
Fターム[5C054FD02]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 立体像;パノラマ画像 (203)
Fターム[5C054FD02]に分類される特許
81 - 100 / 203
画像処理装置
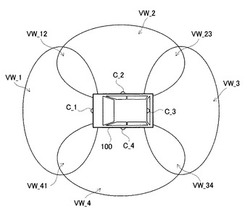
【構成】カメラC_1〜C_4のうちカメラC_3およびC_4に注目したとき、カメラC_3およびC_4は、共通視野VW_34を部分的に有し、かつ路面に対して斜めに交差する方向の被写界を捉える。CPUは、カメラC_3およびC_4からそれぞれ出力された被写界像P_3およびP_4を取り込み、路面の上方から被写界を捉えた状態を表す鳥瞰画像を取り込まれた被写界像P_3およびP_4に基づいて作成する。CPUはまた、共通視野VW_34に障害物が存在するとき、鳥瞰画像上の障害物画像の姿勢を、カメラC_3およびC_4と障害物との位置関係に基づいて調整する。
【効果】共通視野VW_34における障害物の再現性が向上する。
(もっと読む)
車載周辺画像表示装置

【課題】カメラで撮影した画像を俯瞰画像に変換するための射影変換規則を簡易に修正できる「車載周辺画像表示装置」を提供する。
【解決手段】自動車の四方を撮影する4台のカメラを撮影領域が一部重複するように配置し、各カメラで撮影した画像を、それぞれ射影変換して合成し、俯瞰画像を生成する。俯瞰画像で不具合が視認されたカメラを調整対象カメラとし、調整対象カメラの撮影領域と、他のカメラと撮影領域の重複範囲内の地面に正方形の校正パターンが描かれているターゲットボードを配置し、調整対象カメラで撮影した校正パターンを射影変換したパターンと、前記他のカメラで撮影した校正パターンを射影変換したパターンが一致するように、調整対象カメラで撮影した画像に対して用いる射影変換のパラメータを調整する。
(もっと読む)
管内壁面画像展開システム
【課題】作業者が管状物の展開画像を立体的に認識することが可能な管内壁面画像展開システムを提供することを目的とする。
【解決手段】本発明に係る管内壁面画像展開システム50によれば、画像データSvpに対し視点の異なる2つの第1サンプリング位置Pa、第2サンプリング位置Pbで第1画像データSPa、第2画像データSPbをサンプリングし2つの第1展開画像Sfa、第2展開画像Sfbを作成する。そして、同一位置の第1展開画像Sfa、第2展開画像Sfbを左右に並べて表示することで、作業者は第1展開画像Sfa、第2展開画像Sfbを一つの立体的な展開画像として認識することができる。
(もっと読む)
周囲監視装置を備えた作業機械
【課題】作業機械の上方に視点を持つ俯瞰画像と周囲を撮影するカメラからのカメラ画像を最適位置で結合して違和感のない結合画像を生成する。
【解決手段】作業機械に取り付けられ前記作業機械の周囲を撮影する複数のカメラ13からのカメラ画像をもとに前記作業機械の上方に視点を持つ俯瞰画像を作成する俯瞰画像作成部300と、作業機械の動作を判定して、前記俯瞰画像にカメラ画像を結合して結合画像を作成する際の結合位置を算出する結合位置算出部400と、前記俯瞰画像に前記カメラ画像を前記結合位置算出部が算出した位置で結合して結合画像を作成する結合画像作成450部と、結合画像作成部で作成した結合画像を合成する結合画像合成部500と、前記結合画像合成部で合成した合成画像から障害物を検出する合成画像障害物検知部600と、前記合成画像に障害物検知情報を重畳して表示する表示画像生成部900を備えた。
(もっと読む)
ナビゲーションシステム、道路地図表示方法
【課題】目視されている光景とカメラによる撮影範囲の関連を運転者が把握容易なナビゲーションシステム及び道路地図表示方法を提供すること。
【解決手段】道路地図13に自車両の現在位置を表示するナビゲーションシステム100であって、現在位置と自車両周囲を撮影するカメラ25の画角に基づき撮影範囲を特定する撮影範囲特定手段31と、撮影範囲に対応する道路地図上の領域を決定する画像領域決定手段32と、領域を示すオブジェクト12を道路地図13に生成するオブジェクト生成手段35と、オブジェクト12を含む道路地図13を表示する表示手段37、29と、を有することを特徴とする。
