
Fターム[5C054FD01]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005)
Fターム[5C054FD01]の下位に属するFターム
立体像;パノラマ画像 (203)
座標変換 (695)
Fターム[5C054FD01]に分類される特許
1 - 20 / 107
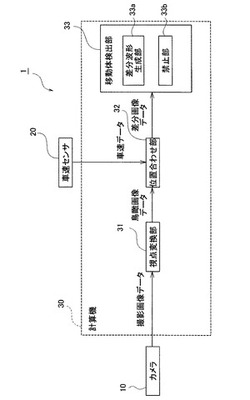
移動体検出装置及び移動体検出方法
【課題】移動体の検出精度を向上させることが可能な移動体検出装置及び移動体検出方法を提供する。
【解決手段】移動体検出装置1は、カメラ10による撮像にて得られた異なる時刻の画像データを、鳥瞰視上で位置を合わせる位置合わせ部32と、位置合わせ部32により位置合わせされた異なる時刻の画像データの差分画像データに基づいて、自車両周囲の移動体を検出する移動体検出部33とを備えている。また、移動体検出部33は、検出領域の画像を鳥瞰視に視点変換した際に立体物が倒れ込む方向に沿って、差分画像データ上において所定の差分を示す画素数をカウントして度数分布化することで差分波形を生成する差分波形生成部33aと、差分波形生成部33aにより生成された差分波形の大きさが所定以上である場合、移動体検出部33による移動体検出を禁止する禁止部33bとを有する。
(もっと読む)
車両用包囲視野システム

【課題】車両用包囲視野システムの提供。
【解決手段】車両用包囲視野システムであって、車両の異なる位置に提供される複数の画像センサであって、車両の完全な周囲を網羅する車両周囲の画像データを生成する、画像センサと、複数の画像センサの画像データを処理する画像処理ユニットであって、画像処理ユニットは異なる画像センサの画像データに基づき包囲視野を生成するように構成され、画像処理ユニットは車両包囲視野を生成するために車両を包囲するボウル上に画像データを逆に投影し、画像処理ユニットは仮想ユーザ車両視野を生成するために車両包囲視野が観測される仮想カメラ場所を使用するように構成される画像処理ユニットと、仮想カメラ場所を少なくとも水平方向に変更することを可能にし、視野方向を変更することを可能にする、制御ユニットと、を備える、車両用包囲視野システム。
(もっと読む)
作業車両の周辺監視装置
【課題】本発明の課題は、作業車両の走行時に作業車両の位置をオペレータが容易に認識することができる作業車両の周辺監視装置を提供することにある。
【解決手段】周辺監視装置の俯瞰画像作成部は、作業車両1が停止状態であるときには、第1仮想投影面31を用いて俯瞰画像を作成する。第1仮想投影面31の少なくとも外縁部は、作業車両1から遠ざかるほど地面からの高さが高くなる形状である。作業車両1が走行状態であるときには、俯瞰画像作成部は、第2仮想投影面32を用いて俯瞰画像を作成する。第2仮想投影面32の少なくとも外縁部は、地面からの高さが一定の平坦な形状である。
(もっと読む)
運転情報記録装置及び車両周囲画像再現システム
【課題】俯瞰画像関連の画像データの有効活用が図れる技術を提供する。
【解決手段】ドライブレコーダ30は、自車両の走行中に発生し得る所定種類のイベントの発生を監視し、発生したことを検出したイベントの内容及び発生時間を示す情報を記録媒体(メモリカード)50に記録する機能、自車両に取り付けられている複数台のカメラからの複数の画像データに基づき自車両周辺についての俯瞰画像を表す画像データを繰り返し生成する俯瞰画像生成装置20から、俯瞰画像を表す画像データ、複数台のカメラからの複数の画像データ及び俯瞰画像を表す画像データの生成過程で生成される画像データの中の少なくとも1種の画像データを繰り返し取得する機能、取得した各画像データを、各画像データの生成時刻が分かる形で記録媒体50に記録する機能を有する。
(もっと読む)
外因パラメータのみのサラウンドビューカメラ自動較正
【課題】複数のカメラを備えているカメラシステムを較正する方法を提供すること。
