
Fターム[5B057DC02]の内容
Fターム[5B057DC02]の下位に属するFターム
Fターム[5B057DC02]に分類される特許
221 - 240 / 569
表面検査装置および表面検査方法
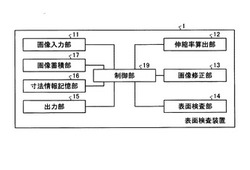
【課題】移動物体を簡易な構成で正確に表面検査する表面検査装置を得ること。
【解決手段】移動物体を相対移動させながら移動物体の各部分を順次撮像し、撮像した各部分の画像を組み合わせることによって得られる移動物体の画像に基づいて、移動物体の表面検査を行う表面検査装置において、移動物体の実寸法および移動物体の画像上での画素数に基づいて、移動物体を撮像した際に移動物体の速度変化に起因して変化する画像上での伸縮率を、移動物体の所定領域毎に算出する伸縮率算出部12と、伸縮率に基づいて、移動物体の各領域の画像を移動物体の実寸法に応じた比率の画像に修正する画像修正部13と、修正後の画像を用いて移動物体の表面異常を抽出するとともに、抽出した表面異常部分の画像上での画素数に基づいて、抽出した表面異常部分の実寸法を算出する表面検査部14と、を備える。
(もっと読む)
顔画像の特徴点検出方法およびその装置

【課題】顔の特徴点を高い精度で、且つ短い処理時間で検出可能とする顔画像の特徴点検出方法およびその装置を提供することを目的とする。
【解決手段】顔を撮影して顔画像を取得する顔画像取得ステップと、顔画像に基づいて上下方向および/または左右方向の顔の向きを検出する顔向き角度検出ステップと、顔画像中で、探索の対象とする顔の特徴点毎に該特徴点を探索する探索範囲の位置および大きさを、顔向き角度検出ステップに検出された顔の向きに基づいて設定する探索範囲設定ステップと、探索範囲設定ステップで設定された各探索範囲の画像に基づいて、対応する特徴点をそれぞれ検出する特徴点検出ステップとを備える顔画像の特徴点検出方法である。
(もっと読む)
自動赤目検出
入力イメージ20内の赤目候補領域24が判定される。この処理で1つ又は2つ以上の赤目計量値28の個々の組が赤目候補領域24の各々に関連付けされる。入力イメージ20内の顔候補領域30が確定される。この処理で1つ又は2つ以上の顔計量値34の個々の組が顔候補領域30の各々に関連付けされる。個々の結合計量ベクトル78が赤目候補領域24の各々に割り当てられる。結合計量ベクトル78は、赤目計量値28及び顔候補領域30のうちの選択された1つに関連付けされた顔計量値34の組から導出された計量値を含む。1つ又は2つ以上の赤目候補領域24は、赤目候補領域24に割り当てられた個々の結合計量ベクトル78に基づいて赤目アーチファクト又は非赤目アーチファクトとして分類される。 (もっと読む)
医用画像表示装置
【課題】表示された医用画像の変化を定量的に捉えることによって、異常部位の検出を容易に行うことを可能とする医用画像表示装置を提供する。
【解決手段】医用画像表示装置1は、医用画像情報30を取得して管腔臓器31の芯線32を抽出し(ステップ101及びステップ102)、管腔臓器31の芯線32上の各点eiについて、方向ベクトルの算出処理(ステップ104)、平面設定処理(ステップ105)、断面画像情報作成処理(ステップ106)、特徴量算出処理(ステップ107)を行って、算出された特徴量と点eiの位置とを対応付けてグラフを作成する(ステップ110)。
(もっと読む)
方法、コンピュータ・プログラム、システム(センサを使用して表面上に配置された物体を識別するシステムおよび方法)
【課題】表面上に配置された物体を識別する方法、システム、およびコンピュータ・プログラムを提供すること。
【解決手段】物体が表面上に配置されているという表示が受信される。物体に関連する複数の物理的特徴が識別される。複数の物理的特徴を使用して、データ構造が探索され、複数の物理的特徴に合致する物理的特徴を有する単一の物体の存在が判定される。合致に応答して、単一の物体が、関連するプレゼンテーションを有するかどうかに関して判定が行われる。関連するプレゼンテーションの存在に応答して、関連するプレゼンテーションがユーザに提示される。
(もっと読む)
顔画像処理装置
【課題】演算負荷の増大を抑えつつ簡素な構成でめがねに映り込んだ画像を検出することが可能な顔画像処理装置を提供すること。
【解決手段】車両の移動に関する情報を取得し、取得された情報に基づいて、運転者のめがねレンズ40に写り込むエッジ画像の移動状態を推定し、推定されたエッジ画像の移動状態に基づいて、実際にめがねレンズに映り込んだエッジ画像E1を検出する。車外の風景に起因するエッジ画像E1は、車両の移動状態に伴って移動するため、車両の移動状態に基づいて、めがねレンズ40に写り込むエッジの移動状態を推定する。この推定された移動状態と同様に位置変化するエッジ画像E1を、不要なエッジ画像として設定して、目候補から除外することができる。そのため、新たに他の装置を追加することなく、簡素な構成でめがねレンズ40に映り込んだ不要なエッジ画像E1を検出することができる。
(もっと読む)
