
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
361 - 380 / 569
画像補正回路、画像補正方法および画像表示装置

【課題】入力画像に対してより効果的な画像補正を行うことが可能な画像補正回路を提供する。
【解決手段】Y/C分離部2が、2次元Y/C分離および3次元Y/C分離を含む所定のY/C分離を行う。また、IP変換部3が、フィールド内補間およびフィールド間補間を含む所定のIP変換を行う。動き検出回路25、切替信号生成部26および動き検出回路35がそれぞれ、Y/C分離およびIP変換の際の動画度T1〜T3をフレームごとに検出する。制御部4が検出されたこれらの動画度の大きさを考慮して、輝度補正部6における輝度補正の程度(エンハンスゲインGeおよびシャープネスゲインGs)の制御を行う。
(もっと読む)
医療用画像処理装置及び医療用画像処理方法

【課題】局所的な隆起形状を有する病変を検出する場合の検出精度を、従来に比べて向上させることのできる医療用画像処理装置及び医療用画像処理方法を提供する。
【解決手段】本発明の医療用画像処理装置は、生体組織の三次元モデルを推定する三次元モデル推定部と、隆起形状を有する病変の検出対象領域を設定する検出対象領域設定部と、検出対象領域に含まれる各ボクセルの凹凸の状態を示す形状特徴量を算出する形状特徴量算出部と、隆起形状を有する第1のボクセル及び凹型形状を有する第2のボクセルを検出する三次元形状検出部と、第1のボクセルと第2のボクセルとが互いに近接し、かつ、第1のボクセルと第2のボクセルとの間に、陥凹部位を形成するボクセル群が存在することを検出した場合、第1のボクセルの隆起形状を、病変に由来する隆起形状ではないと判別する隆起形状判別部とを有する。
(もっと読む)
中子セッティング装置および中子セッティング方法
【課題】中子および主型の位置ズレや傾きに合わせて正確に中子を主型にセットできる中子セッティング装置を提供する。
【解決手段】多関節式ロボット1のアーム2の先端の把持爪4aにより中子9を把持して主型内に納める中子セッティング装置であって、所定位置へ運ばれた中子9を撮像し得る把持爪4a付近に設けられた1台のカメラ5と、このカメラ5からの撮像情報により中子9の位置,姿勢を演算するとともに、演算結果に基づいてロボット1の作動を制御する制御装置11を備えている。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】認識対象物体の姿勢推定結果の妥当性を的確に判断することができる画像処理装置及び画像処理プログラムを提供する。
【解決手段】認識対象物体の姿勢を推定するにあたって、まず、認識対象物体の撮像画像から抽出した認識対象物体の輪郭に基づいて認識対象物体の姿勢を推定する。続いて、姿勢推定結果に基づいて認識対象物体の三次元推定形状を推定する。一方で、認識対象物体の三次元形状を検出し、認識対象物体を三次元で復元する。続いて、姿勢推定の結果に基づいて推定された三次元推定形状と、三次元検出の結果に基づいて復元された三次元復元結果とを照合することにより、姿勢推定結果の妥当性を判断する。
(もっと読む)
三次元形状推定システム及び画像生成システム
【課題】ある物体が写っている単一の二次元画像からその物体の三次元形状を推定することができる技術を提供すること。
【解決手段】複数の物体に共通の照明基底データと該照明基底データに対応する三次元形状情報を予め準備する。ある物体の二次元画像に最も類似する画像を表す照明基底データと照明基底データの重みと照明ベクトルとの組み合わせを求める。照明基底データと照明基底データの重みから定まるある物体の照明基底を偏微分して相対形状情報を求める。二次元画像と相対形状情報との間の特徴点の位置関係を求める。位置関係を利用して三次元形状情報を補正してある物体の三次元形状情報とする。
(もっと読む)
転倒検知装置、プログラム、転倒検知方法、及び転倒検知システム
【課題】人物の倒れ検知を精度良く行うことができる技術を提供する。
