
Fターム[5C054EA05]の内容
閉回路テレビジョンシステム (47,623) | 処理系 (4,343) | 受像系 (2,156)
Fターム[5C054EA05]に分類される特許
81 - 100 / 2,156
画像処理装置、画像処理方法、およびプログラム
【課題】監視カメラに対する妨害行為を検出できるようにする。
【解決手段】画像の画像データを取得し、取得された画像をN(N>1)個のブロックに分割し、新たな画像の画像データが取得される毎に、N個のブロックのうちのM(N≧M>1)個のブロックを、更新対象のブロックとして順次指定し、指定されたM個のブロックの画像データに所定のフィルタによるフィルタリングを施し、フィルタリング結果が、所定の値より大きい画素をカウントし、カウントされた画素の数と所定の値を比較することで、ブロックに異常があるか否かを判定し、異常があると判定された画像内のブロック数と所定の値を比較することで、妨害が発生したか否かが判定される。本技術は、例えば、監視システムに適用できる。
(もっと読む)
画像表示方法および装置

【課題】蛍光画像などの特殊画像を表示する画像表示装置において、特殊画像における発光部分の被観察部における位置を正確に把握でき、かつ発光部分の階調などの情報を正確に表した画像を表示する。
【解決手段】可視光の被観察部への照射によってその被観察部から発せられた光に基づく可視画像と可視光とは異なる波長帯域の特殊光の被観察部への照射によってその被観察部から発せられた光に基づく特殊画像とを取得し、可視画像が有する画像情報のうちの一部の情報を抽出して抽出画像を生成し、その生成した抽出画像を特殊画像上に重ね合わせた重ね合せ画像を生成し、その生成した重ね合せ画像を表示する。
(もっと読む)
車両用包囲視野システム
【課題】車両用包囲視野システムの提供。
【解決手段】車両用包囲視野システムであって、車両の異なる位置に提供される複数の画像センサであって、車両の完全な周囲を網羅する車両周囲の画像データを生成する、画像センサと、複数の画像センサの画像データを処理する画像処理ユニットであって、画像処理ユニットは異なる画像センサの画像データに基づき包囲視野を生成するように構成され、画像処理ユニットは車両包囲視野を生成するために車両を包囲するボウル上に画像データを逆に投影し、画像処理ユニットは仮想ユーザ車両視野を生成するために車両包囲視野が観測される仮想カメラ場所を使用するように構成される画像処理ユニットと、仮想カメラ場所を少なくとも水平方向に変更することを可能にし、視野方向を変更することを可能にする、制御ユニットと、を備える、車両用包囲視野システム。
(もっと読む)
画像生成装置及び画像表示システム
【課題】車両の走行速度が所定の閾値より低い場合に周辺画像を表示させるときに、表示モードの切り替え無しに車両の周辺の必要な領域の状況をユーザに提供する。
【解決手段】画像表示システムでは、車両9の走行速度が所定の閾値より低くなりフロントモードM1に移行すると、フロントモードM1の開始時点では車両9の前方領域及び側方領域の双方を同時に表示可能な汎用性の高い前側方モードM11とされる。前側方モードM11で示される画面は、交差点への進入、すれ違い、幅寄せなどの想定される様々な状況に対応可能であることから、ユーザは表示モードを切り替えることなく、車両9の周辺の必要な領域の状況を確認することができる。
(もっと読む)
動画提示装置
【課題】歪曲広角画像上で任意の追跡対象物を自動追跡する。
【解決手段】魚眼撮影した歪曲広角画像Sを、メモリ130内にフレーム単位で入力する。変換部150は、格納部170内の切出条件に基づき、歪曲画像Sの点Pの位置から、φで示される向きに、サイズmの画像を切り出し、正則画像Tに変換してメモリ140に格納する。追跡開始点Qを含む追跡開始指示が与えられると、フラグ設定部220はフラグをONにし、点Qが新たな点Pになるよう更新する。基準色抽出部200は、新たな点Pの近傍色を基準色αとして抽出し、基準色格納部190に格納する。近隣ブロック抽出部160は、点Pの近傍ブロックを抽出し、ブロック選択部180は、基準色αに近似する画素数が最大となるブロックを選択する。自動変更部210は、選択ブロック内の基準色αに最も適合する色をもつ候補領域の中心点を新たな点Pとする更新を行う。
(もっと読む)
周辺画像表示装置
【課題】
撮像される画像同士の位置関係と、さらに、撮像される物体と建設用機械の上部旋回体の方向または下部走行体の前進方向との位置関係と、に関する情報を的確に得ることができる周辺画像表示装置を提供することを目的とする。
【解決手段】