(もっと読む)
画像処理装置
【構成】カメラC_1〜C_4は、自動車に設けられて斜め下方向の被写界を捉える。メモリ制御回路12は、カメラC_1〜C_4から繰り返し出力される被写界像P_1〜P_4を、SDRAM14を利用して鳥瞰画像BEV_1〜BEV4に変換する。CPU20は、カメラC_1〜C_4から出力される被写界像P_1〜P_4の位相関係を繰り返し変更し、メモリ制御回路12の負荷が基準値を上回るか否かを位相変更処理と並列して繰り返し判別する。判別結果が否定的な結果から肯定的な結果に更新されると、メモリ制御回路12の画像変換特性がCPU20によって変更される。判別結果が否定的な結果から肯定的な結果に更新されることなく既定期間が経過すると、メモリ制御回路12の画像変換特性がCPU20によって確定される。
【効果】鳥瞰画像の再現性が自動車毎に適正化される。
(もっと読む)
映像システム
【課題】 複数の双眼撮影部を1つの双眼表示部で切り換えて表示させることのできる映像システムを提供する。
【解決手段】映像システム(10)は、両眼視差に相当する相違が生ずる一対の画像を同一の同期信号で撮影する第1双眼撮像部(110)と、第1双眼撮像部と別に配置され両眼視差に相当する相違が生ずる一対の画像を同一の同期信号で撮影する第2双眼撮像部(210)と、第1双眼撮像部に設けられ一対の画像をネットワークに配信する第1配信手段(116)と、第2双眼撮像部に設けられ一対の画像をネットワークに配信する第2配信手段(126)と、第1配信手段又は第2配信手段の少なくとも一方の配信を受信できる受信部(126又は226)を有し両眼視差に相当する相違が生ずる一対の表示画面に一対の画像を同一の同期信号で表示する第1表示部(120又は220)と、を備える。
(もっと読む)
監視システム及び共連れ侵入監視方法
【課題】認証対象人数を確実に把握することで正規の認証者の利便性を向上させて、非認証者の共連れ侵入を効果的に防止できる監視システムを提供することにある。
【解決手段】共用エリアと管理エリアとをドア1により隔てた施設に適用する監視システムにおいて、カメラ10により共用エリアの指定範囲を撮影された映像を使用し、共用エリアから管理エリアに移動する認証対象者を特定し当該人数を計測する人数計測装置12を有する。コントローラ14は、認証装置13により認証された認証者人数と人数計測装置12により計測された人数との整合性を判定する。
(もっと読む)
画像処理装置及び方法、画像処理システム、並びに、画像処理プログラム
【課題】複数の動体の追尾表示処理において動体間の相対距離に応じて表示方法を変える事により、ユーザに各動体を認識させ易く且つ表示画面を有効利用することを目的とする。
【解決手段】切出画像生成部114は、横方向、縦方向の少なくとも一方の相対距離が所定の閾値よりも大きいと判断した場合には、各動体の切出画像を生成し、切出画像表示部116に供給する。切出画像表示部116は、切出画像生成部114より供給された複数の切出画像を別々の切出表示ウィンドウに表示させる。また、切出画像生成部114は、複数の横方向又は縦方向の相対距離が所定の閾値以下であると判断した場合には、これらの動体を切り出す1つの切出画像を生成し、切出画像表示部116に供給する。切出画像表示部116は、切出画像生成部114より供給された切出画像を1つの切出表示ウィンドウに表示させる。
(もっと読む)
車両周辺監視装置
【課題】車両に搭載された撮像手段により撮像された画像から前走車両等の画像部分を精度良く判別して、監視対象から除外することができる車両周辺監視装置を提供する。
【解決手段】車両に搭載された赤外線カメラ2R,2Lにより撮像された画像に基づいて、車両の周辺を監視する車両周辺監視装置において、赤外線カメラ2R,2Lにより撮像された画像から、実空間上の対象物の画像部分を抽出する対象物抽出手段20と、対象物抽出手段20により抽出された画像部分に対応する実空間上の対象物と、自車両との相対速度を算出する相対速度算出手段21と、相対速度算出手段21により算出された相対速度の単位時間あたりの変化率が所定値以下である状態が、判定時間以上継続したときに、対象物抽出手段20により抽出された画像部分に対応する実空間上の対象物を、監視対象から除外する非監視対象除外手段25とを備える。
