期待値を算出し、該算出した期待値とAPL算出回路2およびヒストグラム解析回路3が抽出した特徴量との比較を行う。
(もっと読む)
車両用障害物認識装置
【課題】自車に対する周辺物体の相対位置や相対速度を計測するセンサと、単眼カメラとを用いる場合にも、障害物を認識することができる車両用障害物認識装置を得る。
【解決手段】センサからの出力により、障害物を判定し、警報出力及び障害物回避を行うCPU130は、ミリ波レーダ110からの出力を演算する物体情報演算手段131と、カメラ120からの画像を取得し、画像処理する画像処理手段134と、車両の運転状態を取得する車両情報取得手段133と、少なくとも物体情報演算手段131及び車両情報取得手段133の出力に基づき、障害物を判定する障害物判定手段135と、この障害物判定手段135での判定に画像処理手段134の出力を用いるかどうかを判定する有効性判断手段138とから構成されている。
(もっと読む)
画像処理方法及び画像処理装置
【課題】モアレを低減させるとともに、モアレ低減のための処理を高速化させる。
【解決手段】画像処理部12では、指定された解像度よりも高い読み取り解像度により画像データを得て、その読み取り解像度の画像データのうち間引き方式の解像度変換処理により間引かれずに残る画素のデータのみに対して、間引き方式の解像度変換処理により間引かれる画像データも用いてフィルタ処理を行う。そして、フィルタ処理後の画像データに対して間引き方式の解像度変換処理を行った後、間引き方式の解像度変換処理がなされた画像データに対して前記指定された解像度となるようバイリニアの解像度変換処理を行う。
(もっと読む)
341 - 360 / 763
[ Back to top ]