
Fターム[5C122EA59]の内容
Fターム[5C122EA59]に分類される特許
121 - 140 / 2,070
画像処理装置、画像処理方法及びプログラム
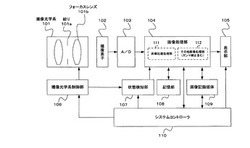
【課題】画像回復処理による画像データの過回復を低減させる。
【解決手段】画像処理部104は、撮像条件に対応する画像回復フィルタを用いて、撮像された画像データに対して画像回復処理を行う。そして、画像処理部104は、画像回復処理後に適用されるガンマ補正処理の特性に応じて決定される変化量の制限値に基づいて、画像回復処理による画像データの信号値の変化量を制限する。
(もっと読む)
画像処理装置

【課題】 ディスプレイと使用者との距離に応じて、ディスプレイへ表示する撮像画像の範囲を変化させることのできる画像処理装置を提供する。
【解決手段】 実施形態の画像処理装置は、ディスプレイ1と、ディスプレイ1の背面中央に設置され、ディスプレイ1の後方を撮影する背面カメラ2とを備える。使用者距離測定部3が、ディスプレイ1と使用者との距離を測定し、被写体距離測定部4が、背面カメラ2と被写体との距離を測定し、ディスプレイ投影範囲算出部5が、使用者距離測定部3および被写体距離測定部4の測定結果にもとづいて、使用者から見て被写体上に投影されるディスプレイ1の外形範囲をディスプレイ投影範囲として算出する。画像データ抽出部6が、背面カメラ2の撮像データからディスプレイ投影範囲の画像データを抽出し、表示部7が、画像データ抽出部6により抽出された画像データをディスプレイ1へ表示する。
(もっと読む)
通信ライン信頼性確認装置及びその方法
【課題】電気接点を介した通信を利用したファームアップにおいて、通信ラインの信頼性を確認する装置及びその方法を提供する。
【解決手段】ステップT01において、テストデータをブロック単位で送受信する。ステップT02において、送信とともにテストデータに誤りがあるか否かを検出する。ステップT02において、誤りがあると判断されると、ステップT03に進む。ステップT03において、誤りが所定割合より小さいとき、通信ラインが正常であると判断される。ステップT03において、誤りが所定割合より大きいとき、通信ラインが異常であると判断される。
(もっと読む)
画像処理システム、車両用装置、画像処理装置、プログラム、及び、画像表示方法
【課題】比較的コストの低い車載装置を用いて仮想視点からみた合成画像を表示させる。
【解決手段】画像処理システム10は、車両9で用いられる車載装置2と、車載装置2とは別個に構成される可搬性装置3とを備えている。車載装置2は、複数の車載カメラ5でそれぞれ得られた複数の撮影画像を可搬性装置3に送信する。可搬性装置3は、これら複数の撮影画像に基づいて仮想視点からみた合成画像を生成する。そして、可搬性装置3は生成した合成画像を車載装置2に返信し、車載装置2がこの合成画像をディスプレイ29に表示する。したがって、車載装置2が合成画像を生成する機能を備えなくとも、合成画像をディスプレイ29に表示させることができる。これにより、比較的コストの低い車載装置を用いた場合であっても、合成画像をディスプレイ29に表示させることができる。
(もっと読む)
カメラ本体およびカメラシステム
【課題】異なる通信方式対応の交換レンズや通信端子の形状が異なる交換レンズを接続可能にして、適切な撮影を可能にする。
【解決手段】第1交換レンズとの通信を可能にする第1電子端子と、第2交換レンズとの通信を可能にする第2電子端子と、を有し、第1電子端子と第2電子端子とは、互いに形状が異なる、または、互いに異なる通信方式に対応しており、第1交換レンズの回動軌跡と、第2交換レンズの回動軌跡とが互いに重ならないように装着口に対する第1電子端子および−第2電子端子が設けられている。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】露光時間の異なる撮像素子を用いて撮像された画像の動きを、より精度よく検出することができるようにする。