【解決手段】カメラで撮影された動画を構成する各フレームの画像データ(撮影画像)に対して制御部12の各処理部で種々の処理が施された後に、肩位置検出/追跡部160において、撮影画像に含まれる輪郭の近似曲線である上に凸の半円の中心位置が検出される。そして、倒れ途中検出部180によって、中心位置の垂直方向への経時的な変化を評価するための評価値(垂直変化評価値)が算出され、少なくとも当該垂直変化評価値に基づいて人物の転倒が検知される。
(もっと読む)
走行環境認識装置、自動車、及び走行環境認識方法
【課題】運転者の感覚に合った警報レベルを設定する。
【解決手段】走行環境を撮像した画像を複数のセルに分割し、分割したセルごとにフラクタル次元を算出し、算出したフラクタル次元が所定値以上となるセルの数量及び分布変化に応じて、走行環境に対する要注意度合を判断する。例えば、セルの拡大を検知したときには警報レベルを“中”に設定し、セルの数量pが変化していないときには警報レベルを“小”に設定し、セルの凝集傾向を検知したときには警報レベルを“大”に設定する。また、セルの拡散傾向を検知したときには警報を解除する。
(もっと読む)
車両乗員シート検出システム、作動装置制御システム、車両
【課題】 車両に搭載される検出システムにおいて、車両乗員シートの配置状態を精度良く検出するのに有効な技術を提供する。
【解決手段】 車両に搭載される車両乗員シート検出システム100は、カメラ112により車両乗員シートの単一視点に関する表面立体形状を検出する構成を用いて、当該車両乗員シートの各部位のうちシートバック肩部に関する情報を導出する処理を行い、導出したシートバック肩部に関する情報に基づいて、車両乗員シートの配置状態を検出する構成とされる。
(もっと読む)
適応ピクセルベースのフィルタリング
【課題】
【解決手段】
実施例において、ピクセルは、目標デジタル画像から選択される。複数の候補ピクセルは、一つ以上のデジタル画像から、複数の候補ピクセルの値に基づいて評価される。選択されたピクセルのために、対応するピクセル集合は、複数の候補ピクセルの評価、および、予め定められた閾値の数のピクセルが、対応する集合に含まれたかどうか、に基づいて、複数の候補ピクセルから決定される。更に、選択されたピクセルのための代替値が、対応するピクセル集合のピクセルの値に基づいて決定される。記載されているさまざまな実施例は、画像またはビデオのフィルム粒子またはノイズを低減するために、適応ピクセルベースの時空間的フィルタリングを提供する。実施例は、例えば、時間領域および/または空間領域に関連している定数N個のピクセルを有する各ピクセルを平均することによって、できるだけ多くの画像の細部を保存すると共に、各ピクセルで「均一な」量のノイズ除去を達成している。 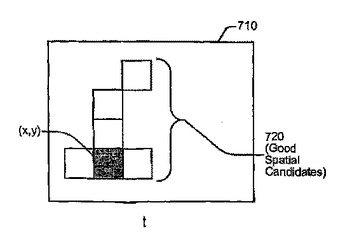 (もっと読む)
(もっと読む)
画像処理装置、画像処理方法、撮像装置および撮像方法
【課題】従来のセンサレス手ぶれ補正方式の問題点を解決し、かつ、画像の平行移動のみでなく、回転を考慮して高画質の画像を得る。
【解決手段】画面単位で順次に入力される画像について、注目画面と、当該注目画面よりも前の基準画面との間の平行移動量を算出すると共に、基準画面に対する注目画面の回転角度を算出する算出手段15を設ける。第1のメモリに格納されている注目画面を、算出手段15で算出された平行移動量だけ移動すると共に、算出手段15で算出された回転角度だけ回転させるように、第1のメモリに対する読み出しアドレスを制御することにより、第1のメモリから読み出し、読み出した画面を、基準画面または基準画面と他の画面とを重ね合わせて加算した加算処理後画面と重ね合わせて加算する回転・平行移動加算手段19を設ける。
(もっと読む)
撮像装置及びその制御方法及びプログラム及び記憶媒体
【課題】レリーズタイムラグを抑制しつつも、被写体検出機能を活用できる機能を提供する。