腫瘍領域サイズ測定方法および装置ならびにプログラム
【課題】腫瘍を評価するための指標として、腫瘍の3次元的大きさを適切に反映した長軸・短軸の長さを提供する。
【解決手段】3次元医用画像から腫瘍領域を決定し、決定された腫瘍領域の長軸および短軸を決定し、決定された長軸および短軸の長さを測定し、測定した長軸および短軸の長さを表示する。決定された長軸および短軸の長さを腫瘍領域のサイズとする。
(もっと読む)
顔画像処理装置
【課題】顔の表情を自動的に判断し希望の画像を獲得することができる顔画像処理装置を提供する。
【解決手段】顔画像を含む人物の複数枚の画像を入力し、この入力された各画像ごとに人物の顔領域を抽出し、この抽出された各画像ごとの顔領域の表情の評価値を求め、この評価された評価値を用いて前記入力された画像内に表示された人物の顔の表情が撮影者が希望した表情となる画像であるかを各画像ごとに判定し、この判定結果を利用して前記複数枚の画像の中で人物の顔の表情が撮影者が希望した表情と判定された画像を選択して出力する。
(もっと読む)
車外監視装置
【課題】車外環境に応じて適切な距離データの算出感度を設定し、車外の監視精度を向上することができる車外監視装置を提供する。
【解決手段】ステレオ画像の基準画像から抽出した画素ブロックの輝度特性と相関を有する画素ブロックを比較画像中から特定することにより各画素ブロック毎の視差を算出するとともに、視差が算出された画素ブロックの中から距離データ算出対象となる画素ブロックを抽出し、抽出した画素ブロックに関する視差を距離データとして算出することによって車外監視を行うステレオ画像認識装置2において、輝度判定閾値設定部22を設け、各画素ブロックに対して算出された距離データの距離分布に基づいて輝度判定閾値DCDXthを可変設定することで、距離データ算出対象となる画素ブロックの抽出感度を制御することにより、車外の監視制度を向上することができる。
(もっと読む)
画像処理装置及びプログラム
【課題】顔に焦点が合っている画像であるか否かを容易に判定する。
【解決手段】被写体画像の画像データと合焦位置情報を関連付けて記録する記録媒体5を備える撮像装置100であって、記録媒体に記録されている画像データに基づいて、被写体画像内の人物の顔を検出する処理と、検出された人物の顔の位置に係る顔位置情報を取得する処理と、取得された顔位置情報と画像データと関連付けて記録されている合焦位置情報を比較して、被写体画像内の人物の顔に焦点が合っているか否かを判定する処理を行うCPU71を備えている。
(もっと読む)
距離画像処理装置および方法、距離画像再生装置および方法並びにプログラム
【課題】距離画像の画像ファイルのデータ量を効率よく低減できるようにする。
【解決手段】撮像部21A,21Bが、被写体を撮像することにより、被写体の3次元形状を表す奥行き情報および位置情報を含む距離値を算出するための基準画像および参照画像を取得する。距離画像生成部31が、基準画像および参照画像から距離値を算出する。距離画像変換部32が、所定範囲にある奥行き情報について、所定範囲外にある奥行き情報よりも大きい量子化数により量子化し、距離画像符号化部33が量子化された位置情報を含む距離値を各画素の画素値とする距離画像を符号化し、圧縮/伸長処理部24が符号化された距離画像の画像ファイルを生成する。
(もっと読む)
画像処理システム、画像処理方法、およびプログラム
【課題】物体の表面からの深さに応じて物体内部の物質の量を光学的に算出することができる画像処理システムを提供すること。
【解決手段】画像処理システムは、物体の表面から、物体の内部に存在するオブジェクトまでの深さを算出する深さ算出部と、オブジェクトからの光を受光する受光部と、受光部が受光した光の量および深さ算出部が算出したオブジェクトまでの深さに基づいて、受光部が受光する光を発する、オブジェクト内の物質の量を算出する物質量算出部とを備える。
(もっと読む)
顔照合装置
【課題】効率的且つ様々な条件でも安定した顔照合を行うための技術を提供する。
【解決手段】画像入力部10から画像が入力される。入力された画像は画像記憶部11に記憶され、顔検出部12が、画像記憶部11に記憶された画像から顔を検出する。次に、特徴量抽出部13が、当該検出された顔から特徴量を抽出し、スコア算出部14が、当該抽出された特徴量と、登録者情報記憶部15に記憶されている登録者の特徴量との類似度を、スコアとして算出する。そして、スコア調整部16が、スコア調整パラメータを用いて当該算出されたスコアを調整し、判定部17が、調整されたスコアと予め定められた閾値とを比較することにより、画像入力部10から入力された画像の人物が、登録者か否かを判定する。スコア調整パラメータは、他人受入率が登録条件や照合条件によらず略一定になるようにスコアを調整するためのものである。
(もっと読む)
照明条件の測定方法および照明条件の測定装置
【課題】 安価な装置で照明条件を取得可能な技術を提供する。
