
Fターム[5C054FD02]の内容
閉回路テレビジョンシステム (47,623) | 画像再構成処理 (1,375) | 三次元処理 (1,005) | 立体像;パノラマ画像 (203)
Fターム[5C054FD02]に分類される特許
41 - 60 / 203
カメラユニット取付方法及びカメラユニット
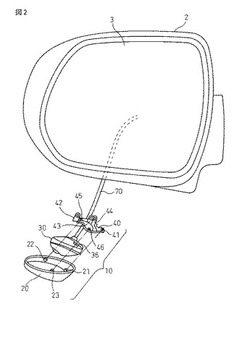
【課題】ドライバーの安全運転を支援するのに最適な車両周囲の画像を撮影するためのカメラユニットの取り付け方法及びカメラユニットを提供することを目的とする。
【解決手段】撮像レンズ(31)は、カメラユニット(30)の真下の地面に対する垂直方向から撮像レンズの光軸方向のまでの角度(ψ)が、以下の式(1)を満足するようサイドミラーハウジング(2)に取り付けられる、
ω/2−θ1≦ ψ ≦90°−(ω/2−θ2) (1)
ここで、ωはカメラユニットの視野角をいい、θ1はカメラユニットの真下の地面に対する垂直方向から車両のタイヤの上部までの角度をいい、θ2は撮像レンズの取り付け位置の地面に対する水平方向からカメラユニットで撮像されるべき対象物の頂部までの角度をいうことを特徴とする。
(もっと読む)
運転支援表示装置

【課題】車両後方、又は前方の、前、左右、及び下方向の広い範囲の撮像から表示において、目的に応じた視認性の高い被写体の形状表示、被写体と車両の方向性や位置関係の視認性向上、及び画面上で移動する被写体に対する目線の移動を容易にする運転支援表示装置を提供する。
【解決手段】車両前後方向、車両前後方向から垂直に下の方向、水平に左の方向、水平に右の方向、にそれぞれ垂直な平面上の正方形の被写体が、各方向に対応した領域内で同じ大きさの正方形又は長方形に表示される前方向補正画像表示領域41−1と他の表示領域が隣接配置され、隣接付近の表示画像は一致し、水平な地面に垂直或いは車両左右方向の直線と一致する直線である。更に、左方向補正画像表示領域41−3L、又は右方向補正画像表示領域41−3Rの下辺と、下方向補正画像表示領域41−2の左辺、又は右辺は同じ位置の車両前後方向直線と一致する直線である。
(もっと読む)
画像生成装置及び操作支援システム
【課題】複数のカメラの設置位置や光軸方向に適した空間モデルを用いて出力画像を生成する画像生成装置を提供すること。
【解決手段】画像生成装置100は、ショベル60を取り囲むように配置される空間モデルMDにおける座標と、三つのカメラのそれぞれに対応する三つの入力画像平面における座標とを対応付ける座標対応付け手段10と、空間モデルMDにおける座標を介して、それら三つの入力画像平面における座標の値と出力画像平面における座標の値とを対応付けて出力画像を生成する出力画像生成手段11とを備え、空間モデルMDは、空間モデル部分MD1、MD2の組み合わせであり、空間モデル部分MD1、MD2のそれぞれは、基準軸を有し、隣り合う一対のカメラに対応し、それら一対のカメラのそれぞれの光軸がその基準軸と交差するように配置される。
(もっと読む)
画像情報提供装置および画像情報提供方法
【課題】提供される画像情報から、ユーザが車両に生じている異常を容易に認識するができるように画像情報を作成する。
【解決手段】カメラ11a〜11dから出力される画像がマッピングされた三次元空間のモデルSMを視点変換することにより、車両周囲画像を作成する。視点変換を行う際には、車両Caに生じている異常の検出結果に基づいて、車両周囲画像に車両Caに生じている異常が含まれるように仮想視点の計算を行う。
(もっと読む)
車載カメラ校正システム及びコンピュータプログラム
【課題】特定の路面標示や、予め記憶した路面標示の特徴量を必要とすることなくカメラの校正を行える「車載カメラ校正システム及びコンピュータプログラム」を提供する。
