
Fターム[5B057DA20]の内容
Fターム[5B057DA20]に分類される特許
321 - 340 / 763
車両用障害物検出装置

【課題】車両用障害物検出装置において、パターンマッチングの処理に工夫を加えることで、処理負担を減らして処理時間を短縮化する。
【解決手段】障害物検出用ステレオカメラ3(撮像手段)で撮影した車両周辺の画像から、ECU20(路面検出手段、対象領域設定手段、障害物検出手段)により、走行路面を検出し、路面から所定の高さのみを障害物検出対象領域と設定し、この障害物検出対象領域内の画像に対してパターンマッチング用データと比較することで、障害物を検出する。
(もっと読む)
画像処理装置、方法及びプログラム

【課題】動画像に適用する色変換テーブルを動的に選択して適用できるようにする。
【解決手段】隣接するフレーム間における輝度値の差分をとり、その値と閾値との比較によって入力された動画像フレームからシーンチェンジを検出するシーンチェンジ検出部101と、動画像のシーンに応じた色変換テーブルが1対1の関係で登録されており、シーンチェンジ検出部101により検出されたシーンに応じて、適応されるべき色変換テーブルを選択する色変換テーブル選択部102と、入力された動画像フレームに対して、色変換テーブル選択部102により選択された色変換テーブルを適用する色変換テーブル適用部103とを備える。
(もっと読む)
画像処理装置
【課題】画像データから前方車両を精度よく検出する画像処理装置を提供すること。
【解決手段】立体物41の位置情報を検出する位置情報検出手段28と、立体物41が撮像された撮像画像を取得する画像取得手段21と、位置情報に基づき撮像画像における立体物の探索領域を設定する探索領域設定部30と、を有する画像処理装置100において、探索領域のエッジ画像を検出するエッジ検出手段23と、エッジ画像を複数の領域に分割し、各領域のエッジの分布を検出するエッジ分布検出手段24と、各領域のエッジの分布傾向に基づき立体物以外のエッジを除去するノイズ除去部25と、を有することを特徴とする。
(もっと読む)
車両用走行路面検出装置
【課題】簡易な処理により路面を正確に検出することが出来る車両用走行路面検出装置を提供する。
【解決手段】本発明による車両用走行路面検出装置は、走行路面を撮像した路面画像から所定の広い路面領域における路面傾斜を検出する車両用走行路面検出装置であって、走行路面を撮像する第1撮像手段と、この第1撮像手段により撮像された路面画像と少なくとも1部が重複する路面画像が得られるように走行路面を撮像する第2撮像手段と、撮像された路面から、所定の領域にあるテクスチャを検出し、このテクスチャの少なくとも上下に離間した2点の位置を検出する位置検出手段と、2点の位置から、テクスチャが存在する所定の広い領域の路面の勾配を推定する路面勾配推定手段と、を有する。
(もっと読む)
速度計測方法
【課題】不動対象の周期、不動対象の動きベクトル及び移動対象の動きベクトルを実測し、それらの実測結果、不動対象の周期の規定値及び空撮画像のフレームレートを用いて移動対象の速度を計算し、移動対象の速度を少ない計算量で高精度に計測する速度計測方法を提供する。
【解決手段】白線画像の画像ピラミッドを作成した(ステップS10)後、車線境界線の周期を検出し(ステップS11)、車線境界線の動きベクトルを検出し(ステップS12)、白線除去画像の画像ピラミッドを作成し(ステップS13)、動物体画像を作成し(ステップS14)、車両の座標及び動きベクトルを検出し(ステップS15)、車両の速度を計算する(ステップS16)。
(もっと読む)
デザイン配色変換方法、デザイン配色変換装置およびデザイン配色変換プログラム
【課題】本発明は、デザインの入力に対して、色弱者に識別しづらい個所を配色し直すことで、色弱者に識別しやすい配色に変換するという処理を行うときに、その配色変換を自動的かつ高速に実行できるようにする新たな技術の提供を目的とする。
【解決手段】デザインで使われている色を色空間に配置された質点とみなして、それらの質点と、各質点を元の色空間位置につなぎとめる力と、デザイン閲覧者の認知色空間で定義される質点同士の距離に応じて定義されてその距離が近くなるほど質点に対して大きな斥力を発生する場の力とで構成される力学モデルに対して、つなぎとめる力の関数と場の力の関数とを設定することで、その力学モデルを生成して、デザインで使われている色の色空間位置を質点の座標位置の初期値として、その力学モデルの力学的に安定な解を求めて、デザインで使われている色をその安定解の指定する色空間上の色に変換する。
(もっと読む)
画像処理コントローラ用のプログラム作成装置
【課題】 作成した制御プログラムを動作確認する際の操作性を向上させた画像処理コントローラ用のプログラム作成装置を提供する。