【解決手段】ファインダー上の複数の焦点検出エリアからいずれかの焦点検出エリアを選択する選択部124と、選択部により選択された焦点検出エリアに対応する位置に存在する被写体である目標被写体に、撮影光学系100のフォーカスを固定するフォーカスロック部123と、撮像装置の振れを検出する振れ検出部117と、振れ検出部の検出結果に基づいて、フォーカスロック部によりフォーカスを固定した時点から撮影を行なう時点までの間の目標被写体の画面上の位置ずれ量を算出し、目標被写体の画面上の位置を予測する予測部129と、撮像素子により撮影された画像から、予測部により予測された目標被写体の位置付近の画像を切り出して人物の顔を検出する顔検出部113とを具備する。
(もっと読む)
多視点画像を用いた自由視点画像生成方法、装置及びプログラム
【課題】複数のカメラの光軸に対して、被写体の表面が傾いている場合であっても、ブロックマッチングによって視差ベクトルを検出し、その視差ベクトルを用いて任意の視点の画像を生成することができる自由視点画像生成方法等を提供する。
【解決手段】複数のカメラが、光軸を平行に且つ該光軸に垂直な同一平面上に、相対的位置tで配置されている。任意点の奥行き距離Zと、被写体の表面の任意点における単位法線ベクトルnとを任意に決定し、t及びZに基づく視差ベクトルで移動させ、t、Z及びnに基づく一次変換行列で変形させて、第2の画像のブロックにマッチングさせる。Z及びnを任意に変更しながら、第1の画像の第1のブロックに最も類似する第2の画像の第2のブロックを探索する。2つのカメラを結ぶ直線上の任意の視点の内分比に応じて、任意の視点からの画像のブロックを生成する。
(もっと読む)
カメラ、画像出力装置、画像出力方法、画像記録方法、プログラム及び記録媒体
【課題】再生時に外部表示装置の画面を有効に活用できる画像記録を行うカメラ、画像を出力をする画像出力装置、画像記録方法、画像出力方法、プログラムおよび記録媒体を提供する。
【解決手段】アスペクト比が4:3のカメラ撮影画像の一部分を、外部表示装置のアスペクト比(例えば16:9)にあわせてサイズを変更して、外部表示装置に出力する。縦構図の撮影画像については、向きを90度変換した画像(A)と、この向きを変換した画像の一部分を外部表示装置の左右(23a)の空白が少なくなるように次第にアスペクト比を変更して画像((B)、(C))を、一定時間間隔で順次外部表示装置に出力する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】文字領域か否かをより精確に判別して画像ファイルを圧縮する画像処理装置を提供する。
【解決手段】矩形領域のサイズが小さければ(S504:YES)、テキスト領域とする(S511)。下地率が66%以上であって(S506:YES)、ラベリング率が67%未満で、かつ、周辺長率が50%以上ならば(S513:YES)、大文字領域とする(S515)。さもなければ(S513:NO)、下地領域とする(S514)。直線数が10本以上か(S508:YES)、4本以上かつラベリング率が12%以下であって(S509:YES)、エッジ率が5%以上ならば(S517:YES)、表領域とする(S519)。さもなければ(S516:NO)、グラフ領域とする(S518)。直線数が4本未満か、ラベリング率が12%よりも大きければ(S509:NO)、写真領域とする(S510)。
(もっと読む)
臨床医駆動の例示ベースのコンピュータ支援診断
例示ベースのコンピュータ支援診断(CADx)の最適化は、データベース120における関心ボリュームVOI116を類似性の主観的評価に従ってそれぞれのクラスタにクラスタ化すること(S220)により達成される。それから、最適なセットの関心ボリュームVOI特徴は、主観ベースのクラスタリングを確かめるため、選択された特徴に基づいて類似性の客観的評価が、特徴空間においてデータベースVOIをクラスタリングするように、例をフェッチングするために選択される(S230)。フェッチングされた例は、臨床医による比較のため、診断されるVOIとともに表示される。好ましくは、表示される例は、予後、治療情報、フォローアップ情報、現在の状態、及び/又は電子カルテから取って来られる臨床情報を更に表示するため、ユーザが選択可能である(S260)。 (もっと読む)
端子リード検査方法
