
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
281 - 300 / 569
パノラマ画像生成装置およびプログラム

【課題】 コンピュータに負荷をかけず、少ないメモリ容量で2次元的に広がりをもった自然なパノラマ画像を生成すること。
【解決手段】 撮像手段によって取得された入力画像の輝度画像を作成する輝度画像生成手段と、輝度画像の動きを計算するための基準画像を保存する手段と、新たに取得された入力画像の輝度画像と基準画像間の動きデータを算出する動きデータ演算手段と、算出された動きデータを用いて入力画像を重ね合わせてパノラマ画像を合成する画像合成手段と、新たに取得された入力画像の輝度画像と基準画像との動きデータに基づいて、当該画像間のずれが所定値以上か否かを判定し、所定値以上の場合は、当該輝度画像を新たな基準画像として設定する基準画像設定手段とを備える。
(もっと読む)
分類装置

【課題】少ない教師サンプルを用いて抽出程度の変化に対する分類性能のロバスト性を確保すること。
【解決手段】画像より欠陥領域を抽出する欠陥領域抽出手段101と、前記欠陥領域が抽出されるべき正解カテゴリを入力する操作手段104と、正解カテゴリが入力された領域に対し、新たな抽出パラメータを設定する抽出パラメータ設定手段108と、前記新たな抽出パラメータを基に欠陥領域を再抽出する欠陥領域抽出手段101と、再抽出結果を基に前記欠陥領域に対して抽出程度が異なる複数の教師データを作成する教師データ作成手段105と、前記教師データを基に分類を行う分類手段107と、を備える。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、三次元形状計測プログラム、および記録媒体
【課題】迅速かつ高精度に三次元形状情報を計測できる三次形状元計測装置を実現する。
【解決手段】位置に応じて周期的に輝度が変化する光パタンを、計測対象12が計測される搬送ステージ52上の一部の領域へ投影する投光部20と、光パタン照射領域14を撮像する第1のラインセンサ36と、光パタン非照射領域16を撮像する第2のラインセンサ38と、第1のラインセンサ36が撮像した画像82および第2のラインセンサ38が撮像した画像84から、背景情報を除去した画像86に含まれるある画素における光パタンの位相を、画像86における画素とその周辺の画素との輝度値に基づいて算出し、算出した位相に基づいて計測対象12の高さ情報を算出する画像解析・駆動制御部40とを備え、第1のラインセンサ36および第2のラインセンサ38は、それぞれ、光パタン照射領域14および光パタン非照射領域16を、同時に撮像できるように配置されている。
(もっと読む)
画像処理装置及び、画像処理方法
【課題】 簡単な装置で、等身大印刷を行なう。
【解決手段】 画像を撮影する撮影部と、前記撮影部で撮影を行なう際に、被写体と共に撮影される2つ以上の基準物と、前記撮影部により撮影された画像より、前記基準物を抽出する画像抽出部と、抽出された複数の前記、基準物の画像内の距離を測定する測定部と、印刷時の拡大縮小率を計算する計算部と、前記、画像抽出部より、抽出された基準物を除去する除去部と、前記、除去部で基準物の除去された画像を印刷する印刷部より構成される。
(もっと読む)
ノイズ低減装置およびノイズ低減方法
【課題】動画像のノイズ低減処理において空間的平滑化にともなう画質の低下を抑制する。
【解決手段】動画像のノイズを低減するノイズ低減装置400は、動画像中で動きのある動領域と動領域以外の静領域とを検出する動き検出部412と、動画像を構成する入力フレーム画像F0に空間的平滑化処理を施して空間平滑フレーム画像を生成する空間平滑化処理部と、を備えている。空間平滑化処理部による空間的平滑化処理の度合は、入力フレーム画像F0を構成する画素毎に設定可能である。そして、静領域に属する画素における空間的平滑化処理の度合は、動領域に属する画素における空間的平滑化処理の度合よりも高くなるように設定される。
(もっと読む)
眼底検査画像解析システム、及び眼底検査画像解析プログラム
【課題】複数の眼底検査画像を比較考量し、経時的変化を数値化し、視覚を通じて変化量を把握可能な眼底検査画像解析システムの提供を課題とする。
