
Fターム[5C054EA05]の内容
閉回路テレビジョンシステム (47,623) | 処理系 (4,343) | 受像系 (2,156)
Fターム[5C054EA05]に分類される特許
61 - 80 / 2,156
画像処理装置、画像処理方法およびプログラム
【課題】ぼかしの領域の位置がずれる可能性を低減でき、ぼかしの領域を必要最小限にできる画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置は、画像取得部と、対象検出部と、記録部と、予測位置情報算出部と、画像処理部を有している。画像取得部は、時系列に複数の画像を取得する。対象検出部は、前記画像取得部が取得した画像から画像処理を施す対象を検出する。記録部は、前記対象検出部が検出した前記対象の位置情報をそれぞれの時刻情報とともに記録する。予測位置算出部は、前記記録部に記録された複数の前記位置情報および前記時刻情報に基づき、前記複数の画像より後に撮影される画像における前記対象の予測位置情報を算出する。画像処理部は、前記後に取得される画像の前記予測位置情報算出部により算出された前記予測位置情報に応じた部分に前記画像処理を施す。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム

【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
画像表示システム、画像表示装置、画像表示方法、及び画像表示プログラム
【課題】運転時の安全性を向上できる画像表示システム、画像表示装置、画像表示方法又は画像表示プログラムを提供する。
【解決手段】撮影装置は画像を撮影し、距離情報取得部は前記撮影装置から各々入力された画像信号が表す被写体までの距離情報を取得し、位置特定部は車両の運転状況を表す運転状況情報に基づいて車両の予想位置を表す位置情報を特定し、画像出力部は前記画像信号が表す被写体のうち、前記位置特定部が特定した位置にある被写体を表す画像を選択する。
(もっと読む)
撮像監視画面及び全方位撮像画面監視システム
【課題】全方位撮像画面の撮像エリアの外周での映像の分解能が粗い場合でも、鮮明な画像を得られる撮像監視画面及び全方位撮像画面監視システムを提供する。
【解決手段】全方位撮像画面監視システムSは、全方位を動画として撮像可能な固定された第1の撮像手段10と、動画として撮像可能な固定された第2の撮像手段20と、第1の撮像手段10と第2の撮像手段20で撮像した動画を録画する記録手段30と、記録手段30を制御する制御手段40と、第1の撮像手段10、第2の撮像手段20、記録手段30からの撮像を表示する表示手段50と、を備え、第2の撮像手段20は、第1の撮像手段10の撮像領域の外周を撮像する位置に配置されたものである。
(もっと読む)
画像処理装置、方法、プログラム、および監視システム
【課題】監視対象者の一定時間の行動状態を把握する。
【解決手段】短背景生成部123が、滞在者が動くとき、滞在者の当該動いた部分がフレーム間で撮像画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの撮像画像から短背景画像を生成し、背景生成部124が、滞在者がフレーム間で短背景画像における同一位置にいなくなるように設定されたフレーム数間引きした、複数フレームの短背景画像から背景画像を生成し、変化検出部125が、短背景画像と撮像画像の差分から変化抽出画像を生成する。そして、継続検出部126が、短背景画像と背景画像の差分から継続抽出画像を生成し、滞在者検出部122が、変化抽出画像と、継続抽出画像から監視対象者である滞在者の状態を示す情報を算出する。
(もっと読む)
車両周辺監視装置
【課題】単眼カメラによる距離検出と単眼カメラ以外の構成による距離検出とを切替えて、車両周囲の対象物の位置を追跡するときに、対象物の距離検出の信頼性が低下することを防止した車両周辺監視装置を提供する。
【解決手段】単眼距離検出部11による検出距離が切替距離以下になった後は、ステレオ距離検出部12により車両1と対象物間の距離を検出して対象物の位置を追跡し、走行状況検知部15により検知されている車両1の走行状況が、単眼距離検出部11による距離検出精度を低下させるおそれがある精度低下懸念状況であるときは、切替距離hを、精度低下懸念状況でないときよりも長く設定する対象物位置追跡部13を備える。
(もっと読む)
表面パターンの検出方法及び装置
【課題】本実施形態では、検査対象物が各種のものであっても、柔軟に対応して検査目的を達成できる表面パターンの検出方法及び装置を提供する。
【解決手段】この実施例では、予め撮像した参照用検査対象物の撮像信号に基づく参照用パターンデータを用意し、検査用対象物を撮像した撮像信号に基づくリアル撮像パターンデータを取得し、前記リアル撮像パターンデータを前記検査用対象物のリアル速度情報に基づき圧縮及び又は伸張して修正パターンデータを生成し、前記修正パターンデータと前記参照用パターンデータを比較して、類似か非類似を判定し、判定結果を示す信号を出力する。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
車両周辺表示装置
【課題】 本発明は、ユーザによる手動操作を必要とすることなく、表示装置に表示されるカメラ映像の視点を変更することができる車両周辺表示装置の提供を目的とする。
