
Fターム[5B057DC33]の内容
画像処理 (340,757) | 分析部、分析手段 (35,413) | 照合 (10,006) | 2つの画像の対比、サブトラクション (5,793) | 辞書画像との対比 (3,074)
Fターム[5B057DC33]の下位に属するFターム
相関値を用いるもの (750)
Fターム[5B057DC33]に分類される特許
321 - 340 / 2,324
画像処理装置、コンテンツ配信システム、画像処理方法、及びプログラム

【課題】人の向きによらずに人物像を精度よく検出し、かつこの人の体の向きを検出する。
【解決手段】上体特徴データ記憶部110は、人物の上体であることを示し、かつ当該上体が特定の方向を向いていることを示す上体方向特徴データを、当該上体方向特徴データの方向を示す方向データに対応付けて複数の方向別に記憶している。上体検出部140は、上体特徴データ記憶部110が記憶している複数の上体方向特徴データを方向データに対応付けて読み出し、複数の上体方向特徴データそれぞれを用いることにより、画像データから人物の上体を示す上体画像データを抽出する。
(もっと読む)
パンタグラフ監視装置

【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体に設置されているすり板の欠けや抉れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理部が、予め設定される基準画像上のパンタグラフの舟体の画像と前記入力画像上のパンタグラフ舟体の画像とを比較する検査小領域画像比較部5h、及び、比較結果に基づいてパンタグラフ舟体の欠けや抉れの有無を判断する比較判断部5iを有するパンタグラフ状態検査処理手段を備える構成とした。
(もっと読む)
画像処理装置、画像形成装置、決定方法、プログラム及びコンピュータ読み取り可能な記憶媒体
【課題】複写禁止画像を特定付ける特定パターンを、特別な調整を行わなくても、読み取った画像データから確実に検出する画像処理装置を提供する。
【解決手段】画像判定部40は、特定パターンの色の範囲を規定する特定色範囲を用いて、判定対象である画像データの画素の色を判定する。パラメータ算出部561は、画像読取部1が実際に読み取った基準チャート23の色パラメータの値(R,G,B,G−R,G−B,R−B)である読取値が、見本データ157の色パラメータの値である目標値に近づくように補正する。そして、特定範囲決定部562は、基準チャート23の前記読取値を前記補正パラメータにより補正した後の補正値を用いて、上記特定色範囲を算出する。よって、個々の画像処理装置の読取特性に応じた特定色範囲を算出でき、確実に特定パターンを検出できる。
(もっと読む)
通信端末
【課題】条件に左右されて望んだ形での風景を撮影できなくても、指示に従って撮影することで望んだ風景の画像を取得することができる情報提供システム、通信端末、情報サーバ、情報提供方法、情報提供プログラムを提供する。
【解決手段】通信端末で、風景の撮影場所を管理する情報サーバへ位置情報を送信し、前記情報サーバで、前記位置情報に対応した風景の画像及び風景を撮影するための指示を撮影情報として前記通信端末へ送信する。前記通信端末で、前記撮影情報を参照して現場を撮影し、前記撮影した現場の画像を前記情報サーバへ送信する。前記情報サーバで、前記通信端末から受信した画像と、前記位置情報に対応した風景の画像とを比較し、比較した結果に応じて、前記受信した画像を加工する。前記情報サーバで、前記加工された前記現場の画像について、前記サーバから受信する通信端末と備える情報提供システム。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体又はこの舟体に設置されているすり板の折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理部とを備えたパンタグラフ監視装置において、画像処理部が、検査パンタグラフ画像中に撮影されているパンタグラフに対して直線を抽出する処理を行う直線抽出部5gと、抽出した直線の状態に基づいてパンタグラフの舟体もしくはすり板又はその両方の折れの有無を判断する折れ判断部5hとを備えるパンタグラフ舟体形状検査部5Cを有する構成とした。
(もっと読む)
ボトリング製品検索装置
【課題】特定の規約に基づくIDコードの設定等を行うことなく製品検索ができるボトリング製品検索装置を提供する。
【解決手段】ボトリング製品のラベル貼付部をカメラにより撮影したカメラ撮影画像から対象ボトリング製品を検索するボトリング製品検索装置であって、ラベルのボトル貼付面への中心投影画像に外接する矩形枠を所定のアスペクト比に座標変換して正規化したインデックス画像をボトリング製品の属性に関連付けて格納するデータ格納部と、前記カメラ撮影画像から抽出したラベル画像に外接する矩形枠を座標変換して前記インデックス画像のアスペクト比に一致させる画像変換部6と、画像変換部6での出力画像をインデックス画像中から検索して撮影したボトリング製品を特定する検索部7と、を有する。
