
Fターム[5C054GB16]の内容
閉回路テレビジョンシステム (47,623) | 記録内容 (2,580) | 資料映像 (641) | コンピュータグラフィックス (36)
Fターム[5C054GB16]に分類される特許
1 - 20 / 36
3次元座標算出装置、3次元座標算出方法、及びプログラム
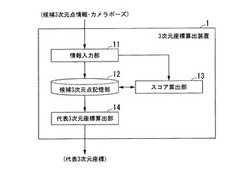
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
移動体検出装置、コンピュータプログラム及び移動体検出方法

【課題】高い精度で移動体を検出することができる移動体検出装置、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】特徴点抽出部103は、撮像画像の各画素の画素値に基づいて複数の特徴点を抽出する。候補点特定部104は、抽出された特徴点から車両の所定部位の候補点を1又は複数特定する。透視投影変換部105は、特定された候補点を、透視投影変換行列を用いて3次元座標空間に逆投影する。3次元モデル配置部106は、逆投影された候補点に整合させて3次元モデルを配置する。透視投影変換部105は、配置された3次元モデルを撮像画像に投影する。移動体検出部107は、撮像画像へ投影された3次元モデルにより画定される領域内に含まれる特徴点の数に基づいて、車両を検出する。
(もっと読む)
画像生成方法、画像生成装置、及び操作支援システム
【課題】旋回動作可能な被操作体に取り付けられる撮像手段が撮像する入力画像に基づいて生成される出力画像を見易く表示する画像生成装置を提供すること。
【解決手段】旋回動作可能な上部旋回体63に取り付けられたカメラ2が撮像する入力画像に基づいて出力画像を生成する画像生成装置100は、上部旋回体63の旋回状態を検出する旋回状態検出手段120と、上部旋回体63のCG画像70を出力画像上に重畳表示するCG画像表示制御手段121と、出力画像の更新状態を制御する出力画像更新制御手段122と、を備え、旋回状態検出手段120が旋回の開始を検出した場合に、CG画像表示制御手段121はCG画像70を出力画像上で旋回させる。
(もっと読む)
画像監視装置
【課題】現在表示している撮像画像上に監視部の監視範囲を再現することにより、監視者が監視場所の状況を迅速に把握しうることを目的とする。
【解決手段】撮像部と、監視部と、場所モデルと監視条件情報と撮像条件情報とを記憶した記憶部と、画像処理部と、表示部とを備えた画像監視装置であって、画像処理部は、監視条件情報と場所モデルとを用いて監視部の監視範囲を表す監視範囲モデルを生成し、監視範囲モデルと場所モデルと撮像条件情報とを用いて撮像部の視野に相当するレンダリング画像を生成し、撮像画像とレンダリング画像とを合成することにより監視部の監視範囲を表した合成画像を出力することを特徴とした。
(もっと読む)
制御装置および制御装置の更新方法
【課題】従来よりも短時間で画像を含むソフトウェアのリプログラムが行える車両の制御装置および制御装置の更新方法を提供する。
【解決手段】車両のECUのリプログラム(リプログ)処理において、プログラムのリプログでは、更新用のプログラムをCAN通信などを用いてデジタルデータとして送信する。静止画像5b(車室内の表示装置に表示される車両の画像210eやメッセージの文字画像212bなどを含む)のリプログでは、更新用の静止画像5bをNTSCエンコーダ回路45によって、テレビジョン放送で用いられる動画伝送形式の1つであるNTSC方式の信号に変換した後に、車両に装備されたカメラ画像の通信線を通じて送信する。
(もっと読む)
画像比較方法および画像比較プログラム
【目的】本発明は、画像比較方法および画像比較プログラムに関し、実画像上のパターンと元CADデータのパターンとの比較を容易に行うと共に、同じようなパターンの幅のものが複数存在してもその対応関係を実画像上で容易に判別可能にすることを目的とする。
【構成】試料を撮影した実画像からパターンを構成するライン、スペースのエッジを抽出するステップと、抽出したライン、スペースのエッジをもとにライン、スペースの幅、長さのいずれか一方あるいは両者に対応するエッジ間の距離を測定するステップと、測定したライン、スペースのエッジ間の幅および長さのいずれか一方あるいは両方に、実画像のライン、スペースと元のCADデータから生成したCAD画像のライン、スペースとのいずれか一方あるいは両者の比からなる補正係数を演算して補正CAD画像を生成するステップと、生成した補正CAD画像を実画像に重畳して表示するステップとを有する。
(もっと読む)
駐車支援システム
【課題】各種障害物を含む駐車支援用の画像提供を車両側の負担を極力少なくして行えるようにする。