【課題】特殊な光拡散部材の如きものを用意することなく、しかも端子リードの先端の異常な屈曲、或いはそこへの異物の付着などがあった場合においても、端子リードの平坦度並びにプリント基板とのクリアランスを正確に検査し得る端子リード検査方法を提供する。
【解決手段】ワークWを水平方向に移動させ、その前後の状態を1台のカメラCで撮像し、もって同移動の前後における計測点pmnと該カメラとの3点を結ぶ3角形をベースにカメラCから計測点間の垂直距離Hnを算出する単眼ステレオ計測法を成立させると共に、上記計測点を複数設定し、該計測点相互の上記距離又は同計測点相互の高さhnを比較し、若しくは規格値Stとそれらを比較し、ワークWの平坦度、曲がり、捻れなどを検査・判定する。
(もっと読む)
画像処理装置及びその処理方法
【課題】時系列的に変化する撮影画像から、撮影装置の撮影位置、姿勢又は対象物の座標を精度良く計測でき、また、高速、小メモリ容量の超解像処理を可能とする。
【解決手段】時系列的に撮影した一連の撮影画像を取得し、撮影画像から特徴点を抽出し、特徴点を追跡して相互に対応付け、対応付けられた一連の撮影画像から、超解像処理を行なうための画像群である原画像群を隣接画像間の画面上での特徴点の移動距離が略等しくなるように選択し、原画像群において対応付けられた特徴点から超解像処理を行なうための特徴点としての主特徴点を抽出して、主特徴点の周囲の小領域に部分画像を設定し、部分画像に超解像処理を行ない部分的超解像画像を形成し、部分的超解像画像が形成された撮影画像群からステレオ画像を選択し、標定および三次元計測を行なう。
(もっと読む)
画像処理装置及びその処理方法
【課題】時系列的に変化する撮影画像から、撮影装置の撮影位置、姿勢又は対象物の座標を精度良く計測でき、また、高速、小メモリ容量の超解像処理を可能とする。
【解決手段】時系列的に撮影した一連の撮影画像を取得し、撮影画像から特徴点を抽出し、特徴点を追跡して相互に対応付け、対応付けられた一連の撮影画像から、超解像処理を行なうための画像群である原画像群を選択し、原画像群において対応付けられた特徴点から超解像処理を行なうための特徴点としての主特徴点を抽出して、主特徴点の周囲の小領域に部分画像を設定し、部分画像に超解像処理を行ない部分的超解像画像を形成し、部分的超解像画像が形成された撮影画像群から基線長が所定の閾値より長くなるようにステレオ画像を選択し、標定および三次元計測を行なう。
(もっと読む)
顔照合装置および方法並びにプログラム
【課題】顔画像に基づく顔照合において、照合可能な顔の表情や向きの対応範囲の拡大と照合精度の向上を同時に図る。
【解決手段】特定の人物の顔を表す特定顔画像について、第1の学習用顔画像群、例えば、無表情正面顔だけの顔画像群を分析して決められた、顔の固体判別が可能な第1の特徴量グループの特徴量と、第2の学習用顔画像群、例えば、表情・向きに変化のある顔からなる顔画像群を分析して決められた、顔の固体判別が可能な第2の特徴量グループの特徴量とを算出して記憶しておく。入力された被照合顔画像について、同様に各グループの特徴量を算出する。被照合顔画像と特定顔画像との間で、各グループの特徴量同士を比較して、それぞれ類似度を算出し、これら類似度を総合的に利用して両顔画像の照合判定を行う。
(もっと読む)
深さ重み付けされたカラライゼーションを使用するボリュームレンダリング方法及び装置
ボリュームレンダリングの方法は、1又は複数の解剖学的構造の第1の合成された面を表すデータを得(52)、第1の合成された面の関数として第2の合成された面のデータを計算する(54)ことを含む。第2の合成された面のデータは、個々のレイキャストラインに沿った1又は複数の解剖学的構造の深さ尺度を示す。方法は更に、第2の合成された面の深さ尺度の関数として、2つの異なるカラライゼーションパレット間で深さ重み付けされたカラー値を決定する(56)ことを含む。決定された深さ重み付けされたカラー値は、深さ重み付けされたカラライゼーションを用いてボリュームレンダリング画像を生成するために、第1の合成された面に適用される(58)。  (もっと読む)
(もっと読む)
361 - 380 / 569
[ Back to top ]