(もっと読む)
撮像装置及び撮像方法
【課題】欠陥検出に適した画像を取得することを目的とする。
【解決手段】被検査物の検査対象領域に照明光を照射し、検査対象領域の基準画像を基準となる基準撮像条件に従って取得し、基準画像をクラスタリング処理して複数のクラスタに分割し、各クラスタが所定の条件に合致するかを判定し、各クラスタが所定の条件に合致しない場合に、所定の条件に合致しないクラスタの撮像条件を変更し、所定の条件に合致しないクラスタの画像を変更された撮像条件に従って取得し、全てのクラスタが所定の条件に合致するまで撮像条件の変更及びクラスタの画像の取得を繰り返し、全てのクラスタが所定の条件に合致すると判定された場合に、所定の条件に合致した各クラスタの画像を合成して検査対象領域の合成画像を取得する。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】合成時にボケや不快なアーティファクトが生じない高品質な画像を生成することを目的とする。
【解決手段】複数の画像間の位置合わせを行う位置合わせ手段と、位置合わせされた前記複数の画像を合成して合成画像を生成する画像合成手段とを備えた画像処理装置であって、位置合わせ手段は、複数の画像のうち何れか1つを基準画像とし、他の画像を参照画像とした場合に、参照画像を所定の境界線によって区切ることにより複数の領域に分割する領域分割手段と、参照画像間で前記領域がそれぞれ異なるように境界線を移動させて各参照画像の領域を変更する領域変更手段と、を備え、領域毎に基準画像に対して位置合わせ対象の参照画像の位置合わせを行う。
(もっと読む)
情報処理装置および情報処理方法
【課題】安価かつ小型に実現でき、高速かつ正確に非接触にジェスチャー等のターゲット・オブジェクトを認識することができる装置を提供する。
【解決手段】一方の視差画像を2以上のレベルを持つグレイスケール画像に変換する手段と、前記変換したグレイスケール画像から所定方向に連続する同一レベルを有する連続画素群をオブジェクトとして抽出し、前記オブジェクトごとに、該オブジェクトの位置及び予め定めた最大許容視差値に基づいて、前記一方の視差画像において基準領域を設定するともに、他方の視差画像において探索エリアを設定し、前記基準領域の画像をテンプレートとして前記探索エリア内においてテンプレートマッチングを行うことにより基準領域に類似する類似領域を探索し、基準領域と類似領域の位置の差に基づいて該オブジェクトに関する視差値を決定する手段と、を備える。
(もっと読む)
位置姿勢推定装置及びその方法
【課題】 物体・撮影環境において、安定的に物体の位置及び姿勢を計測することを目的とする。
【解決手段】 物体を撮影した撮影画像を入力する。物体の3次元座標を含む距離画像を入力する。撮影画像から画像特徴を抽出する。画像特徴に対応する距離画像上の位置における3次元座標から、画像特徴が物体の形状を表すか否かを判別する。物体の形状を表すと判別された画像特徴と物体の形状を有する3次元モデルの一部とを対応付ける。対応付けに基づいて、物体の位置姿勢を推定する。
(もっと読む)
顔検出方法および装置並びにプログラム
【課題】検出対象画像から顔画像を検出する処理において、検出対象画像に施す前処理としての正規化処理につき、種類の異なる各正規化処理の利点をより活かし、高精度、かつ、効率のよい顔検出を可能にする。
【解決手段】処理対象となる画像に対する前処理として、検出対象画像から顔画像候補を抽出するラフな検出段階においては、処理時間が短い、画像全体の画素値を一つの変換曲線にしたがって変換する全体正規化処理を採用し(ステップS3)、顔画像候補が真の顔画像であるか否かを判別する絞込み段階においては、処理時間は長いが高い効果が期待できる、局所正規化処理を採用する(ステップS11)。
(もっと読む)
点灯色識別装置及びプログラム
【課題】撮像画像が表わしている信号灯の点灯色を精度よく識別することができるようにする。
【解決手段】候補領域抽出部24によって、前方画像から、信号灯の候補領域を繰り返し抽出すると共に、追跡部26によって、対応する信号灯の候補領域を追跡する。切替判定部28によって、追跡された信号灯の候補領域の位置の変化から、点灯色の切り替わりを判定し、点灯色が切り替わったと判定された場合、点灯色が切り替わったときの信号灯の候補領域の位置及び色の変化が、点灯規則に沿った変化であるか否かを判定する。点灯色識別部30によって、信号灯の候補領域の位置及び色の変化が、点灯規則に沿った変化でないと判定された場合、点灯規則に沿って変化したときの点灯色を、信号灯の候補領域の点灯色として識別する。
(もっと読む)
画像認識装置