建設用機械の周囲を撮像し、表示手段3は、建設用機械を基準とした環状画像31と、パノラマ画像32と、パノラマ画像32の一部分を切り出した切出し画像33とを同時に表示し、切出し画像33の切出し位置を定める枠状画像A1,A2を環状画像31上及びパノラマ画像32上に重ねて表示させ、建設用機械の上部旋回体の方向を指示する上部旋回体指示画像311,321,331と、下部走行体の前進方向を示す前進方向指示画像313,323,333と、を少なくとも環状画像31またはパノラマ画像32または切出し画像33のいずれかに表示させる。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】動体検出部は、現画像において、背景とは異なる部分の画像である動体を検出し、一時停止判定部は、動体が、所定の一定時間以上停止しているかどうかを判定する。信頼度処理部は、一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とを用いて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度を求める。不動体検出部は、不動体信頼度に基づいて、現画像から、不動体を検出する。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
撮像装置及びこれを備えた物体検出装置、並びに、光学フィルタ及びその製造方法
【課題】光量が大きく異なっている複数の光源体をより短い時間間隔で連続して検出することを課題とする。
【解決手段】撮像領域内に存在する物体からの光を、光学フィルタを介して、受光素子(撮像画素a,b,c,・・・)が2次元配置された画素アレイで構成された画像センサにより受光することで、撮像領域内を撮像する撮像装置において、上記光学フィルタは、透過率が低い光透過領域(撮像画素b,d,e,gに対応したフィルタ領域)と透過率が高い光透過領域(撮像画素a,c,f,hに対応したフィルタ領域)が、撮像画素単位で、上記画素アレイの2次元方向へ交互に配置されている透過率調整層を有する。
(もっと読む)
車両用表示装置
【課題】電源ノイズを抑制しつつ、省スペースで車室内の複数個所に画像を表示することができる車両用表示装置を提供すること。
【解決手段】車室内に設けられ光を投射することによって画像を表示するものであって、半導体基板に形成されたミラー部13とミラー部13を駆動する第1の圧電振動板15a,15bなどを含む2次元スキャナ10と、ミラー部13に対して光を照射する半導体レーザ21〜23とを含むプロジェクター40を備え、運転者の視線方向に応じて画像を表示する領域を変更するようにプロジェクターを動作させるものであり、ステアリングホイールの回転角度が90°を超えた場合は、助手席側のドア又は助手席側のサイドガラスに設けられたスクリーン53、もしくは、ステアリングホイールの回転方向側のピラーに設けられたスクリーン51にプロジェクター40による画像を表示する。
(もっと読む)
車両周辺監視システム
【課題】複数の撮影画像から生成される俯瞰画像の重複領域に現れる物体の撮影方向に関する運転者の理解を容易にする車両周辺監視システムの提供。
【解決手段】部分的に重複させた撮影による複数の撮影画像から生成された俯瞰画像セグメントを、互いの重複領域を重ね合わせるように組み合わせて表示用俯瞰画像を生成する。俯瞰画像における重複領域に重複する撮影画像の境界領域を表す境界指標を付与した境界付き俯瞰画像が表示された後に、俯瞰画像における重複領域に予め設定された融合関係で融合して得られた融合重複画像を用いた融合俯瞰画像が表示される。
(もっと読む)
画像処理装置
【課題】異常動作の原因の特定やメンテナンス等に必要なデータを容易に取得可能になる画像処理装置を提供する。
【解決手段】画像処理装置1は、処理部10の異常を監視する診断部として機能する中央処理装置14を備えている。診断部としての中央処理装置14は、処理部10の異常動作を検知する異常検知部18と、処理部10が保持しているデータの少なくとも一部を、抽出データとして外部装置に出力するデータ抽出部19とを有している。異常検知部18は、処理部10の異常動作の内容を所定の判定基準に基づいて「階層1」、「階層2」、「階層3」の3段階のエラーレベルに分類する。データ抽出部19は、エラーレベルが、予め定められたあるレベルに達すると、処理部10が保持しているデータの少なくとも一部を抽出データとして自動的に外部装置としての外部記憶装置3に出力する。
(もっと読む)
物体管理システム、物体管理方法およびプログラム
【課題】特定された固有の物体同士についての接触の可否を、撮像範囲内における接触していない物体や人物を考慮した上で判定することができる物体管理システムを提供する。
【解決手段】画像内の物体を検出する画像認識部114と、各物体の識別子および各物体に対する接触が許可されている他の物体の識別子を検出する物体データ記録部115と、各物体間の距離を検出する距離検出部116と、前記各識別子および距離を用いて許可されていない物体の接触を判定する接触可否判定部117と、を備えている。
(もっと読む)
画像処理装置
【課題】検査タクトが速い場合などでも、全ての画像を出力することが可能な画像処理装置を提供する。