【解決手段】所定の固有較正を有する複数のカメラを備えているカメラシステムを較正する方法であって、カメラは、車両などの物体に備え付けられ、物体の周囲をカバーする、方法は、(a)既知の寸法だけ間隔を空けて置かれ、物体の周囲およびカメラの視野内における単一の平面に位置を定められる一セットのマーカの位置を決めるステップと、(b)カメラのためのそれぞれのセットのマーカからカメラの外因パラメータを計算するステップと、(c)複数のカメラのうちのその他のカメラの各々に対してステップ(a)および(b)を繰り返すステップとを包含する、方法。
(もっと読む)
監視範囲検知装置
【課題】携帯端末の位置や姿勢などに応じて画定される方向・範囲内に、監視装置の監視範囲が存在するか否かを検知可能とする。
【解決手段】撮像部と、撮像部の位置と光軸を取得する状態取得部と、監視場所を3次元仮想空間として表現した場所モデルと、監視装置の設置位置、監視方向及び監視角情報を場所モデルと対応付けた監視条件情報と、撮像部の位置、光軸及び画角を場所モデルと対応付けた撮像条件情報とを記憶した記憶部と、場所モデルと監視条件情報とから監視装置の監視範囲を表す監視範囲モデルを生成し、場所モデルと撮像条件情報とから撮像部の撮像範囲を表す撮像範囲モデルを生成するモデル生成手段と、監視範囲モデルと撮像範囲モデルとが交わっているときに撮像部の視野内に監視装置の監視範囲が含まれていると判定する判定手段と、判定手段による判定結果を表示する表示部と、を有することを特徴とする監視範囲検知装置。
(もっと読む)
画像処理装置、画像処理方法、及び、プログラム
【課題】短時間で三次元モデルを作成する。
【解決手段】三次元モデリング部304は、キーフレーム記憶部303に数フレーム周期毎に記憶されているペア画像から三次元モデルを作成する。また、特徴点検出部306は、キーフレーム記憶部303に記憶されている画像の特徴点を検出する。そして、位置変化推定部308は、検出した特徴点が最新画像内においてどの位置に変化したかを推定し、推定した結果に基づいて、作成した三次元モデルを最新画像に対応した三次元モデルに変換するための変換パラメータを算出する。そして、再構成部311が、フレーム周期毎に、算出された変換パラメータを用いて作成した三次元モデルを再構成し、画像出力部314が表示装置10に表示させる。
(もっと読む)
画像監視装置
【課題】現在表示している撮像画像上に監視部の監視範囲を再現することにより、監視者が監視場所の状況を迅速に把握しうることを目的とする。
【解決手段】撮像部と、監視部と、場所モデルと監視条件情報と撮像条件情報とを記憶した記憶部と、画像処理部と、表示部とを備えた画像監視装置であって、画像処理部は、監視条件情報と場所モデルとを用いて監視部の監視範囲を表す監視範囲モデルを生成し、監視範囲モデルと場所モデルと撮像条件情報とを用いて撮像部の視野に相当するレンダリング画像を生成し、撮像画像とレンダリング画像とを合成することにより監視部の監視範囲を表した合成画像を出力することを特徴とした。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
対象物画像判定装置
【課題】三次元空間での対象物の像の存在を判定する対象物画像判定装置において、撮像される画像毎に投影処理を行い設置物による非隠蔽部分を求めるのは処理負荷が大きい。
【解決手段】時刻毎に画像から対象物像を抽出する動作に際し事前処理を行い、空間内での対象物の位置のうち画像において対象物が設置物により隠蔽される隠蔽位置を特定した隠蔽マップ42、カメラへの投影条件に基づいて設置物、及び空間内の各位置での対象物それぞれの立体モデルを投影した設置物モデル像44、対象物モデル像43を求め、記憶部4に格納する。隠蔽状態推定部54は、隠蔽マップ42を参照し、対象物の候補位置が隠蔽位置であれば当該候補位置に対応する対象物モデル像43から設置物モデル像44の領域を除いて対象物可視領域とする。尤度算出部55及び物体位置算出部56は、画像における対象物可視領域の画像特徴から対象物の像の存在を判定する。
(もっと読む)
通行車両監視システム及び車両用監視カメラ
【課題】設置が容易で、火災時においても、火災の位置及びその周囲の状況を正確に認識する。