【解決手段】カメラ1で撮影した二つ画像フレームから特徴点を抽出し、同じ地点を表す特徴点のペアにペアリングする。画像フレーム上の座標と、当該画像フレーム上の座標に写り込む地点の前記自動車に固定された世界座標系上の座標との、カメラ姿勢を変数として用いた関係式に従って、前記ペアにペアリングされた二つの特徴点の前記画像フレーム上の座標を用いて示される、当該ペアにペアリングされた二つの特徴点が表す地点の世界座標系上の移動量と、自動車の車速から算出した当該自動車の移動量Dyに対する誤差の、各ペアについての総和が最小となるように、カメラの姿勢を算出する。
(もっと読む)
カメラ姿勢パラメータ推定装置
【課題】広角カメラの姿勢パラメータを容易にかつ正確に推定する技術を実現する。
【解決手段】カメラ姿勢パラメータ推定装置は、半球以上の視野を有する広角カメラにより得られる広角画像から、実空間における、相互に平行な少なくとも2つの第1直線及び第2直線と、第1直線及び第2直線と垂直な関係を有する1つの第3直線とから構成される特定パターンを形成し得る各線分をそれぞれ取得するパターン取得手段と、このパターン取得手段により取得された特定パターンを形成し得る各線分を用いて上記広角画像に対する2組の消失点ペアを決定する決定手段と、この決定手段で決定された2組の消失点ペアを用いて地面に対する広角カメラの姿勢パラメータを推定する推定手段と、を備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び立体内視鏡装置
【課題】画像を参照する参照者の疲労感や緊張感を緩和させる。
【解決手段】内視鏡による広角側撮影画像(2D画像)、立体視用画像(3D画像)およびナビゲーション用の画像(全体画像)を取得し、2D画像の一部に3D画像を表示させ(ステップ100〜108)、3D画像への術者の視線滞留時間が所定時間T0以上で、3D画像表示領域を徐々に広げ(ステップ110〜114)、術者の2D画像と3D画像間の視線移動が所定頻度h1以上で3D画像表示領域を徐々に狭くする(ステップ116〜134)。
(もっと読む)
車両用画像処理装置
【課題】撮影画像が射影変換された上方視画像のオプティカルフローに基づいて上方視画像に含まれる道路と道路上の物体とを適切に区別して識別できる技術を提供する。
【解決手段】自車両1に搭載された単眼カメラ3が撮影した自車両1周囲の撮影画像が変換手段6bにより射影変換された上方視画像のオプティカルフローが算出手段6cにより算出される。そして、上方視画像に含まれる道路部分のオプティカルフローのフローベクトルの大きさはほぼ同じ大きさとなり、上方視画像に含まれる道路上の物体(他車両)のフローベクトルの大きさは物体の高さに応じて大きくなるため、撮影画像が射影変換された上方視画像のオプティカルフローのフローベクトルの大きさの時系列的な変化に基づいて、上方視画像に含まれる道路と道路上の物体とを識別手段6dにより適切に区別して識別できる。
(もっと読む)
制御装置、カメラシステム及びプログラム
【課題】表示されている画像に対応するカメラが制御可能であるかを確実に認識できるとともに、表示されている画像が全体画像のどの範囲に位置するかを確実に認識すること。
【解決手段】カメラ端末装置200で撮像されたパノラマ画像を表示するパノラマ画像表示領域と、パノラマ画像で指定された位置に対応する領域を拡大して拡大画像を表示する拡大画像表示領域と、を表示するように制御する表示処理部305と、パノラマ画像上で指定された位置に対応する領域をカメラ端末装置200で撮像するように制御する制御部310と、を有し、表示処理部305は、制御部310による制御が可能か否かに応じて前記全体画像の表示状態を変更する、センターサーバー300が提供される。
(もっと読む)
画像処理装置および画像処理システム
【課題】低コストで高品位に複数の映像信号を合成する画像処理装置および画像処理システムを提供する。
【解決手段】画像処理システムは、4つのカメラ1a〜1dと、画像処理装置30と、液晶ディスプレイ10とを備えている。画像処理装置30は、選択部2と、ADコンバータ3と、NTSCデコーダ4と、RAM5と、視点射影変換部6と、合成部7と、制御部8と、LCDコントローラ9とを有する。非同期カメラ1a〜1dと、1つずつのADC3、NTSCデコーダ4およびRAM5により、低コストで画像処理システムを構成できる。また、制御部2を設け、同期パルスが検出された順に映像信号を自動的に選択するため、効率よく短時間で映像信号11a〜11dを選択でき、高品位な俯瞰画像を生成できる。
