
Fターム[5C054EA05]の内容
閉回路テレビジョンシステム (47,623) | 処理系 (4,343) | 受像系 (2,156)
Fターム[5C054EA05]に分類される特許
21 - 40 / 2,156
画像信号処理装置
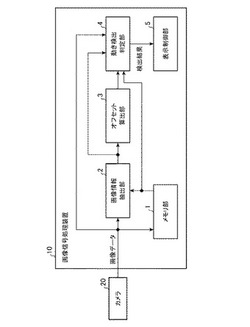
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
内視鏡装置

【課題】主光源からの照明光に補助光源からの光を導入して照明光の光量を増加させた場合でも、観察画像の色味が変化することなく、常に明るい画像が得られる内視鏡装置を提供する。
【解決手段】内視鏡装置は、中心波長が互いに異なる第1、第2の照明光を生成する主光源33と、第2の照明光と実質的に同一の中心波長を有する第3の照明光を生成する補助光源45と、撮像手段と、光量制御手段と、第1の照明光の光量に対する第2、第3の照明光の合計光量の光量比に応じて観察画像を色味補正する色味補正手段とを備える。光量制御手段は、目標光量が主光源による最大出力光量となるまでは主光源により光量制御し、目標光量が主光源の最大出力光量を超える場合には、主光源を最大出力光量に維持したまま第3の照明光を導入して光量制御する。色味補正手段は、第3の照明光の導入によって光量比が変化する場合に観察画像の色味を補正する。
(もっと読む)
制御装置および制御方法
【課題】制御装置は、監視カメラやモニタ等、複数の機器を複数のポートでそれぞれ接続している。そのため、ポートから異常が発生した場合には、そのポートとの通信が滞り、そのポートの処理とは無関係な他のシリアル通信等の処理を遅延させてしまうことがあり、この様な場合には制御装置を再起動させることにより対応していた。
【解決手段】異常のあるユニット・ポートの処理を実施せず、ソフト的に切り離して全体の処理を実行することで、いずれのポートから障害が発生しても、他の処理に影響を及ぼさず、制御装置を再起動することなくシステム運用を継続させる。また、ポートに係る障害が復旧した場合には、特別な処理をせずとも、復旧したユニット・ポートに係る処理を再開する。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
運転支援装置
【課題】立体表示された走行予想軌跡線の下枠線と上枠線の関係を直感的に判断することのできる運転支援装置を提供することを目的とする。
【解決手段】撮像装置7から入力された自車両外部の撮像画像に不揮発性メモリ4から読み出された自車両の立体的な走行予想軌跡線30を重畳して外部の表示装置12に出力する映像処理装置3と、ステアリングセンサ10から入力されたハンドル角度信号に基づいて、映像処理装置3が重畳する立体的な走行予想軌跡線30の向きを制御する制御手段5とを備え、走行予想軌跡線30は、立体の下面側を示す第1の軌跡線31と立体の上面側を示す第2の軌跡線32とを有し、かつ、立体側面33を第1の軌跡線31と前記第2の軌跡線32で挟まれた空間で構成し、制御装置5は、映像処理装置3に、走行予想軌跡線30の立体側面33の色の濃度を高さ方向に向けて段階的に変化させる。
(もっと読む)
情報処理装置、制御方法、情報処理システム、プログラム
【課題】監視カメラが操作されたとしても設定されたマスキング領域からプライバシー画像が外れることを防ぐ。
【解決手段】カメラで撮影可能な撮影範囲内においてマスキングする対象とされるマスキング領域の指定を受け付ける受付手段と、カメラで撮影された撮影画像において、受付手段により指定を受け付けたマスキング領域が配置される位置を判定する判定手段と、判定手段により判定された配置位置に応じて、マスキング領域を分割するかを判定する判定手段と、判定手段よる判定の結果、マスキング領域を分割するとの判定がなされた場合、マスキング領域を所定の数に分割する分割手段と、分割手段により分割された複数のマスキング領域を、撮影画像上に配置する配置手段と、配置手段により複数のマスキング領域が配置された撮影画像を配信する配信手段とを有する。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
画像表示装置及び画像表示方法