【解決手段】 画像処理コントローラ11の制御プログラムとして、撮像トリガ信号に基づいてカメラ12からカメラ画像を取得し、取得したカメラ画像から計測結果を抽出する制御プログラムを生成するプログラム生成部25と、制御プログラムを実行するシミュレーション手段と、制御プログラムを画像処理コントローラ11へ転送する通信部26により構成される。シミュレーション手段は、登録画像として予め保持されているカメラ画像から計測結果を抽出するオフラインシミュレーション部31と、制御プログラムの実行時に画像処理コントローラ11を介してカメラ12からカメラ画像を取得し、取得したカメラ画像から計測結果を抽出するオンラインシミュレーション部32とからなる。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記憶媒体
【課題】集約印刷機能を持つ画像処理装置において、印刷内容を詳細に見ることができ、かつ見た目も良好な集約印刷を行えるようにする。
【解決手段】原稿を読み取る前にスペシャルキー65を押下すると、表示部60がコピー可能を表示する。他の通常の操作後、コピー条件を設定しスタートキー63bを押下し複数枚の原稿の読み込みを行う。全ての読み込み画像は記憶される。次にスペシャルキー65を再度押下すると、4枚のプレビュー画像が表示される。通常の第1の集約印刷の縮小率を設定すると共に、印刷内容を詳細に見るための別の縮小率による第2の集約印刷を行う画像をプレビュー画像を切り替えて選択する。条件設定完了後、スタートキー63bを押下すると、第1の集約印刷を行われると共に、第2の集約印刷が行われる。
(もっと読む)
シーン内の物体の3D姿勢を求める方法及びシステム
【課題】本発明はシーン内の物体の3D姿勢を求める方法及びシステムを提供する。
【解決手段】深度エッジが、複数の物体を含むシーン内で照明が変化している間に、当該シーンから取得された1セットの画像から求められる。輪郭を形成するために深度エッジは連結される。輪郭に従って、画像は複数の領域に分割される。それらの領域を使用して遮蔽グラフが構築される。遮蔽グラフは、シーン内の遮蔽されていない物体の遮蔽されていない領域を表すソースノードを含む。遮蔽されていない物体に関連付けられる輪郭は、物体の1セットのシルエットと比較され、当該1セットのシルエットにおいて各シルエットは既知の姿勢を有する。最良に一致するシルエットの既知の姿勢が、遮蔽されていない物体の姿勢として選択される。
(もっと読む)
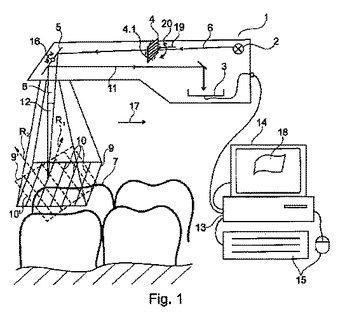
物体の三次元形状を光学的に測定する方法
本発明は、3Dデータセットを得るために被走査物体(7)上にパターン(9、9’)を投影し、投影パターン(9、9’)を画像(40、41)に記録する、三角測量法によって物体の三次元形状を光学的に測定する方法に関する。少なくとも1枚の第1の画像(40)を作成する第1の工程において、第1のパターン(9)を投影し、少なくとも1枚の別の画像(41)を作成する第2の工程において、位置または形状に関して第1のパターン(9)からずれている別のパターン(9’)を被走査物体(7)上に投影して画像(41)を作成する。第1の画像(40)と別の画像(41)は、少なくとも1つの共通点(44)を含む。前記画像(40、41)から得られた3Dデータが3Dデータセットにおける共通点(44)の3Dデータを基準にして少なくとも一致するように、少なくとも1つの共通点(44)の3Dデータに基づいて、画像(40、41)から得られた3Dデータを次の工程で合成する。
 (もっと読む)
(もっと読む)
テンプレート作成装置及び表情認識装置並びにその方法、プログラム及び記録媒体
【課題】顔向きを限定せずに正確な表情認識を行うことができるテンプレート作成装置を提供する。
【解決手段】入力された顔画像に基づいて顔の形状を近似する形状モデルを作成する形状モデル作成部121と、形状モデル作成部121が作成した形状モデル上で所定の条件を満たす複数の注目点からなる注目点群を抽出する注目点抽出部122と、複数の表情に対して、注目点抽出部122で抽出された注目点群の輝度変化のモデルを表すテンプレート11を作成する輝度分布モデル作成部123とを備えることを特徴とする。このテンプレート11を用いることで正確な表情認識を行うことができる。
(もっと読む)
画像処理装置及び画像処理方法並びにプログラム
【課題】画像処理装置において、測距精度を下げることなく、保存データのサイズを低減する。
【解決手段】被写体を2つの視点から撮像して得た2つの画像データから被写体各部までの距離を算出して立体画像データを生成する画像処理装置において、2つの画像データを入力し、入力された画像データの全ての画素を読み出し、立体画像データを保存するために設定された保存データサイズの大きさに応じた間引き率で、2つの画像データのうちの一方の画像データA1、A2を構成する画素を間引き、間引き後の画素について距離を算出する
(もっと読む)
色処理装置およびその方法
【課題】 画像の観察環境における環境光の変動を検出する。
【解決手段】 環境光パラメータ決定部207は、画像の観察環境における環境光データを取得する。環境光パラメータ記憶部208は、環境光データを記憶する。環境光パラメータ決定部207は、取得した環境光データと、環境光パラメータ記憶部208が記憶する環境光データを比較して環境光データの変動を検出する。
(もっと読む)