【解決手段】各種データ等を記憶するデータ記憶手段18、第一眼底検査データ15等を利用して深さ情報20等を算出する情報データ取得手段21,23、仮想線分11を設定する仮想線分設定手段24、第一深さプロファイル曲線7等を算出する深さプロファイル曲線算出手段25,26、二つの深さプロファイル曲線7,8を重ね合わせる曲線重合手段27、深さプロファイル曲線7,8に基づいて経時的変化を数値化した変化量データ19を算出する変化量算出手段28、変化量マップ9を作成する変化量マップ作成手段29、作成された変化量マップ9を眼底画像6に合成する合成マップ10を表示する合成マップ表示手段31を含む変化量マップ表示手段32として機能するコンピュータ3を含む。
(もっと読む)
画像合成装置、画像合成方法及び画像合成プログラム
【課題】人物と背景を動画像に合成する装置を提供する。
【解決手段】人物実動画像入力・記憶手段、背景実動画像入力・記憶手段、光環境実動画像入力・記憶手段、人物の顔の表面反射特性情報入力・記憶手段、人物画像抽出手段、人物および顔の三次元形状情報に基づいて顔の追跡情報を求める追跡処理手段、背景の実動画像に応じた光環境情報を求める光環境情報処理手段、顔の陰影情報及び顔の表面反射情報を求める合成顔画像情報処理手段、顔画像から肌情報を求める肌情報処理手段、肌情報と顔の陰影情報と顔の表面反射情報に基づき顔の合成画像を合成する顔画像合成処理手段、顔の合成画像と人物画像及び背景の実動画像に基づいて人物背景合成動画像を合成する人物背景動画像合成処理手段とを具備する。
(もっと読む)
深さ関連情報伝達のための方法及び装置
本発明は、第1の画像820と関連した第1の深さマップ810から第2の画像830と関連した第2の深さマップ860へと深さ関連情報を伝達するための装置及び方法に関し、第1及び第2の画像は、画像シーケンス中で時間的に隣接する画像である。本方法は、第1の画像820及び第2の画像830のピクセルを用いて、第1の深さマップ810から中間の深さマップ840へと深さ値を伝達することによって第2の画像830と関連した中間の深さマップ840を生成し、第1の深さマップ810中の第1の位置周辺の空間領域の深さ値及び中間の深さマップ840中の第2の位置周辺の空間領域の深さ値を含む情報を用いて動きベクトル850を生成し、動きベクトル850及び第1の深さマップ810を含む情報を用いて第2の深さマップ860中の第2の位置の深さ値を生成する。  (もっと読む)
(もっと読む)
不審者通報装置、不審者監視装置及びこれを用いた遠隔監視システム
【課題】不審者の検知を正確に行って動画像データを送信する。
【解決手段】監視センサ部11がセンサ検知に従って出力する監視センサ信号及び撮像部12がモーション検知に従って出力するモーション信号を取得し、監視センサ信号及びモーション信号が時間軸上重複している場合に不審者検知信号を出力する不審者検知部101、不審者検知状態を示したデータを送信する不審者検知データ通信部102、撮像部12が撮影した不審者監視場所の動画像データを送信する画像通信部103を備える不審者通報装置10であり、不審者検知データ通信部102は、再度の不審者検知データの送信要求に従って再度の不審者検知データを送信し、画像通信部103は、再度の不審者検知データの判定に基づいた動画像データの送信要求に従って動画像データを送信する。
(もっと読む)
画像データ表示システム、画像データ出力装置、画像データ表示方法、及びプログラム
【課題】立体物の画像を2次元のディスプレイを用いて実物大表示する際、実物の大きさとなっている部分を明示すること。
【解決手段】画像データ表示システムにおいて、立体物の平面投影画像を含む物体画像の表示サイズを取得する表示関連情報取得部22と、上記表示サイズで上記物体画像を表示した場合に、該物体画像内に表示される上記平面投影画像中の2つの位置であって、その間の長さが実物大長さとなる両位置を示す指示画像データを取得する出力用画像データ生成部30aと、上記物体画像を上記表示サイズで表示し、併せて上記指示画像データに基づく表示処理を行う表示装置と、を含むことを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法
【課題】煩雑な操作をすることなく、観察したい部位を最適な視点及び視線方向で簡単に表示する。