【解決手段】 本発明は、車両周辺をカメラにて撮影し、前記カメラからのカメラ映像を車室内の表示装置に表示する車両周辺表示装置において、運転者の着座姿勢に応じて、カメラ映像の視点を変更することを特徴とする。
(もっと読む)
車外映像提供システム
【課題】車外映像を利用した車室内における高品質なAR表示を実現することができる「車外映像提供システム」を提供すること。
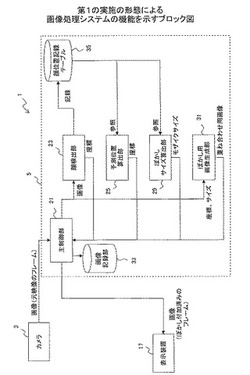
【解決手段】車載機3は、携帯端末2から、カメラ5の向きに関する情報を含む端末情報を取得する端末情報取得手段11と、端末情報に対応した車載カメラ4および撮影領域中の部位を特定する車載カメラ/撮影領域部位特定手段12と、これによって特定されたカメラ4の撮影映像から、特定された撮影領域中の部位に該当する映像部位を切り出す映像部位切り出し手段14と、切り出された映像部位に対して、提供すべき車外映像の生成に必要な画像処理を行う画像処理手段15と、車両上の撮影障害物を含まないAR表示映像を生成する提供映像生成手段16とを備えたこと。
(もっと読む)
撮像装置
【課題】光学フィルタを通じて撮像した撮像画像に対して画像処理を行って互いに異なった光学成分を抽出して光学成分抽出画像を生成する場合に必要となる演算パラメータのデータ量を少なくすることを課題とする。
【解決手段】全単位画素(1pixel)に対応する演算パラメータのうち、全単位画素を3以上の単位処理領域に区分したときに互いに離間した2つの単位処理領域A,B,E,Fを構成する単位画素に対応した演算パラメータは予め記憶しておき、これらの単位処理領域の間に位置した特定単位処理領域α,β,γを構成する単位画素についての演算パラメータは、予め記憶せず、当該特定単位処理領域を挟み込む単位処理領域についての演算パラメータを用いた補間処理により生成する。
(もっと読む)
車両周辺監視装置
【課題】ピッチ検出器を用いることなく、単眼カメラによる構成においてもピッチング補正を行うことができる機能を備えた車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置は、所定の制御周期毎に、車両に搭載されたカメラによる撮像画像を取得し、今回の制御周期での撮像画像の前回の制御周期からの変位量を算出し、該変位量を用いて車両の挙動に起因する撮像画像の変位分を相殺するためのピッチング補正値を算出し、今回の撮像画像に対して、ピッチング補正値による補正を行った補正画像を生成し、補正画像から対象物を検出する。変位量は、撮像画像から、地平線より上側の所定領域、地平線を含み地平線より下側から上側までの所定領域、又は自車両から所定距離内の先行車両を含む所定領域を監視領域として切出し、今回の制御周期における撮像画像の監視領域と前回の制御周期における撮像画像の監視領域間で求める。
(もっと読む)
監視装置、監視方法およびプログラム
【課題】画面表示された移動体の経路上の指定した場所から映像を再生する。
【解決手段】監視装置10は、移動体の動きを検出する動き検出部22と、検出した動きの特徴に基づいて検出ポイントを設定するとともに、その検出ポイントにおける移動体の位置と録画時刻とを含む経路情報を生成する経路生成部23とを備え、経路情報を参照して、検出ポイント間を結ぶ線を移動体の経路として表示装置130の画面上に表示する。さらに、監視装置10は、前記経路上の位置を指定する入力を受け付けて、指定された位置と検出ポイントとの位置関係に基づいて録画時刻を算出する時刻算出部25を備え、指定した位置に対応する録画時刻から映像を再生する。
(もっと読む)
監視カメラシステム及び監視方法
【課題】高画質の再生やライブ画像の巻戻しが手軽にでき、かつデータ量が小さく低コスト化を可能とする監視カメラシステム及び監視方法を提供すること。
【解決手段】静止画を撮影するカメラ群にネットワークを介して接続されたサーバが、一定時間毎に、前記カメラ群からTCP/IP方式で、カメラ画像をJPEG形式の静止画で取得し、一定期間内は静止画で保存し、一定期間経過後に圧縮動画ファイルに変換して保存し直すことを特徴とする。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
信号機認識装置、候補点パターン送信装置、候補点パターン受信装置、信号機認識方法、及び候補点パターン受信方法
【課題】前方画像中における信号機の認識を高い精度と処理速度で実現する。
【解決手段】前方画像中で赤色点で認識される複数の信号候補点P1〜P5を検出し、そのうち赤色点の消灯とともに近傍位置での青色点の点灯が認識される信号確定点P2を検出し、これら信号確定点P2と複数の信号候補点P1,P3〜P5間の幾何的な配置関係を解析した候補点パターンデータを生成、記憶する。同じ交差点に対する同じ進入方向に対応してあらかじめ生成、記憶しておいた候補点パターンデータと、その時点で検出した信号候補点P1〜P5の集合に対して候補点パターンの配置と大きさを照合して当てはめることで、候補点パターンデータ中に設定された信号確定点P2に対応する信号候補点を、実際の信号機の表示位置を示す信号点として認識できる。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
61 - 80 / 2,156
[ Back to top ]