【解決手段】通行車両監視システム1は、数珠繋ぎに接続され、車両の通行状況を撮像する複数の監視カメラ2と、複数の監視カメラに接続されたセンタ装置4とからなる。各監視カメラ2は、通常撮影用の複数の第1の撮像部21nと、赤外撮影用の1つ以上の第2の撮像部21rと、複数の画像から距離画像のデータを生成する立体計測部23と、距離画像に基づく基本監視部24と、メモリ27と、距離画像に基づいて認識された車両の識別情報を生成して、その識別情報と、その認識された車両についての時刻情報とを含む情報を記憶部に記録する計測及び記録処理部と、距離画像に基づいて、基本監視部とは別の監視処理を実行する追加監視部25と、第1の撮像部において得られた複数の画像から生成された距離画像に基づいて、第2の撮像部を起動する判定部26と、を有する。
(もっと読む)
不審対象検知システム、不審対象検知装置、不審対象検知方法及びプログラム
【課題】異なる特性を有する画像処理方法の結果を統合的に利用し、特にセキュリティレベルに応じた有効な不審者検知処理を行なうことができる不審者検知システムを提供することにある。
【解決手段】実施形態によれば、不審者検知システムは、監視範囲内の監視対象を撮影する複数のカメラと、前記各カメラから出力される映像を画像処理する手段であって、異なる検出特性を有する複数の画像処理部と、前記各画像処理部からの画像処理結果のいずれか、あるいは当該各画像処理結果を統合した統合処理結果を使用して前記監視対象の挙動を検知する検知部と、前記検知部から出力される挙動情報に基づいて、前記監視対象が不審者であるか否かを判定する判定部とを具備し、前記複数の画像処理部は、前記各カメラから出力される映像を単眼画像処理する単眼画像処理部と、前記各カメラから出力される映像をステレオ画像処理するステレオ画像処理部とを含む構成である。
(もっと読む)
行動監視システム、行動監視プログラム、及び行動監視方法
【課題】監視対象が多数の場合であっても、監視対象の識別及び行動把握を容易に行うことができる行動監視システム、行動監視プログラム、及び行動監視方法を提供すること。
【解決手段】監視対象Tの光学像が入力される撮像部、監視対象Tと背景とを分離して監視対象Tの各特徴量を算出する特徴量算出部、特徴量から監視対象Tの各移動軌跡を算出する移動軌跡算出部、監視対象Tの所定部位の3次元位置座標を算出する位置座標算出部、所定部位の3次元位置座標に基づき、所定部位の移動速度及び移動方向を算出、所定部位の各動作軌跡を算出する動作軌跡算出部、特徴量及び3次元位置座標がステレオカメラ4間で類似する移動軌跡を繋げて、監視対象T毎の統合移動軌跡を生成する移動軌跡統合部、特徴量及び3次元位置座標がステレオカメラ4間で類似する動作軌跡に対して、監視対象T毎の統合動作軌跡を生成する動作軌跡統合部、を備えている。
(もっと読む)
映像投影システムおよび映像投影プログラム
【課題】 動体に設けられた立体スクリーンに対して、被投影体の映像を整合させ自動的に追従することができる映像投影システムおよび映像投影プログラムを提供する。
【解決手段】 動体2に設けられた立体スクリーン3に映像投影装置13から所定の映像を投影する映像投影システム1であって、立体スクリーン3の位置情報および方向情報を取得する立体スクリーン情報取得部35と、立体スクリーン3に投影しようとする被投影体4の2次元映像をテクスチャとして、被投影体4の3次元モデルを作成する3次元モデル作成部32と、立体スクリーン情報取得部35が取得した立体スクリーン3の位置情報および方向情報に基づいて、被投影体4の位置、大きさおよび方向を立体スクリーン3に整合させた投影映像を3次元モデルから作成する投影映像作成部36と、投影映像作成部36が作成した投影映像を映像投影装置13に出力する投影映像出力部37とを有する。
(もっと読む)
双魚眼方式全方位パノラマ動画ライブ配信システム
【課題】水平画角360度・垂直画角180度の全方位パノラマ動画を簡便にライブ配信し、実時間で閲覧するための技術が存在しないという点。