【解決手段】医用画像から抽出された、いくつかの骨部品で構成される骨部位を含む骨領域を、骨部品単位で認識する手段と、表示する骨部位を選択する手段と、前記選択された骨部位に対応する前記骨部品を決定する手段と、前記選択された骨部位を観察する視点及び視線方向を決定する手段と、前記骨部品単位で認識された医用画像の骨領域と、前記決定された視点及び視線方向に基づいて、前記骨領域を前記視点及び視線方向で表示するボリュームレンダリング画像を生成する手段と、前記生成されたボリュームレンダリング画像を表示するよう制御する手段と、を備えたことを特徴とする画像処理装置を提供することにより前記課題を解決する。
(もっと読む)
海苔の外観検査方法及びその装置
【課題】海苔が傾斜姿勢で撮像手段に搬送された場合であってもシンプルな判別処理によって欠けの有無検査が行える海苔の外観検査方法及びその装置を提供することを技術的課題とするものである。
【解決手段】各海苔画像を搬送方向(撮像画素Pの配列方向)に対して同方向になるように画像回転処理を行った後に、該海苔画像について、四辺の外辺接線となる水平接線及び垂直接線から任意画素内側に検査領域線を設定し、該検査領域線で囲まれた検査領域内に欠けがあるか否かを判別するようにしたので、海苔の欠け判別は、海苔周縁部分の凹凸形状の影響を受けずに海苔の全周縁部分に亘って的確に行え、また、前記検査領域線は、撮像画素Pの配列方向に沿った単純な垂直基準線及び水平基準線によって構成することができる。このため、シンプルな判別処理によってよって広い検出範囲の海苔の欠け判別が行えるようになる。
(もっと読む)
マーク作製装置およびマーク作製方法
【課題】貼付すべき場所の位置情報を含むマークを作製するマーク作製装置を提供する。
【解決手段】マーク作製装置10は、カメラ1によって撮影した基準マークMSの画像に基づいてカメラ1から基準マークMSまでの第1の距離およびカメラ1に対して基準マークMSが存在する方向に関する第1の方向情報を検出するとともに、基準マークMSの位置情報、第1の距離および第1の方向情報に基づいてカメラ1の位置を決定する。また、マーク作製装置10は、カメラ1によって撮影したダミーマークの画像に基づいて、カメラ1の位置の決定方法と同じ決定方法によってダミーマークDMの位置を決定する。そして、マーク作製装置10は、その決定したダミーマークDMの位置を貼付すべき場所の位置情報として含むマークM1を作製し、印刷器5によって印刷する。印刷されたマークM1は、ダミーマークDMの位置に貼付される。
(もっと読む)
長尺物の外観検査方法及びその装置
【課題】外観検査を高精度で行うことのできる長尺物の外観検査方法及びその装置を提供する。
【解決手段】各照射装置10に対してホースHを長手方向に移動させながら、照射線Lを所定時間おきに撮像し、各撮像データからホースHの各幅方向位置と照射線Lの高さ方向位置とを対応させた高さ方向位置データをそれぞれ抽出し、各高さ方向位置データを基準データによって減算処理するとともに、減算処理された各高さ方向位置データを所定の色調基準に基づき撮像順に並べて検査用画像を作成する上で、減算処理対象の高さ方向位置データ及びその高さ方向位置データと撮像順が近い所定回数分の減算処理前の高さ方向位置データをホースHの各幅方向位置ごとに平均化して基準データを作成する。これにより、ホースHがうねりを伴っている場合でも、高さ方向位置データからうねり分がキャンセルされる。
(もっと読む)
自分でできるフォトリアリスティックなトーキングヘッド作成システム及び方法
自分でできるフォトリアリスティックなトーキングヘッド作成システムであって、テンプレートと、対象者の画像出力信号を有するディスプレイとビデオカメラとを備えた携帯用機器と、前記テンプレートと前記対象者の画像出力信号とを合成画像に混合するためのミキサプログラム及び前記合成画像を表現する出力信号を有するコンピュータと、前記対象者に合成画像として表示するために前記合成画像の信号を前記ディスプレイに送信するようにされたコンピュータと、前記ビデオカメラが前記対象者の前記画像を収集して前記対象者に前記合成画像を表示できるように、さらに前記対象者が前記対象者の前記画像を前記テンプレートに合わせて配置できるようにされた前記ディスプレイ及び前記ビデオカメラと、前記対象者の前記収集画像を表現する前記ビデオカメラの前記出力信号を受信するための入力を有し、前記テンプレートに実質的に合わせて配置された前記対象者の前記画像を保存するための保存手段とを備えるシステム。 (もっと読む)