【解決手段】 撮像装置Cを、カメラレンズの光軸上に空間座標の原点Oが位置する姿勢に調整する。この撮像装置Cをもって双方向反射率分布関数(BRDF)の散乱面を有する測定対象素材Mが貼付されたプレートP1を、空間座標内の照明方向群mVG1,mVG2の各方向mV1,mV2と測定対象素材Mの単位反射ベクトルvRとが一致する状態で撮像する。この撮像画像から測定対象素材Mに対応する位置の輝度値群Iiを取得保存する。測定装置100が、散乱面の既知の双方向反射率分布関数(BRDF)を用いて輝度値群Iiから照明強度群Eiを照明条件として算出して求める。
(もっと読む)
外界認識装置
【課題】
衝突判定を行う場合、自車情報に異常が発生するとシステムの機能が著しく低下する。
【解決手段】
外界認識装置は、自車の情報を取得する自車情報取得手段と、外界認識センサが検知した物体の情報を取得する物体情報取得手段と、自車情報取得手段が取得した自車情報に基づいて自車の予測進路を設定する予測進路設定手段と、物体情報取得手段が取得した物体情報と予測進路設定手段が設定した予測進路に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第1の衝突判定手段と、物体情報取得手段が取得した物体情報に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第2の衝突判定手段と、自車情報取得手段が取得した自車情報の異常を判定する自車情報判定手段と、自車情報判定手段が、自車情報取得手段が取得した自車情報が異常と判定した場合、第2の衝突判定手段を選択する衝突判定選択手段とを備える。
(もっと読む)
画像処理システム、画像処理方法、およびプログラム
【課題】物体の内部に存在するオブジェクトのぼけを物体の表面までの距離に応じて適切に補正することができる画像処理システムを提供すること。
【解決手段】画像処理システムは、物体の内部に存在するオブジェクトの画像を補正する。画像処理システムは、オブジェクトからの光の画像であるオブジェクト画像を取得するオブジェクト画像取得部と、物体の表面からオブジェクトまでの深さを特定する深さ特定部と、オブジェクト画像を撮像した撮像部から物体の表面までの距離情報を特定する距離情報特定部と、距離情報および深さに応じて、オブジェクト画像を補正する画像補正部とを備える。
(もっと読む)
距離画像生成装置、環境認識装置、及びプログラム
【課題】環境認識の精度を向上させることができる距離画像生成装置、環境認識装置、及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
表示制御装置、表示制御方法、及び、表示制御プログラム
【課題】装置周辺の画像を撮像し、撮像された画像を解析した結果に基づいて表示画面の制御を行う表示制御装置等を提供する。
【解決手段】表示画面270と、表示画面270の前方を撮像するカメラ260とを備え、撮像された画像を解析して表示画面270の表示制御を行う表示制御装置100であって、カメラ260が撮像した画像から所定の面積以上の一の人物の顔を認識する顔認識処理部210と、顔画像から当該顔の特徴を抽出する特徴抽出処理部220と、前記顔の特徴を特徴データとして予め保存する特徴データ保存テーブル250と、抽出された顔の特徴及び特徴データ保存テーブル250が予め保存する特徴データを比較して、一致するかどうかを判定する判定処理部230と、判定処理部230が判定した結果、顔の特徴が一致しない場合に前記表示画面に表示された表示データを非表示に制御する表示制御処理部240とを備える。
(もっと読む)
情報取得装置、情報取得方法および情報取得プログラム
【課題】対象物の分光画像と距離画像を同時に取得する。
【解決手段】少なくとも3チャンネルの分光感度を有し、撮像対象物の画像データを取得する第1の撮像手段と、少なくとも3チャンネルの分光感度を有し、該3チャンネルの分光感度のうちの1チャンネルが第1の撮像手段が有する分光感度のうちの1チャンネルと同一の分光感度であり、他のチャンネルの分光感度が第1の撮像手段が有する分光感度と異なる分光感度を有し、撮像対象物の画像データを取得する第2の撮像手段と、分光感度が同一のチャンネルである第1の撮像手段による画像データと、第2の撮像手段による画像データとを用いて、距離画像情報を生成する距離画像生成手段と、第1の撮像手段と第2の撮像手段のそれぞれが有する各チャンネルの画像データから分光画像情報を生成する分光画像情報生成手段とを備えた。
(もっと読む)
画像処理装置及び画像処理方法及びプログラム
【課題】携帯機器などでも利用可能なように顔検出装置の構成を簡単にしつつ、且つ顔の向きを精度良く検出できるようにする。
【解決手段】入力された画像データから被写体の顔の特徴部位を検出する特徴部位検出部101と、特徴部位検出部によって検出された特徴部位を含む領域を選択する領域選択部102と、領域選択部によって選択された領域の面積を算出する面積算出部104と、面積算出部により算出された面積に基づいて被写体の顔の向きを検出する顔向き検出部105とを備える。
(もっと読む)
221 - 240 / 569
[ Back to top ]