【解決手段】画像処理装置1は、第1の出力部131から一部の出力画像を出力できない混雑状態にあるか否かを判断する判断部51と、判断部51の判断結果に応じて画像出力部13における出力画像の出力先を第2の出力部132へ切り替える退避処理部52とを有している。退避処理部52は、判断部51で混雑状態にないと判断されれば、出力画像の出力先を第1の出力部131とする通常モードを選択し、判断部51で混雑状態にあると判断されれば、出力画像の出力先を第2の出力部132とする退避モードを選択する。つまり、画像処理装置1は、混雑状態では出力画像を第1の出力部131ではなく第2の出力部132から外部記憶媒体4に出力することによって、出力画像を外部記憶媒体4に退避させる。
(もっと読む)
電子内視鏡装置
【課題】撮像と表示との同期を確保することができる電子内視鏡装置を提供する。
【解決手段】位相比較発振制御部156は、モニタ同期信号166と、プロセッサ側撮像クロック164との位相を比較し、比較結果に基づいて原振撮像クロック生成部154の発振を制御する。表示タイミング調整部152は、撮像用同期信号111とプロセッサ側撮像クロック164とモニタ同期信号166と表示クロック165とを用いて、デジタル画像信号110をモニタ同期信号166に同期して出力する。
(もっと読む)
画像処理装置および方法
【課題】簡単な構成で複数画像を同時に表示できるようにする。
【解決手段】1台のカメラにより撮影された画像からユーザの所定の向きの複数の画像を取得する取得部と、前記取得部により取得された複数の前記画像を鏡像として表示させるように統合する画像処理部とを備える。画像処理部は、実像の右側面画像を鏡像の左側面画像に変換し、実像の左側面画像を鏡像の右側面画像に変換し、実像の正面画像または背面画像を鏡像の正面画像または背面画像に変換し、それらを配置して表示させるように統合することができる。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
画像処理ユニット、および画像処理プログラム
【課題】生成する背景差分画像の精度の低下を抑えるとともに、装置本体にかかる処理負荷の増大も抑え、装置本体のコストダウンを図った画像処理ユニットを提供する。
【解決手段】メモリ4aは、代表画素毎に、その代表画素の特徴と、その代表画素の画素値の発生頻度をモデル化した背景モデルと、を関連付けて記憶する。画像処理部4は、画像入力部3に入力されたフレーム画像の画素毎に、その画素の特徴に対応する代表画素の背景モデルを探索する。画像処理部4は、この探索で得た背景モデルに基づき、背景が撮像されている背景画素、または背景でない物体が撮像されている前景画素のいずれであるかを判定する。画像処理部4は、画像入力部3に入力されたフレーム画像のいずれかの画素において、その画素が背景画素、または前景画素のいずれであるかの判定に用いた背景モデルを、この背景モデルを用いた画素の画素値に基づいて更新する。
(もっと読む)
複数カメラの校正方法及び校正システム
【課題】カメラ校正における場所的な要求や演算負荷の要求をできるだけ低減し、車両の組み立てラインに組み込むことが容易となる、複数カメラの校正技術を提供する。
【解決手段】第1校正場の所定位置に当該車両を位置決めし、第1カメラによる基本撮影画像を取得し、基本撮影画像における基本校正指標群の画像上の位置である基本画像座標を算定し、基本校正指標群のワールド座標と基本画像座標との関係を表す第1校正関数を算定する。第2校正場に移動し、第1カメラによる第1撮影画像から第1画像座標を算定し、第2カメラによる第2撮影画像から第2画像座標を算定し、第1画像座標及び第1校正関数及び第1校正指標群のワールド座標を用いて車両姿勢ずれを算定する。車両姿勢ずれと第2画像座標と第2校正指標群のワールド座標とに基づいて、第2画像座標と第2校正指標群のワールド座標との関係を表す第2校正関数を算定する。
(もっと読む)
車両周辺監視システム
【課題】各撮影画像から構成される車両周辺俯瞰画像において俯瞰画像セグメントの重複領域に現れる物体に対する運転者の視認性を改善する。
【解決手段】俯瞰画像セグメントの重複領域を予め設定された融合関数で融合して融合重複画像が生成される。融合関数は、重ね合わされる一方の撮影画像の撮影視野限界線と他方の撮影画像の撮影視野限界線との交点である基準点周りの角度に基づいて、または、一方の撮影画像の撮影視野限界線からの距離である第1パラメータと他方の撮影画像の撮影視野限界線からの距離である第2パラメータとに基づいて、あるいは、一方の撮影画像の撮影点と他方の撮影画像の撮影点とからの離散度に基づいて、重複領域における一方の撮影画像の画素成分と他方の撮影画像の画素成分との融合割合を導出する。
(もっと読む)
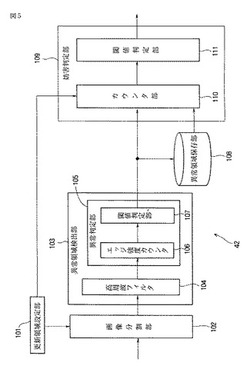
検知装置、検知方法及びプログラム
【課題】動きのある人等と動きが静止した物とを容易に判断する。
【解決手段】動体・不動体検出部106は、撮影部102により撮像された画像データから不動体領域を検出する。不動体拡大映像供給部109は、動体・不動体検出部106により検出された不動体領域を拡大させる。動体・不動体検出部106は、拡大された前記不動体領域を用いて動体又は不動体を検知する。
(もっと読む)
81 - 100 / 2,156
[ Back to top ]