(もっと読む)
映像合成装置、及び映像合成プログラム
【課題】複数のカメラ映像から1つの俯瞰映像を合成する装置において、使用するカメラの数が増えても、映像の解像度が低下しないように、自動的に最適な俯瞰映像が表示されるようにする。
【解決手段】俯瞰映像を合成して表示する映像合成装置であって、入力情報を受付ける入力情報受付部と、受付けた入力情報に基づいて俯瞰映像の表示範囲を決定する表示範囲決定部と、決定した俯瞰映像の表示範囲に基づき、当該表示範囲の俯瞰映像の合成に用いる映像を撮影する所定数のカメラを選択して決定するカメラ選択決定部と、決定した所定数のカメラの映像における重複部分について、いずれのカメラの映像を割り当てるかを決定するカメラ映像割り当て決定部と、割り当てに基づいて、決定した所定数のカメラによって撮影された映像を用いて、俯瞰映像を合成して表示する映像合成部とを備える。
(もっと読む)
画像合成装置、及び、画像合成方法
【課題】車両搭載の複数のカメラ画像を合成した合成画像を看やすくすることができる技術を提供する。
【解決手段】車両に搭載される複数の画像を合成する画像合成装置は、夫々異なる方角へ向けて車両外側に搭載された複数の撮像手段から複数の画像を入力し、入力した複数の画像の輝度に基づいて複数の画像のうちの一画像を代表の画像として決定し、代表の画像を基準にして他の画像の輝度を調整するとともに、代表の画像と輝度が調整された他の画像とを車両の周辺の様子を示す一の車両周辺画像に合成するので、輝度のムラが少なく、一枚の車両周辺画像として看者に違和感を持たせることを防ぐことができる。
(もっと読む)
後方視野用の複数機能カメラシステム
【課題】異なる車両においても、良好なパノラマ後方監視を実現するカメラシステムを提供する。
【解決手段】車両の後方側面に位置決めされ、第1の視野に対応する画像データを含む第1のデータセットを作成する第1のカメラと、第2の視野に対応する画像データを含む第2のデータセットを作成する第2のカメラと、電子制御ユニットを備え、第1のデータセット及び第2のデータセットを処理して車両の後方側面に隣接する空間内の物体の存在を判断するとともに、車両の後方側面に隣接する空間に対応するパノラマ画像を作成。また、ヒューマン・マシン・インターフェースが、車両の操作者に隣接して位置決めされる視認用画面を備え、パノラマ画像を受信し、パノラマ画像を視認用画面上に表示する。
(もっと読む)
車両周辺画像表示装置および車両周辺画像表示方法
【課題】車両周辺の立体物を識別可能にかつ適切に表示することができる俯瞰画像を生成すると共に運転状況を自動的に把握し、運転状況に応じた最適な運転支援情報を俯瞰画像に加えて表示し統合的に運転支援を行うことができる車両周辺画像表示装置を提供する。
【解決手段】本発明に係る車両周辺画像表示装置は、車両の周辺を撮像する複数の魚眼カメラから得られる複数の画像を夫々通常の画像に正規化処理し正規化画像を生成する正規化処理部と、正規化画像から、車両上方の仮想視点から車両の周辺を俯瞰する俯瞰画像を生成する俯瞰画像生成部と、車両の運転を支援するための運転支援画像を生成する支援画像生成部と、運転支援画像と俯瞰画像とを合成する画像合成部と、俯瞰画像とともに運転支援画像を表示する表示部とを備えたことを特徴とする。
(もっと読む)
車載撮像装置
【課題】撮像画像の不可視領域により車載撮像装置の視覚補助機能が妨げられることを防止できる車載撮像装置を提供する。
【解決手段】車両に搭載される撮像手段1と、車両の位置を検出する位置検出手段5と、撮像手段1で得られた画像と位置検出手段5で検出された位置情報とを関連づけて記憶する記憶手段17と、撮像手段1で撮像された画像に不可視領域が存在するか否かを判断する不可視領域判断手段13と、不可視領域判断手段13により画像に不可視領域が存在すると判断されたとき、位置検出手段5で検出された車両の位置と一致する過去画像を記憶手段17より抽出し、過去画像を撮像手段で撮像された現在画像に合成する画像合成手段14とを備える。
