
Fターム[5C054FE11]の内容
閉回路テレビジョンシステム (47,623) | 特殊表示 (4,983) | 複数映像の同時表示 (2,371)
Fターム[5C054FE11]の下位に属するFターム
Fターム[5C054FE11]に分類される特許
181 - 194 / 194
監視記録装置
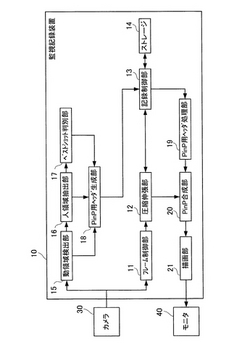
【課題】 従来のものよりも容易に監視対象を特定できる映像を記録することができる監視記録装置を提供すること。
【解決手段】 監視記録装置10は、映像信号を所定時間間隔で入力するフレーム制御部11と、映像信号のデータを圧縮伸張する圧縮伸張部12と、圧縮された映像データを記録するストレージ14と、監視領域に出入りする人物の映像を含む領域を検出する動領域検出部15と、検出された領域から人物の顔映像の領域を抽出する人領域抽出部16と、抽出された顔映像のうちベストショットを判別するベストショット判別部17と、ベストショットのデータに付加するヘッダ情報を生成するPinP用ヘッダ生成部18と、ヘッダ情報に基づいてベストショットのデータと圧縮伸張部12からの映像データとを合成するPinP合成部20と、合成された映像を描画処理する描画部21とを備える。
(もっと読む)
映像信号処理装置とその方法及び車載カメラシステム

【課題】表示までの遅延時間及び各カメラ映像の時間ずれを短縮して、車両周囲の状況を適切に運転者に表示することができる車載カメラシステムを提供する。
【解決手段】車載映像表示用カメラシステムでは、複数のカメラで撮影された映像の映像信号がインターレス信号として入力され、入力バッファにフィールド単位で順次記憶される。複数のカメラからのフィールド映像信号が揃ったら(時刻t3)、各カメラからの映像信号の中の最新のフィールド映像信号(Even1b及びOdd2a)を用いて、各映像データのアドレス変換を行って出力映像信号(DataOa)を生成する。したがって、カメラ間での映像のずれ(時刻t2と時刻t5の差)は、最大で1フィールド(NTSCの場合16.7ms)に抑えられる。また、出力までの最大遅延時間は、入力ずれ(t2−t5)、入力(t3−t2)及びアドレス変換(t4−t3)の各所要時間の合計(t4−t5)で、3フィールド期間(約最大50ms)となる。
(もっと読む)
広範囲のセキュリティ監視、センサ管理および状況認識の方法およびシステム
本セキュリティシステムは、コンピュータネットワークと、夫々が個々のネットワークアドレスにてコンピュータネットワークに接続されており、夫々が感知データを生成する複数のセンサとを備える。管理コンポーネントが、ネットワークと接続されており、ネットワーク上の関連のネットワークアドレスを介してアクセスすることによりセンサと通信し、センサから受け取られたセンサ情報を処理する。管理コンポーネントは、ユーザにセキュリティシステム内の全てのセンサを表示するインターフェース画面を備えるディスプレイと、ユーザが管理コンポーネントに対話式命令を入力する入力装置とを有する。管理コンポーネントは、センサとの間の通信を制御し、規則を内蔵するエンジンを有する。各規則は、ネットワーク上の各装置と関連付けられ、装置の少なくとも1つからの出力に応じて管理コンピュータに措置を講じさせる。 (もっと読む)
車両の監視画像の表示方法
【課題】同一画面に表示される監視画像が車のどの部分のものであるのかを、監視画像の内容を確認することなく、直ちに認識できる車両の監視画像の表示方法を提案すること。
【解決手段】車両2における複数の監視場所に取り付けた監視カメラ3(1)〜3(5)から取得した監視画像31〜35を同一の表示画面7aに表示する車両のモニターシステム1では、監視画像毎に異なる表示形態で表示画面7a上に表示する。例えば、フロントガラスを連想させる扇形表示枠21内に前方の監視画像31を表示し、前後左右の視野を連想させるように異なる向きに配置した平行四辺形表示枠22〜25内に、それぞれ前方右側、後方右側、前方左側、後方左側の各監視画像32〜35を表示する。