【課題】移動体に搭載された画像表示部に対するドライバの視認性が下がることを抑制しつつ、同画像表示部に表示障害が発生した場合においても、同画像表示部に表示すべき画像をドライバに対して表示することが可能な画像表示装置及び画像表示方法を提供する。
【解決手段】
移動体に搭載された表示部110に画像を表示する表示手段と、前記移動体内に存在する通信端末機器130を検知する端末機器検知手段と、前記端末機器検知手段により前記移動体内に通信端末機器130が検知された場合に、前記移動体に搭載された表示部110に表示すべき画像を、前記通信端末機器の表示画面に表示する通信制御手段と、を備えることを特徴とする画像表示装置10。
(もっと読む)
色調調整装置および電子内視鏡装置
【課題】照明用光源の経時的な分光分布の変化による撮影画像の色調変化を防止する。
【解決手段】光源21の光を照明として撮像素子14において画像を撮影し、前段映像信号処理回路18において撮影画像のホワイトバランスを調整する。光源21からライトガイド22に至る光路上にビームスプリッタ31を配置し、光源21の光束の一部を受光センサ32において受光する。受光センサ32で実測された3刺激値とメモリ34に記録された3刺激値の基準値とを比較し、光源21の分光分布変化を検出する。これに基づきホワイトバランス処理におけるR、Bゲインを補正し、分光分布が変化したことによる撮影画像の色調の変化を防止する。
(もっと読む)
車両周辺監視装置
【課題】俯瞰画像上で全体が表示されていない目標物に対し、俯瞰画像上の境界線を変更し全体を表示できるようにした車両周辺監視装置を提供すること。
【解決手段】複数の撮像装置が互いに共通する視野領域とする俯瞰画像の共通領域に位置する障害物と判定された画像から抽出された複数の特徴点に対し、三次元計測処理部43において得られた相対運動情報による一定の経過時間を想定したときの予想軌跡と時刻変化をもとに、前記共通領域を互いに共通する視野領域とする各カメラについて“前記特徴点が写る/写らない”を予測しその予測結果を得る。そして、前記予測結果から、前記俯瞰画像の共通領域について、前記特徴点が抽出された障害物131をより広範囲に写すことの可能なカメラによる部分俯瞰画像を優先させ、フィードフォワード的に俯瞰画像の繋ぎ目、境界線を変更し、障害物131がより広範囲に俯瞰画像に表示されるようにする。
(もっと読む)
車両周辺監視装置
【課題】本発明は、画像認識における誤検出、あるいは、不検出の発生時、発生要因のデータを学習し、誤検出や不検出を繰り返さず、認識精度を向上することができる車両周辺監視装置を提供する。
【解決手段】撮影手段1で入力された画像に対して、対象物検出処理部3によって検出された対象物について、誤検出、あるいは、不検出の場合、ユーザ入力手段6により出力手段7上で該当領域を指定する。画像認識DB修正部4は、誤検出領域の辞書データを修正し、修正したデータを画像認識DB5の辞書データに格納する。
(もっと読む)
監視装置、監視方法および監視プログラム
【課題】最も拡大画像の撮像対象とする必要のある人物を、より確実に撮像することができる監視装置、監視方法および監視プログラムを提供する。
【解決手段】第1撮像部1により撮像された第1画像に含まれる人物の行動評価値Nを算出し、算出した行動評価値Nに基づいて、第2画像を撮像する第2撮像部2の撮像対象を決定する演算処理部20と、演算処理部20により決定された撮像対象が第2画像に含まれるように第2撮像部2を調整する制御部23と、を備え、演算処理部20は、第2撮像部2による第2画像の撮像と並行して、第1撮像部1により第1画像が新たに撮像されると、新たに撮像された第1画像における行動評価値Nを再び算出して撮像対象を更新し、制御部23は、演算処理部20により撮像対象が更新されると、更新された撮像対象の第2画像が撮像されるように第2撮像部2を調整する。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法
【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
画像受信装置
【課題】ホームセキュリティシステム等に適用される画像受信装置において、画像データが高い圧縮率で送信され、且つ、監視対象となる被写体の背景に移動体が写り込んでいる場合であっても、移動体に起因する引きずりノイズを低減させる。