表情検出方法及び装置及びプログラム
【課題】ホームビデオカメラで撮影された一般のノイズ成分なども存在する動画像においても、精度良く表情を検出する。
【解決手段】本発明は、動画像を入力し、動画像から人物の顔画像を検出し、顔画像領域から鼻の先端、口角の位置を特徴点として抽出し、鼻の先端を基準とした時の、口角の左右の位置との角度を計測して特徴量とし、角度の時間変化を求め、前記時間変化から平衡状態からの立ち上がり状態、最大角度情報、平衡状態への立ち下がり状態の3状態に分割することで、笑い状態の開始から終了までの連続的な変化を捕らえられることで笑い状態を検出する。
(もっと読む)
年齢推定撮影装置及び年齢推定撮影方法
【課題】推定した年齢を被写体に通知し、通知した結果に対する被写体の変化を認識して撮影を行う。
【解決手段】画像を取得し、取得した画像から顔と存在領域を検出し、検出した顔について年齢推定を行う。また、検出した顔から性別判定を行い、検出した顔が女性である場合には、推定した年齢を若く修正する。推定した年齢を音声で通知し、音声通知前後における存在領域内の被写体の変化を検出する。被写体の変化が大きい場合には、本撮影を行う。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】ポインティングデバイスにおいて、少ない処理量で、ロバスト性の高い認識と高精度の位置検出を行う。
【解決手段】特徴点抽出部34は、撮像画像から特徴点を抽出する。計算部35は、特徴点の位置を認識する。合成部39は、特徴点の位置に基づいて、特徴点を表す特徴点ポインタを表示させる。コマンド発行部38は、特徴点の位置に基づいて、特徴点の位置または動きに対応するコマンドを発行する。本発明は、例えば、ポインティングデバイスを提供する画像処理装置に適用することができる。
(もっと読む)
画像処理装置、画像処理方法、そのプログラムおよびコンピュータ読み取り可能な記憶媒体
【課題】紙指紋情報または印刷紙面固有情報の照合に、より適した領域を紙面上から検索することが可能となる画像処理に係る技術を提供する。
【解決手段】紙面上におけるランダムな繊維の凹凸や重なりによるパターン、いわゆる紙指紋を基に、紙の原本性を保証するシステムにおいて、読み取られた紙指紋を含む画像データを複数の領域に分割する領域分割手段と、該領域分割手段により分割された各領域の全画素の階調値の分散を求める手段と、該階調値の分散を求める手段により求められた分散値から、当該領域が紙指紋情報の照合に適しているかを判定する判定手段とを有し、前記判定手段により判定された、原本保証のために、より適した領域の紙指紋情報を、その登録及び照合に用いる。
(もっと読む)
一体型の物体取り込みシステム及び表示装置並びに関連方法
表示装置の近くの物体を取り込み測定するための、一体型の物体取り込みシステム及び表示装置並びに関連方法を提供する。物体取り込みシステムは、構造化光パターンを物体の表面上に投影するための少なくとも1つの投影装置と、物体の表面上に作用する構造化光パターンの少なくとも1つの画像を取り込むための少なくとも1つの検出装置と、取り込んだ画像に関する測定を求めるためのコンピューティング装置とを含むことが可能である。表示装置は、物体に対する位置を提供して物体取り込みシステムに関して仮定することが可能である。物体取り込みシステムは、表示装置と一体化されても、その装置に取り付けられても、又はそうではなくその装置と並んで位置決めされてもよい。測定は絶えず処理可能であり、表示装置、表示装置に接続されたコンピュータ、又は表示装置に接続された任意の装置の使用のレベルを求めることが可能である。  (もっと読む)
(もっと読む)
画像処理装置、マイクロコンピュータ及び電子機器
【課題】画像の明るさ変化を検出して、明るさ変化に応じて撮像部の設定を変更可能な画像処理装置を提供すること。
【解決手段】本画像処理回路200は、撮像手段300で撮影された複数のフレームの画素単位の画像データ350を時系列に受け取り画像処理を行う画像処理装置であり、受け取った各フレームの画像データの少なくとも1部の画素の画素値又は輝度に関連する画素成分を積算して積算値を求め、積算値を所与の比較対象値と比較して、比較結果に基づき各フレームの画像の明るさ変化を検出する明るさ変化検出部210を含む。
(もっと読む)
画像認識装置、画像認識方法および電子制御装置
【課題】認識対象の確からしい位置を検出することを課題とする。
【解決手段】探索窓で切り出される入力画像の領域について所定のパターンマッチングを実行し、当該パターンマッチングの度合いを導出する。また、探索窓で切り出される領域同士が各々いずれかの領域と一部重複するように当該探索窓を移動させながら、パターンマッチングを複数回実行させる。そして、導出された度合いを前記領域の度合いとして計上するとともに、パターンマッチングが複数回実行された結果、複数回重複してパターンマッチングが実行された領域の一部については、一回ごとのパターンマッチングで導出された度合いを前記領域の一部の度合いとして複数回分積算する。
(もっと読む)
321 - 340 / 763
[ Back to top ]