(もっと読む)
監視カメラ画像を用いた連動表示計測システム
【課題】段階的な手段をとらなくとも一目で監視カメラ画像、三次元画像、平面図画像上での指定個所をそれぞれの画像上で正確に直に提供できる単眼視の監視カメラ映像を用いた連動表示計測システムを得る。
【解決手段】カメラ選択部31と、モード判定部32と、画角設定部33と、表示処理部34と、カメラ画像指定個所連像表示部11と、GIS画像指定個所連動表示部12と、平面図指定個所連動表示部13等を備えて、対象範囲が数キロに亘る広範囲で撮影されたカメラ画像を三次元地形モデルに対応付けて、その監視カメラが撮影した三次元GIS画像並びに平面図画像を連動表示すると共に、いずれかの画像(カメラ画像、三次元GIS画像若しくは平面図画像)上の指定位置(カーソル)を各々の画像上に連動表示し、かつその指定位置の三次元座標を知らせる。
(もっと読む)
画像処理装置、画像処理システム、および、画像処理方法
【課題】車両と障害物との位置関係をユーザが直感的に把握できる画像処理システムを提供する。
【解決手段】複数のカメラで撮影された画像の各画素を仮想的な立体曲面に投影し、立体曲面のうちケラレによる光量低下が生じている周辺領域を除いた略半球状の領域を用いて、任意の仮想視点に応じた車両を見下ろした状態の複数の合成画像を生成し、生成された合成画像を表示部で連続表示する。これにより、車両の周囲を周回するように表示がなされ、ユーザは車両と障害物との位置関係を直感的に把握できる。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
画像処理装置
【課題】車両の走行ルートに沿った路面のデータベース画像を生成することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像が背景画像取得手段6aにより取得されたときの自車両1の位置情報が位置情報取得手段6bにより取得され、位置情報取得手段6aの自車両1の位置情報に基づいて、生成手段6dにより、各フレームの撮影画像が射影変換された障害物を含まない上方視の画像がつなぎ合わされて、路面領域が連続する路面のデータベース画像が生成される。したがって、走行中の自車両1の単眼カメラ3の撮影画像に基づいて路面のデータベース画像を生成することができるため、例えば通勤の際に単眼カメラ3により撮影された撮影画像から自車両1の走行ルートに沿った路面のデータベース画像を生成することができる。
(もっと読む)
単一のイメージングチップ及び共役させられたマルチバンドパスフィルターを備えた立体のイメージングの小規模の内視鏡
体の関心のある内側の領域の立体視のイメージを提供するための体の空洞への挿入のための二重の対物系の内視鏡は、関心のある領域(ROI)の光学的なイメージを得ると共に、有線の及び/又は無線の送信のための映像の信号及び描画するデバイスにおける3Dのイメージの表示を形成するために光学的なイメージを処理するための遠位の末端におけるイメージングデバイスを含むものである。イメージングデバイスは、ROIの光学的なイメージを得るためのフォーカスの平面の検出器アレイ(FPA)及びFPAの後部における処理する回路を含む。処理する回路は、映像の信号へと光学的なイメージを変換する。イメージングデバイスは、右の及び左の共役させられたマルチバンドパスフィルターを通じて右の及び左のイメージを受けるための右の及び左の瞳を含む。照明器は、右の及び左の共役させられたマルチバンドパスフィルターに調和させられたものであるところの三個の右の及び三個の左のパスバンドを有するマルチバンドパスフィルターを通じてROIを照明する。フルカラーのイメージは、赤色の、緑色の、及び青色の光での三個の又は六個の順次の照明の後に収集されたものである。 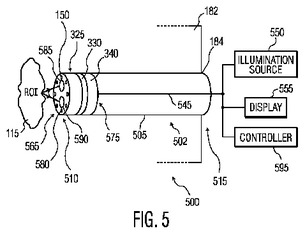 (もっと読む)
(もっと読む)
41 - 60 / 203
[ Back to top ]