【解決手段】複数の露光時間を有する複数の画素を規則的に配置することにより構成された撮像素子により撮像された画像の被写体を構成する画素の値を近似する近似式を生成し、注目画素の値、並びに、注目画素と露光時間が異なる画素を含む周辺画素であって、注目画素とは時間的または空間的に異なる位置に存在する複数の周辺画素のそれぞれの値を取得し、注目画素および周辺画素のそれぞれの露光時間を取得し、注目画素と周辺画素との間の距離である画素間距離、取得された画素値、取得された露光時間に基づいて撮像画素像の被写体の注目画素における移動速度を算出し、移動速度に基づいて、被写体の単位時間当たりの動き量を特定する。
(もっと読む)
カメラシステム、情報処理システム、カメラ本体
【課題】ユーザを煩わせることなくカメラユニットへ機能追加をすることが可能なカメラシステムを提供すること。
【解決手段】ボディの動作を制御する第1のボディ制御プログラムが第1領域に記憶された第1の不揮発メモリ62と、CPU42と、互いのバージョンが調整された、第2のボディ制御プログラム、及び、カメラユニットの動作を制御する第2のカメラユニット制御プログラムを記憶した第2の不揮発メモリ43から、カメラユニットに送信する第1のプログラム送信手段85と、第2のボディ制御プログラムを第2領域に記憶するプログラム記録手段87と、前記第2のカメラユニット制御プログラムにより予め記憶されている第1のカメラユニット制御プログラムを更新するプログラム更新手段81と、を有することを特徴とする。
(もっと読む)
携帯情報機器
【課題】 カメラ機能を用いて撮像処理を行う際、ズーム倍率に基づいて縮尺表示を行い、撮像対象物のスケール表示やこの携帯情報機器から撮像対象物までの距離を測量することができる携帯情報機器を提供する。
【解決手段】 携帯情報機器は、ズーム倍率を自在に設定して撮像可能な撮像手段と、前記撮像手段に設定されているズーム倍率に基づいて長さの縮尺表示を作成する作成手段と、前記撮像手段により撮像されている撮像画像、及び、前記作成手段により作成された縮尺表示を重ねて表示する表示手段と、撮像対象物の実際の長さをユーザに入力させるための入力欄を前記表示手段に表示させる制御部と、を備え、前記制御手段は、前記入力された前記撮像対象物の実際の長さと、前記ズーム倍率と、前記撮像画像の前記表示手段上の長さとに基づいて前記撮像対象物までの距離を算出し、前記表示手段は、前記縮尺表示と前記算出された距離とを前記撮像画像に重ねて表示する。
(もっと読む)
撮像装置、撮像制御方法、及びプログラム
【課題】容易に所望する被写体の表情を撮影可能な撮像装置、撮像制御方法、及びプログラムを提供する。
【解決手段】撮像装置は、撮像部10と、制御部20と、記憶部30と、音声出力部50とを備える。制御部20は、撮像部10により出力された画像データに基づいて、被写体の顔の特徴量を取得する。そして、取得した特徴量と基準特徴量との差分に基づいて、表情評価値を取得する。表情評価値が基準評価値よりも大きいと判別した場合、画像データを記憶部30に記憶させる。表情評価値が基準評価値よりも大きくないと判別した場合、被写体に対しさらに前表情評価値が大きくなる表情を作るように促す旨の音声メッセージを音声出力部50から出力させる。
(もっと読む)
レンズ繰出し装置、該レンズ繰出し装置を備えた撮像装置、並びに携帯電子機器
【課題】本発明は、弾性体による繰出しリングの付勢力を十分確保し、弾性体による繰出しリングの光軸方向の変位を得ることができるレンズ繰出し装置、撮像装置、携帯電子機器を提供する。
【解決手段】ホルダ4が繰出しリング3を回動自在に支持し、操作レバー5による繰出しリング3の回転で、繰出しリング3とホルダ4の何れか一方に形成されたカム面6A,6Bと、何れか他方に形成された当接部7との係合位置が切り換えられ、繰出しリング3が保持するレンズユニット2が光軸方向に変位する。繰出しリング3の外周には載置面3cが形成され、載置面3c上に弾性体8が配置され、該弾性体8が押圧手段9に当接支持される。載置部3cと押圧手段9の対向面9dのそれぞれに、複数の突出部3d,…,9e,…が形成され、複数の突出部3d,…,9e,…間に弾性体8が配置される。
(もっと読む)
防振制御装置、光学機器、撮像装置、および防振制御方法
【課題】小型で機動性が高く、焦点距離や振れ補正範囲の変化によらずに、平行振れに対して高精度な像ブレ補正を行える防振制御装置および撮像装置を提供する。