オブジェクト分類装置、駐車スペース検出装置、オブジェクト分類方法、及びプログラム
【課題】ステレオカメラを用いずに、オブジェクトの高さを適切に認識できるオブジェクト分類装置を提供する。
【解決手段】移動中の移動体に搭載されたカメラで撮影された撮影画像を2以上受け付ける撮影画像受付部11、その撮影画像を蓄積する蓄積部12、蓄積された、撮影の時間差を有する2以上の撮影画像にそれぞれ含まれるオブジェクトを検出するオブジェクト検出部13、2以上の撮影画像間における、オブジェクト検出部13が検出したオブジェクトの変化を検出する変化検出部14、変化検出部14の検出した変化が、所定の高さよりも高いオブジェクトの第1の変化パターンに対応するのか、所定の高さよりも低いオブジェクトの第2の変化パターンに対応するのかを判断する判断部16、その判断結果を用いて、オブジェクトの高さに関するオブジェクト情報を出力する出力部17を備える。
(もっと読む)
撮像装置及びそのプログラム
【課題】 画質の劣化を抑えるとともに、メイン被写体がブレない良好が画像を得ることができる撮像装置及びそのプログラムを実現する。
【解決手段】 シャッタボタンが半押しされると顔検出処理を行う(S3)。そして、顔検出処理によって複数の顔が検出され(S5でY)、該検出された顔の中に登録された人物の顔があると認識された場合は(S7でY)、該認識された被写体をメイン被写体と判断し、該認識された顔の動きを検出する処理を開始する(S8)。一方、顔検出処理によって1つの顔が検出された場合(S5でN)、複数の顔が検出されたが登録された人物の顔があると認識されなかった場合は(S7でN)、該検出された顔をメイン被写体と判断し、該検出された顔の動きを検出する処理を開始する(S9)。そして、シャッタボタンが全押しされ、検出された動き量が所定量以上であると(S12でY)、感度式ブレ軽減処理を行う(S14)
(もっと読む)
超音波診断装置
【課題】任意の時相について正確な超音波画像を表示させることを可能とする超音波診断装置を提供する。
【解決手段】超音波診断装置1は、超音波探触子3から送られる被検者の生体組織の超音波画像情報を記憶部15に保存する。追跡処理部25は指定された時相の前後の画像情報(フレーム)を記憶部15から読出して小領域画像(ROI)の移動量を算出する。中間仮想フレーム算出部27は指定時相の前後の画像情報に対して時間方向内分を行って、指定された時相に時相のそろった中間仮想フレームを算出する。中間表示フレーム算出部29は、算出された中間仮想フレームを基にして空間方向内分を行い、表示部17の画素位置に対応した輝度情報を有する中間表示フレームを算出する。
(もっと読む)
撮像装置
【課題】蛍光検出を正確に行うことすることができる撮像装置を提供する。
【解決手段】撮像装置は、受光面を備え、基板面上に形成された複数のスポットからなる少なくとも1つのスポットエリアを受光面にて撮像する撮像素子39と、受光面上に付着した付着物を取り除くための清掃部42と、を有する。
(もっと読む)
2次元画像による3次元組立て検査
組立て検査の方法と装置を開示する。画像を同時に収集する3台のカメラによる三角測量を用いた、各サブコンポーネントの3次元位置測定を実行する。オペレータは、カメラを用いた組立ての同じサブコンポーネントに対応した1つの2次元モデルを学習させる。実行時間中、各モデルは各カメラの視野に記録されて、サブコンポーネントの測定された3次元位置を提供する。そして、測定された3次元位置は、期待される名目上の3次元位置と比較されて、3次元位置における差異が許容範囲にあるか照合される。本発明は、アセンブリ検査を簡素化するものであり、組立てライン上に固定された複数のカメラのみを必要とする。わずかなオペレータの作業の後に、本発明は自動的に組立て検査を実行する。本発明は、固定冶具を用いずに組立て検査を実行するので、機械視覚システムに、任意の3次元位置と向きを備えた部品が提供される。高速に移動する組立てライン上の部品を照明するために、ストロボ照明を利用することができる。 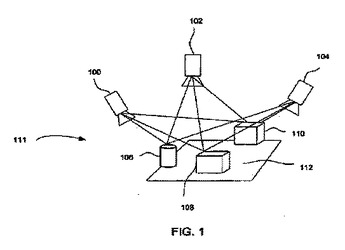 (もっと読む)
(もっと読む)
281 - 300 / 569
[ Back to top ]