(もっと読む)
車両用表示装置
【課題】 車両の走行視界を広く確保でき、利用者に対する利便性を向上させることが可能な車両用表示装置を提供する。
【解決手段】 車両用表示装置Aは、車両4の前方を少なくとも撮像する撮像手段11と、車両4の利用者6の実視界Pを遮るインパネ(遮蔽部材)5に設けられ、撮像手段11によって撮像された画像を表示する第1,第2のインパネモニタ(表示手段)31,32と、撮像手段11によって得られた画像データを画像処理し、利用者6がインパネ5によって遮られた実視界Pに関する表示画像(情報)P1,P2を第1,第2のインパネモニタ31,32に表示させる制御手段2と、を備えている。
(もっと読む)
移動体用通信装置
【課題】車両と車両との間で位置情報の授受を行え、走行中接近する他車を自動的に認識する。
【解決手段】自動車1に6個(四隅と左右)のDSRC通信機2a〜2fを設け、周囲に矩形状の通信エリア18を形成する。表示装置4a〜4d、自己の位置を検出する位置検出器5及び周囲を撮影するCCDカメラ7a〜7dを備える。各車両毎に相互に序列可能な通信用IDコードを設定し、第1の桁の値に相当する通信フレームの該当するパイロットスロットに送信して衝突がなければ対応する通信スロットにデータを送信する。衝突があるときには、第2の桁の値に対応するリカバリスロットに送信して通信スロットの割り当てを決定する。干渉を防止した確実な通信により複数の車両間でも位置情報を授受して表示装置表示させたり、至近距離を判断して警告などを発することができる。
(もっと読む)
車両の周辺監視システム
【課題】自車両周辺のできるだけ広い周環境を違和感なく一見で把握することのできる車両の周辺監視システムを提供する。
【解決手段】 車両に複数設置されたカメラ1によって撮影される撮影画像Pを車室内の表示装置3に表示する車両の周辺監視システムにおいて、これら複数のカメラ1からの撮影画像Pを水平方向に合成するための境界を指数関数近似により定める境界決定手段21と、この境界を直線による垂直境界とするために夫々の撮影画像Pを水平方向に正規化する水平正規化手段22と、垂直境界における撮影画像同士の垂直方向のずれを整合する垂直整合手段23と、一つに整合された画像の画素数を表示装置3の表示に適した画素数へ調整する画素数調整手段24とを有する画像処理部20を備え、この画像処理部20で生成した合成画像Wを表示装置3に表示する。
(もっと読む)
移動体追跡支援システム
【課題】 安価な移動体追跡支援システムを提供する。
【解決手段】 本発明の移動体追跡支援システムは、複数のカメラを用いて移動体の追跡を行うユーザーを支援する移動体追跡支援システムにおいて、個々の撮影領域をそれぞれ撮影する複数のカメラと、複数のカメラのうち二つまたはそれ以上のカメラの撮影映像を表示する表示手段34と、ユーザーにより移動体を撮影する第1のカメラを選択できるようにしたカメラ選択手段32と、各カメラの撮影領域同士の接続関係を記憶する接続関係記憶手段38と、カメラ選択手段32を介して第1のカメラが選択されると、接続関係記憶手段38を参照して、第1のカメラの撮影領域と接続関係にある撮影領域を撮影する一つまたはそれ以上の第2のカメラの撮影映像を、第1のカメラの撮影映像とともに表示手段34に表示させる表示撮影映像決定手段50とを備える。
(もっと読む)
ダクト清掃ロボットのカメラ撮像モニターシステムと、それを用いたダクト清掃方法
【課題】 大型空調ダクトの内面を清掃する自走型のダクト清掃ロボットのカメラ撮像モニターシステムと、それを用いたダクト清掃方法を提供する。
【解決手段】主要構成部は、カメラを複数搭載したダクト清掃ロボット本体と、そのカメラ映像を表示するカメラ撮像モニターシステムから成る。清掃形態は底板清掃(S301)と横壁清掃(S302)と天板清掃(S303)を選択するステップ(S304)を選択して、ブラシ回転・塵埃吸引・自走するステップ(S311)とロボットの幅寄せを検出するステップ(S314)の処理から成り、モニターシステムは、搭載するカメラの映像をモニターに送信するステップ(S330)と、カメラ画像選択ステップ(S331)と、幅寄せ検出ステップ(S314)をモニターで表示するステップ(S332)と、選択画像の同時表示ステップ(S333)から成る。その清掃形態の選択するステップ(S304)とモニターシステムのステップを連携させることにより、作業効率の良いダクト清掃が可能になる。