【解決手段】既存のクロス・プラットフォーム・ライブ動画配信システムを基礎にして、双魚眼全方位パノラマレンズを利用して撮影された水平画角360度・垂直画角180度の全方位パノラマ動画、すなわち図2−1のような双魚眼状の画像形式を持つ動画をライブ配信し、かつ、図1−8のような閲覧用クライアント上で、その双魚眼状の画像形式を持つ動画を、実時間で、通常の遠近法、ないしは正射影法(オーソゴナル・ビュー)、あるいは立体射影法(ステレオグラフィック・ビュー)などに変換して、閲覧する。
(もっと読む)
画像処理装置、画像処理システム、および、画像処理方法
【課題】車両と障害物との位置関係をユーザが直感的に把握できる画像処理システムを提供する。
【解決手段】複数のカメラで撮影された画像の各画素を仮想的な立体曲面に投影し、立体曲面のうちケラレによる光量低下が生じている周辺領域を除いた略半球状の領域を用いて、任意の仮想視点に応じた車両を見下ろした状態の複数の合成画像を生成し、生成された合成画像を表示部で連続表示する。これにより、車両の周囲を周回するように表示がなされ、ユーザは車両と障害物との位置関係を直感的に把握できる。
(もっと読む)
車両用運転支援装置
【課題】地理的な対象物の探索に関して、処理速度と検出精度とを高めることができる車両用運転支援装置を提供する。
【解決手段】前方監視カメラ3、GPS4、ジャイロセンサ5、制御ユニットUを利用して、ナビゲーション装置6が保有する三次元地図データとしてのボクセルBを抽出すると共に、そのボクセルBのうちから、区画線23等を含むものを抽出し、それらを前方監視カメラ3が撮影した撮影画像に組み込む。そして、その撮影画像21全域ではなく、その撮影画像21のうち、区画線23等を含むボクセルBについてのみ、区画線23等の検出処理を行う。これにより、探索領域(検出範囲)を少なくする。
(もっと読む)
画像検査方法および画像検査装置
【課題】マニュアルでの補正や多大な処理時間を必要とせず、ビデオ撮影装置で撮影している範囲内の任意の位置情報とビデオ撮影装置で撮影しているフレーム毎の範囲を撮影画像フレームと同期させて記録する。
【解決手段】走行する車両からビデオ撮影装置等でコンクリート構造物の表面劣化を検査する方法において、ビデオ撮影装置で撮影している範囲内の任意の位置情報をビデオ撮影装置の移動装置に取り付けた位置検出装置から求めるとともに、ビデオ撮影装置で撮影しているフレーム毎の範囲を、ビデオ撮影装置から撮影対象物までの距離情報から求め、撮影画像フレームと同期させて記録する。
(もっと読む)
インタラクティブミラーの表示制御プログラム
【課題】瞬時に画面を切り換えて鏡機能の他に接客効果、前の服を着たときの画像と現在の画像或いは複数種の服をきたときの画像とを比較させることができる服飾用のインタラクティブミラーを得る。
【解決手段】ディスプレイ2にタッチパネル1を貼り付けて縦型にした本体部の左又は右側にビデオカメラ3を配置し、ビデオ画像を初めに表示してビデオカメラ3からの撮影画像に対して所定の補正を行った画像をビデオ画像に代えてディスプレイ2に表示すると共に、該画像の種類に応じたボタンウインドウを重ね表示して、該ボタンウインドウのボタンの選択に応じた画像を表示する。コンピュータ本体部10にビデオ処理部15、ミラー処理部20、撮影処理部23、比較処理部27を備え、それぞれが自身の処理部に対して他の処理部が起動しているときは起動を停止し、前記ボタンウインドウの中で自身を指定するボタンが選択されたときは起動を再開する機能を備える。
(もっと読む)
特定の対象物品の識別のためのX線断層撮影検査システム
本明細書が開示するX線走査システムは、対象物の断層撮影X線画像を規定する走査データを生成する非回転式X線走査装置と、プログラム命令を実行するプロセッサとを備え、実行するプロセッサは、走査データを解析して、断層撮影X線画像の少なくとも1つのパラメータを抽出し、プロセッサは、対象物が液体、鋭利な対象物、薬物、紙幣、核物質、シガレット、または小火器を含むかどうかを判定するように構成される。 (もっと読む)
1 - 20 / 107
[ Back to top ]