【解決手段】画像送信装置1から高い圧縮率で送信された現フレーム41の画像データと前フレーム40の画像データを比較し、画像データが変化し、かつ、所定の条件を満たす監視対象領域42及び監視対象領域42以外の領域であって、画像データが変化した領域を含む置換対象領域43を抽出し、現フレーム41の画像データにおける置換対象領域43の画像データを、前フレーム40の画像データにおける置換対象領域43の画像データに置き換えて再生する。
(もっと読む)
動画像表示装置、動画像表示方法、プログラムおよび動画像処理表示システム
【課題】マシンへの負荷を抑制しつつ、ユーザが見たいアングルの動画像にリアルタイムに切り替えることができる動画像表示装置、動画像表示方法、プログラムおよび動画像処理表示システムを提供すること。
【解決手段】時間・アングル動画像データから、時間情報の時間順に時間情報とアングル情報とに対応するフレームをフレームごとに読み出す読み出し手段232と、時間情報の時間順にフレームごとに表示する表示手段24と、動画像のアングル切り替え指示を入力する指示入力手段と22とを備え、読み出し手段232は、指示入力手段22が指示座標内において隣り合う前記アングル情報を超えてアングル切り替えの指示を連続して入力すると、当該入力時の時間情報と、切り替え指示されたアングル情報とに対応するフレームを連続して読み出し、表示手段24は、読み出し手段232によって読み出されたフレームに連続して切り替えて表示することを特徴とする。
(もっと読む)
撮像装置および撮像素子駆動方法
【課題】撮影動作中に暗電流を簡略な構成で高精度に検出する。
【解決手段】CCD15における第1画面の読み出しにおいて、フォトダイオード30の電荷を垂直CCD31に転送し(図3(a))、黒丸で示される上部垂直オプティカルブラック領域の電荷信号を残して垂直転送を停止する(図3(c))。第2画面の撮影を行い、フォトダイオード30の電荷を垂直CCD31に転送することにより、黒丸で示される下部垂直オプティカルブラック領域の電荷信号を、第1画面の読み出しにおいて残され、斜線が施された丸で示される上部垂直オプティカルブラック領域の電荷信号に加算する(図3(d))。加算された電荷信号からCCD15の暗電流を検出する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】オートアイリスによる背景画像からの現画像の輝度変化量を基に作成した輝度補正値に基づいて現画像を輝度毎に補正するときに、背景領域に侵入した異物に起因する適正でない輝度補正値を除去する。
【解決手段】画像処理装置は、まず背景画像の各輝度について、現画像との輝度差分値の度数を算出する(図3A)。次に背景画像の各輝度の画素数と各輝度の現画像との差分値の合計を用いて背景画像の各輝度の現画像との輝度差分の平均値を算出し、この平均値を基に、仮の補正テーブルを作成する(図3B)。次に近似関数及び係数を設定し、関数に仮の補正テーブルの輝度値及び輝度補正値を代入し、係数を未知数とした方程式を解いて係数を求める。求めた係数と近似関数を用いて、補正テーブルを作成する(図3C)。
(もっと読む)
内視鏡装置
【課題】接続されるビデオスコープに適した画像信号処理回路を、煩雑な作業を伴わずに自動構築する。
【解決手段】ビデオスコープ10内にコンフィギュレーションデータを格納したメモリ17A、17Bを設け、プロセッサ20には、FPGAによってプログラミング構築される画像信号処理回路22を設ける。そして、ビデオスコープ10がプロセッサ20に接続されると、PAL方式、もしくはNTSC方式に対応したコンフィギュレーションデータをプロセッサ20に送信し、画像信号処理回路22を構成する。
(もっと読む)
動体検出装置及びその制御方法、プログラム
【課題】 振動のある環境下においても、振動が終了するのを待たずに、かつ、少ない計算機資源を用いて、動体検出を行うことである。
【解決手段】 撮像画像から動体を検出するための動体検出処理を実行する。撮像画像に基づいて、前記撮像装置に起因する振動を検出する。振動を検出した場合、動体検出可能な位置までワイド側に現在のズーム位置を移動する。
(もっと読む)
21 - 40 / 2,156
[ Back to top ]