(もっと読む)
架台駆動映像撮影装置、およびカメラ監視システム
【課題】 1台のカメラで立体画像を監視できる映像撮影装置、および監視カメラシステムを提供する。
【解決手段】 基準位置で撮影した映像情報を映像処理した映像処理部3が異常を検出した場合、その基準位置の映像情報を静止画にして内部メモリに記憶するとともに警報を出力する。そして、警報を検知した制御部4が駆動架台2の姿勢を変えて駆動架台上に取り付けられたカメラ1の位置を移動して参照位置で撮影した映像情報から新たに静止画を生成し、基準位置で撮影して記録した静止画を内部メモリから読み出して照合して立体視するための制御を行い、1台のカメラで立体画像を監視することを可能とする。
(もっと読む)
リアルタイム画像又は静止画像の立体視システム
本発明は、画像が生成された瞬間に画像捕捉手段から獲得されたリアルタイム画像を簡単かつ非常に効果的な3次元ビューイング効果で表示し、それによって、観察者が大きさ、距離及び奥行きを適切に認識して精細、精密な動きを実行することを可能にさせる、リアルタイム画像又は静止画像の3次元立体視システムに関する。 (もっと読む)
デジタル映像監視
映像監視システムを形成する1つ以上の映像監視カメラと共に用いられるための制御システムである。制御システムは映像データベースモジュールを有し、映像データベースモジュールにおいて、データベース入力は各カメラに対する警報条件を定義する少なくとも1つのセンサ条件を含む。また、カメラに関連する1つ以上のセンサから1つ以上のセンサ信号を受け取り、カメラに対する警報状態を定義する少なくとも1つのセンサ条件を引き出す、警報条件モジュールがある。1つ以上のセンサ信号が1つ以上のセンサ条件を満たしているということを警報条件モジュールが決定すると、警報条件モジュールは警報信号を出力する。制御システムはモジュール式であり、ネットワーク環境内に分散し得る。帯域幅の制限を避けるために、制御システムはネットワーク帯域幅をモニタし、デジタル画像を表すデジタルデータのスループットを調節する。  (もっと読む)
(もっと読む)
デジタルスチルカメラ
【課題】 画像合成用に連続撮影された複数枚の撮影画像の内容を撮影処理後に直ちに確認できるようにする。
【解決手段】 ボケ味を調整するモードで操作部107から撮影が指示されると、全体制御部108は合焦位置を変化させてCCD102の露光を連続2回行い、ピント状態の異なる2枚の撮影画像を取り込む。撮影画像は信号処理部103で所定の処理が行なわれた後、画像メモリ103fにそれぞれ一時、記憶される。表示制御部108dにより画像メモリ103fに記憶された画像のうち、最もピント範囲の広い撮影画像は画像サイズが調整されてVRAM106dに転送され、EVF106dに表示される。撮影処理が終了し、画像データが画像メモリ103fに記憶された時点で1の撮影画像をEVF106dに表示することで、撮影終了後直ちに撮影内容を確認できるようにした。
(もっと読む)
多方向撮影装置
【課題】 1台のビデオカメラで複数方向の対象物を撮影でき、特に車両に搭載した場合には安全が確認し易い多方向撮影装置を得ること。
【解決手段】 本発明の実施形態の周辺撮影装置10は、ビデオカメラ20の前方に、かつミラー面31、41を外側にして、対物レンズ21側の側端縁32、42を衝合できるように、そして反対側の各側端縁33、43を開いてV字状に傾斜させて2枚のミラー30、40を配設し、前方方向を撮影する場合には、ミラー30、40の衝合している側端縁32、42を開き、周辺を撮影する場合には、前記側端縁32、42を対物レンズ21の中心線上に衝合させるように構成されている。
(もっと読む)
181 - 194 / 194
[ Back to top ]