(もっと読む)
運転支援装置
【課題】全周鳥瞰図画像では、車両が旋回した場合、車両が回転するのではなく、背景のほうが回転してしまう。
【解決手段】画像生成部30は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。表示装置14は、画像生成部30において生成された鳥瞰図画像を表示する。画像生成部30は、車両の向きと駐車スペースの向きとの相対的関係が変わる場合、駐車スペースの向きが固定された鳥瞰図画像を生成する。
(もっと読む)
車両用情報表示装置
【課題】HMDを通じて種々の情報を視覚的に提供するだけでなく、目の疲れを防止する。
【解決手段】携帯端末Mを所持した乗員がHMD30を装着しているときには、携帯端末MからIDを取得し、このIDによって乗員を間接的に特定し、このIDに関連した乗員に対応した光量が目Eに入るように、携帯端末Mのメモリに予め用意した目標照度に基づいてHMD30のレンズ32(液晶パネル40)を通過する光量が調整される。この目標照度は、携帯端末Mのメモリ92に含まれる瞳の色、性別、年齢という属性を取り込んで、これらの情報に基づいて調整した後に、調整後の目標照度に基づいてHMD30の液晶パネル30の光透過度が制御される。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】画面全体が動くような大きな動きを含む映像を見る際に生じる視覚的負担を軽減可能な画像処理装置等を提供する。
【解決手段】本発明の画像処理装置は、入力映像信号に基づいて複数の動きベクトルを検出する特徴検出部と、複数の動きベクトルの相互の大きさ及び向きに関する判断基準に基づき、入力映像信号に対する信号処理を行うか否かを判断する判断部と、判断部において信号処理を行うと判断された場合に、入力映像信号に係る映像の品質を低下させるための信号処理を行う映像信号処理部と、を有する。
(もっと読む)
車両用周囲状況提示装置
【課題】提示された画像が車両周囲を正確に捕らえた正規画像ではないことを表示して、乗員における車両周囲状況の誤認を防止することを課題とする。
【解決手段】車両周囲の俯瞰画像を提示するために、車両のドアミラーならびにバックドアの可動体に設置されたカメラ3が車両周囲を撮影する際に、ドアミラーが格納状態、ドアミラーが装着された前席左右のいずれか一方または双方のドアが開いている状態、バックドアが開いている状態の撮影が不適格な少なくとも1つの状態が検出されると、撮影が不適格な状態が検出された可動体に設置されたカメラで撮影された画像に基づいて生成される部分の俯瞰画像に代えて、この俯瞰画像に重畳してドアミラーが格納されている状態やドアが開いて状態を表示し、かつ×マークを表示することを特徴とする。
(もっと読む)
全周映像のための表示技術
【課題】これまでよりも優れた全周映像の表示を実現する。
【解決手段】全周映像のうち特定の範囲の表示を行う映像表示技術と、特定の人物の箇所のみの映像を抜き出して表示する映像表示技術を組み合わせることにより、誰がどこへ向かって話しているか、3次元的な位置関係はどういうものであるかなどを容易に把握しうる全周映像表示を可能とする。人物が3次元的な位置関係を保って表示されることから、会話の流れを容易に把握することができる。実施形態によっては、抜き出した映像を表示するにおいて、位置調整や左右反転などの処理を入れることもでき、誰が誰に話しているかをさらに容易に把握することが可能となる。
(もっと読む)
駐車補助のための画像表示方法
【課題】自動車の運転補助用画像表示方法を提供する。
【解決手段】−特定の要因(EV)に従って変化する、自動車の3Dモデルの3D視点(POV)を定める過程と、
−前記3D視点(POV)に従って捉えられる3D映像(SC)を形成する過程であって、
前記3D映像(SC)は、