【解決手段】駐車施設Tが、駐車施設T内の物体を検出するセンサ類19と、駐車スペース1を上方から撮像するカメラCと、カメラCで撮像された車両Vおよびその周囲の映像を含む駐車支援情報を生成する映像処理部12を有する。駐車支援用の画像が、映像処理部12から双方向通信によって車両Vに送信される。駐車支援用の画像は、センサ等19で検出された非定常物(例えば買物カートや人間)のデータを含むものとして生成される。
(もっと読む)
映像情報提示装置
【課題】通行人の注目度をより向上させる。
【解決手段】通行人の移動経路上に撮影装置100とディスプレイ装置200とを設け、通行人の画像をリアルタイム映像V1として撮影する。動体認識部350によりリアルタイム映像V1内の通行人部分を動体領域Aとして認識し、動体画像切出部340により通行人部分である動体画像Mを切り出す。CG映像作成部320は、材料データ格納部330内に用意された背景画像Bkに動体画像Mを合成した初期画像を含むCG映像V2を作成する。映像切替部310は、動体認識がなされた時点で、ディスプレイ装置200に供給する映像を、リアルタイム映像V1からCG映像V2へ切り替える。通行人が、ディスプレイ画面上の自分自身が写ったリアルタイム映像V1に注目すると、やがてCG映像V2へと連続的な移行が行われる。
(もっと読む)
インターホン装置の親機、及びオンターホン装置
【課題】 留守中に異常検知センサが動作した場合や、管理人から呼び出しがあったことを、専用の通知手段を設けることなく帰宅した居住者に通知することができるインターホン装置の親機を提供する。
【解決手段】 モニタ21に表示するためのアイコン画像を記憶するアイコン記憶部28を親機2に設け、親機CPU30は親機2に接続された異常検知センサ3から検知信号を受信したら、映像記憶部27に録画されるカメラ12の撮像映像と同一の時系列でアイコン記憶部28から検知信号に関連付けられた特定のアイコン画像を読み出して映像記憶部27へ録画する。
(もっと読む)
地域警備システム
【課題】住宅分譲地の外まで警戒範囲を広げた場合でも、その特定地域における不審者の存在位置を一目で把握できるようにして、住人にとって必要な警戒だけを実施することにより警備の実効性を高めること。
【解決手段】住宅分譲地11の住人は、各々ID端末Tを所持する。住宅分譲地エリア11を含む地域には、人感センサ41、監視カメラ42及びID通信装置43が多数設置されている。人感センサ41で人が検知されると、管理サーバ31は予め登録されたIDコードを受信したか否かによりその人が住人か非住人かを判別する。そして、非住人であれば、監視カメラ42による画像から得られる人物情報をもとにその存在位置を把握する。非住人が所定条件を満たして不審者と認定されると、地域表示モニタ37の表示画面にはその不審者の存在位置に該当する地図上の箇所に不審者マークを表示する。
(もっと読む)
歩行者検出システム
【課題】大規模な処理を付加することなく、歩行者の検出精度を向上可能な歩行者検出システムを提供すること
【解決手段】赤外線カメラ10によって撮像して得られた画像に基づいて、歩行者を検出する歩行者検出部20を備えた歩行者検出システムであって、歩行者検出部20が、前記画像と、あらかじめ記憶された歩行者の輪郭を模したテンプレートとのマッチングを行い、このテンプレートとの相関値を求める相関値検出部と、前記画像のうち、前記相関値が歩行者とみなすことができるだけ高い画像領域を歩行者候補として検出する高相関領域検出部と、複数の歩行者候補の前記画像上の高さの平均値を求め、この平均値と各歩行者候補の前記画像上の高さとに基づいて、歩行者候補が適性か否か判定し、不適正なものは歩行者候補から棄却する取捨選択処理を実行する取捨選択部と、を備えていることを特徴とする歩行者検出システムとした。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
監視システム
【課題】サーバ装置が得る観測場所の映像と共に、監視者が災害を予測する上で必要な多くの判断材料を提供する。
【解決手段】この監視システムは、観測場所に設置され、その場所の映像を撮影する撮像機器と、観測場所に設置され、その場所で観測データを取得する観測設備と、サーバ装置と、監視場所に設置され、撮像機器から送られてくる映像を監視するための監視機器と、監視機器に伝達するための文字情報および/または音声情報、サーバ装置に通報のための条件設定を行う端末とをネットワークで接続したものである。
(もっと読む)
監視画像表示装置
【課題】各監視カメラからの画像を直感的に確認でき、監視地区の状況を容易に把握可能な監視画像表示装置を提供する。
【解決手段】カメラマーク部37のカメラマーク位置決定部38は、各監視カメラの位置情報に基づいて地図画像上での各監視カメラのカメラマークの位置を決定する。画像位置決定部41は、各監視カメラの撮影方向情報に基づいて、当該カメラマークの位置に対して撮影方向側に監視画像の画像位置を決定する。合成部47は、複数の監視カメラの各々について決定されたカメラマークの位置及び画像位置に応じて、地図画像に複数の監視カメラのカメラマーク及び監視画像を合成する。
(もっと読む)