【課題】撮像された画像にテアリングパッドが写り込んでいたとしても、簡易な構成で精度良く当該画像からドライバーの状態を認識することができる画像認識装置を提供する。
【解決手段】画像認識装置は、上記運転席前方から当該運転席方向を撮像する撮像手段と、当該撮像手段が撮像した画像の予め定められた認識範囲において上記ドライバーの顔の状態を検出し、当該顔の状態を示す顔情報を生成する顔情報生成手段と、上記認識範囲において上記車両のステアリングパッドを検索する検索手段と、当該検索手段によって上記認識範囲から上記車両のステアリングパッドが検出された場合、当該認識範囲を変更する変更手段とを備える。
(もっと読む)
監視装置および方法、並びにプログラム
【課題】顔画像による認識率を向上できるようにする。
【解決手段】顔画像抽出部202は、カメラ38により撮像された画像より、照合対象者の顔画像を抽出する。器官抽出部203は、照合対象者の顔画像より、顔を構成する各器官の部位を抽出する。器官スコア付与部204は、抽出された器官の信頼度を算出する。適正判定部206は、信頼度に基づいて、照合対象者の顔画像として適正であるか否かを判定する。生体情報認識装置21は、適正であると判定された照合対象者の顔画像と、蓄積された蓄積者の顔画像との類似度を計算し、類似度と所定の閾値との比較により、照合対象者の顔画像が蓄積者の顔画像であるか否かを判定する。本発明は、監視システムに適用することができる。
(もっと読む)
検査システム、その方法及びプログラム
【課題】作業スペースと設備投資との問題を解決し、外観検査の自動化を行うことが可能な検査システム及びその方法を提供する。
【解決手段】本発明の検査システムは、固定されておらず、不確定な位置で検査対象の外観を撮像し撮像画像とする撮像装置と、予め検査対象を撮像した参照画像を記憶する記憶部と、撮像装置の撮像座標上の撮像画像を、参照画像を撮像した際の参照撮像座標上に座標変換し、変換した結果を比較画像として出力する画像処理部と、参照画像と比較画像とを比較するマッチング処理部とを備える。
(もっと読む)
顔検出方法およびこれを用いた撮影装置
【課題】顔検出処理全体の計算量を減らし処理速度を向上させる。
【解決手段】まず、撮像手段2により人物被写体の撮影が行われ、各色成分毎の光が受光素子2aにより受光され画素データPxが取得される。次に、画像生成手段3において、画素データPxを用いたカラー画像からなる原画像PとG画素データを用いたG信号画像Pとが生成される。その後、G信号画像Pを用いて顔検出を行うことにより、原画像P0における顔画像FPを検出する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】眼鏡の画像において、反射光を除去した画像に補正するときに、誤って目の白目部分も補正してしまい、目の白目部分が不正な画像となってしまう可能性がある。
【解決手段】取得した画像から顔を検出する顔検出部18と、顔の画像から目の輪郭を検出して当該輪郭で囲まれた目領域を設定する目領域設定部19と、顔の画像から眼鏡を検出して眼鏡領域を設定する眼鏡領域設定部20と、記眼鏡領域内の画像を補正する画像補正部22と、を有する。そして、画像補正部22は、眼鏡領域内における目領域を除く領域となる差分領域について、所定の閾値を超える輝度を有する画像部分に対して補正を行う。
(もっと読む)
画像解析
コンピュータにより実施される画像内の特徴を識別する方法を提供する。方法は、複数の第2のモデルを前記画像に適合させるステップであって、前記複数の第2のモデルは共に関心領域をモデル化し、前記関心領域の各部分は、前記複数の第2のモデルのうちの少なくとも2つによりモデル化される、ステップと、前記複数の第2のモデルの前記適合に基づき、前記画像内の前記特徴を識別するステップと、を有する。 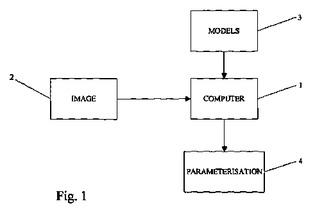 (もっと読む)
(もっと読む)
自動欠陥分類のための教師データ作成方法、自動欠陥分類方法および自動欠陥分類装置
【課題】基板の欠陥を自動的に分類するための教師データを作成する方法およびこれを用いた欠陥分類方法ならびに装置において、再現性、客観性に優れた教師データを提供するとともに、該教師データの作成におけるオペレータの負荷を軽減する。
【解決手段】収集した欠陥画像データの中から、複数の分類カテゴリに対して少なくとも1つ、当該カテゴリの典型例としての教師画像の教示のみオペレータが行う(ステップS202)。ホストコンピュータは、各欠陥画像の特徴量を算出し(ステップS203)、特徴量空間における教師画像とのユークリッド距離に応じて各欠陥画像を仮分類する(ステップS204)。そして、仮分類された各欠陥画像をアンサンブル分類器を用いて再分類し(ステップS205〜S209)、順次分類を確定させてゆく。
(もっと読む)
321 - 340 / 2,324
[ Back to top ]