−前記3D視点(POV)に従って形成される自動車の3Dモデル、および
−自動車(V)に搭載したビデオカメラ(CAM)によって撮影され、かつインストゥルメンタルパネルのスクリーンに、前記3D視点(POV)に従って表示されることによって運転者から透視される立体角(A)の仮想視野(SCRV)を含み、
−前記ビデオカメラ(CAM)によって撮影され、かつ前記仮想視野(SCRV)内に投影された自動車の外部環境を含む3D映像を表示する過程とを含んでいる。
(もっと読む)
動き検出装置
【課題】検出範囲として画像の奥行き方向を設定可能な動き検出装置を提供する。
【解決手段】撮像装置20が連続して出力する画像から動きを検出する動き検出装置10であって、撮像装置20が出力する画像における撮像対象物の所定の基準位置からの距離を所定のブロック単位で測定して距離情報として出力する距離情報生成部110と、動きを検出する対象領域となる基準位置からの距離範囲の指定を受け付け、距離範囲を設定する距離範囲設定部120と、前後の画像に対応した距離情報同士をブロック単位で比較することで、設定された距離範囲内で動きがあったかどうかを判定し、動きがあったと判定した場合に動き検出信号を出力する変化判定部140と、を備える。
(もっと読む)
内視鏡システム、内視鏡手術訓練システム
【課題】 内視鏡手術において術者に常に鮮明な立体映像を提示することができる内視鏡システムを提供する。
【解決手段】 患者の体腔内に少なくとも一部が挿入された内視鏡装置によって撮影された映像を表す映像光を投影するプロジェクタ12,13と、術者及び助手に対して凹面を向けた投影面11aの形状を有し映像光が投影面11aに投影されるドーム型スクリーン11とを備える。ドーム型スクリーン11は、開口面の中心を通り開口面に対して垂直な軸を第1軸とし、第1軸と投影面11aの交差する点を投影面中心とし、投影面中心から投影面11aの縁部を結んだ軸を第2軸とし、投影面11aの縁部の接線を第3軸とした場合、第1軸と第3軸とのなす角度が第1視点位置より映像全体を観察することが可能な角度となっており、且つ第1軸と第2軸とのなす角度が第2視点位置より投影面中心を観察することが可能な角度となっている。
(もっと読む)
遠隔損傷検出システム、遠隔損傷検出方法およびコンピュータプログラム
【目的】 遠方に存在する設備や建造物などに異常が発生していないかどうかを、現場に赴かずに検知することが可能な技術を提供する。
【構成】 被写体を定点から連続撮像する長焦点系の撮像手順と、 その撮像手順にて取得した連続する複数時刻の画像データについて重ね合わせ処理を施す画像重ね合わせ手順と、 その画像重ね合わせ手順による重ね合わせ画像から非正常箇所を抽出する非正常箇所抽出手順と、 その非正常箇所抽出手順にて抽出された非正常箇所を強調した画像データを作成する強調処理手順と、を備えた遠隔損傷検出方法に係る。 前記の画像重ね合わせ手順は、重ね合わせ処理における画像データ間のずれを修正するサブピクセル処理を含み、 前記の強調処理手段は、非正常箇所を視認可能とするハイパスフィルタ処理を含む。
(もっと読む)
車両用環境認識装置および先行車追従制御システム
【課題】ステレオ撮像手段から出力された一対の画像に対するステレオマッチング処理でミスマッチングが発生していることを的確に判定することが可能な車両用環境認識装置を提供する。
【解決手段】車両用環境認識装置1は、基準画像TOと比較画像TCを出力するステレオ撮像手段2と、基準画像TO等に対するステレオマッチング処理で算出した各第1視差dp1により第1距離画像TZ1を形成する第1ステレオマッチング手段7aと、前処理後の基準画像TEO等に対するステレオマッチング処理で算出した各第2視差dp2により第2距離画像TZ2を形成する第2ステレオマッチング手段7bと、第1距離画像TZ1と第2距離画像TZ2の対応する画素ブロックPBOの第1視差dp1と第2視差dp2の差の絶対値が所定の閾値Δdpth以上である画素ブロックPBOでミスマッチングが発生していると判定するミスマッチング判定手段13とを備える。
(もっと読む)
81 - 100 / 203
[ Back to top ]