車載カメラ装置の画像調整装置及び方法、並びに車載カメラ装置
【課題】車載カメラ装置において、車載カメラで撮影された画像や、該画像に重畳されて表示される車幅線や距離目安線などの図形を、車両への車載カメラの取付け位置、車幅などに応じて調整する作業を軽減する。
【解決手段】車載カメラの車両への種々の取付け位置や種々の車幅などに対応した画像処理パラメータ、図形処理パラメータを保持した記憶手段45を備える。ユーザは、操作手段20を操作して車両情報や車載カメラの取付け位置情報を入力する。制御手段33は、入力された車両情報や取付け位置情報ももとに、記憶手段45から所定の画像処理パラメータや図形処理パラメータを呼び出して、画像処理手段31や図形処理手段32に送る。画像処理手段31は、画像処理パラメータをもとに画像を調整処理し、図形処理手段32は、図形処理パラメータを基に画像に重畳して出力する図形を調整処理する。
(もっと読む)
計測マップ生成装置及び走行環境確認装置
【課題】歪曲のある広角画像からリアルタイムに世界座標系の座標値を得ること。
【解決手段】 座標関係式20とそれぞれのパラメーターとを使用して、広角画像10の画像座標値[Ud, Vd]を歪曲平面座標値[Xcd, Ycd]に変換する歪曲平面化処理30と、前記歪曲平面座標値[Xcd, Ycd]を理想平面座標値[Xcm, Ycm]に変換する理想平面化処理32と、前記理想平面座標値[Xcm, Ycm]を前記世界座標値[Xwm, Ywm, Zwm]に変換する世界座標化処理34とを備えると共に、前記各画像座標値[Ud, Vd]の前記世界座標値[Xwm, Ywm, Zwm]を前記計測マップ38として前記記憶部14に格納するマップ生成処理36を備えた。
(もっと読む)
車両周辺表示装置
【課題】車両周辺の視界の確保を図り、車両周辺画像作成のための処理能力を低減できる車両周辺表示装置を提供する。
【解決手段】描画回路4は、例えば、トランスミッションのシフト位置がリバースポジションにあるときに、後方画像表示領域20の車両後方画像の歪みを履歴表示領域30の画像に与え、履歴データに基づいた抽出された白線31を、後方画像表示領域20に表示されている白線21に対して連続して表示されるように履歴表示領域30に描画する。
(もっと読む)
車幅線調整方法、車載カメラ装置及びプログラム
【課題】車載カメラ装置において、撮影した画像に重畳して表示する2本の線幅線の調整の簡単化を実現する。
【解決手段】撮像素子で撮像した画像に車幅の目安を示す2本の車幅線を重畳し、表示装置にて表示させる車載カメラ装置において、この2本の車幅線の角度および幅を連動して調整するようにする。具体的には、車幅線の始点のX座標と終点のX座標とを異なるステップ量で更新することにより、2本の車幅線の角度および幅を連動して調整する。また、操作部上のボタン押下の度に、車幅線の始点のX座標と終点のX座標をそれぞれ異なる所定のステップ量ずつ更新する。さらに、車幅線のX座標の値により、更新するステップ量を変更する。
(もっと読む)
車両検知装置、車両検知システム、車両検知装置の車両検知方法および車両検知プログラム
【課題】画像センサから見て他の車両に隠れている車両を検知できるようにすることを目的とする。
【解決手段】第1画像センサ110は交差点付近に道路の進行方向と逆向きに設置され、走行車両を正面から撮像する。第2画像センサ111は交差点付近の道路脇に道路に向けて設置され、走行車両を側方から撮像する。画像センサデータ処理部210は撮像された道路画像119を入力し、入力した道路画像119に基づいて車両情報211を生成する。座標地図部310は車両情報211に基づいて車両情報テーブル391を更新し、道路画像119に基づいて車両をプロットしたメッシュ地図データ392を更新する。追尾処理部320は車両情報211と旧車両情報テーブルとに基づいて検知漏れした車両と撮像範囲を通過した車両とを検出する。追尾処理部320は検知漏れ車両と通過車両とについて車両情報テーブル391とメッシュ地図データ392とを更新する。
(もっと読む)
ヘッドマウントディスプレイ
【課題】表示画面上に定点カメラで撮影された画像を視覚的に分かりやすく表示することができるヘッドマウントディスプレイを提供する。
【解決手段】メイン処理が実行されると、現在位置が取得され(S11)、進行方向が取得される(S12)。進行方向に変化がない場合(S13:NO)、進行方向が記憶される。そして、定点カメラから位置情報を受信したか否かが判断される(S15)。進行方向に変化があった場合(S13:YES)、進行方向が記憶され、表示画像テーブルがクリアされる(S14)。定点カメラ情報を受信した場合(S15:YES)、カメラ画像の撮影方向と進行方向とに基づいて、撮影方向がRAMに記憶される。そして、定点カメラとの距離が算出され(S24)、進行方向基準画像テーブル設定処理が行われる(S25)。次いで、画像入替処理(S26)、画像表示処理が実行される(S27)。
(もっと読む)
1 - 20 / 36
[ Back to top ]