【解決手段】角度振れ補正量算出部は、撮像光学系の光軸に対して直交する軸を中心とする装置の回転に伴って生じる角度振れを検出して像ブレの補正量を算出する。また平行振れ補正量算出部は、撮像光学系の光軸に対して直交する方向に沿う装置の並進に伴って生じる平行振れから像ブレの補正量を算出する。推定器905は振動モデルに基づくオブザーバ手段によって平行振れを推定する。平行振れ補正量算出部は、オブザーバ手段から得られる前記平行振れの推定量に基づいて平行振れの補正量を算出し、撮像光学系の焦点距離や振れ補正部111の補正範囲に応じて平行振れの補正量を変更する。平行振れの補正量は角度振れの補正量と合成され、振れ補正部111が駆動制御される。
(もっと読む)
防振アクチュエータ、及びそれを備えたレンズユニット、カメラ
【課題】周波数の高い振れを効果的に抑制することができる防振アクチュエータを提供する。
【解決手段】本発明は、防振アクチュエータ(10)であって、固定部(12)と、像振れ防止用レンズ(16)が取り付けられた可動部(14)と、この可動部を移動可能に支持する可動部支持手段(18)と、可動部を駆動する駆動手段(20,22)と、可動部の位置を検出する位置センサー(24)と、振れ角速度を検出する角速度センサー(34)と、加速度を検出する加速度センサー(32)と、加速度検出信号の低周波成分を除去するローカットフィルター(40)と、位置検出信号のフィードバックに基づいて、角速度センサーによって検出された振れを補正すると共に、加速度検出信号に基づいて、駆動手段に推力を発生させる制御手段(36)と、を有し、ローカットフィルターは、フィードバックにより振れ補正可能な低周波数成分を除去することを特徴としている。
(もっと読む)
撮像装置
【課題】適切な回転方向の手振れ補正を行える撮像装置を提供する。
【解決手段】撮像装置(100)は、光学系(110)と、光学系を介して結像された像を撮像し、画像データを生成する撮像素子(140)と、自装置の回転方向の振れを検出する検出部(250)と、撮像素子により生成された画像データの領域中の所定の切り出し領域のデータを切り出す切り出し部(160、180)と、切り出した画像データを記録媒体(200)に記録する記録部(180、190)とを備える。切り出し部は、所定の条件(例えば、光学系の焦点距離や撮像装置の動きの量)に応じて回転中心位置を決定し、回転中心位置を中心として、検出部により検出された回転方向の振れの前記撮像素子上で結像された像への影響を低減させるように、切り出し領域を回転させ、当該回転後の切り出し領域から画像データを切り出す。
(もっと読む)
顕微鏡装置及び画像形成方法
【課題】広視野の超解像画像が得られる顕微鏡装置を提供する。
【解決手段】本発明の顕微鏡装置は、活性化光及び励起光の照射、又は励起光の照射により蛍光を発する蛍光物質を含む試料に、活性化光及び励起光、又は励起光を照射する照明光学系と、試料の観察領域の蛍光画像を撮像する撮像装置と、試料に励起光を繰り返し照射することにより取得された複数の蛍光画像の各々において蛍光輝点の位置を解析し、分子リストとして構築する画像解析装置と、複数の観察領域において取得された複数の分子リストを、分子リスト同士が重なり合う領域における分子リスト間の蛍光輝点同士の距離に基づいて算出した位置補正情報を用いて連結する画像連結装置と、を備えたことを特徴とする。
(もっと読む)
防振制御装置、光学機器、撮像装置、及び防振制御方法
【課題】オートフォーカス動作中に生じる像倍率の急激な変化に伴う防振制御性能の低下を軽減しつつ、平行振れに対して高精度な像ブレ補正を行うこと。
【解決手段】撮像装置は角速度計108pと加速度計109pにより、装置に生じる角度振れと平行振れを検出する。角度振れ補正係数算出部313は角度振れに対する補正係数を算出し、平行振れ補正係数算出部314は平行振れに対する補正係数を算出する。カメラCPU106は、各補正係数を用いて角度振れ及び平行振れに対する補正量を演算する際、撮像光学系の合焦度を示す情報を取得し、合焦度が高い場合の補正係数に比べて、合焦度が低い場合の補正係数を小さくすることで補正量の変化を抑制する。角度振れ及び平行振れに対する補正量に従って駆動部112は振れ補正部110を駆動し、撮像光学系の像面に生じる像ブレを補正する。
(もっと読む)
撮像装置、プログラム及び手振れ補正方法
【課題】重力成分の影響を適切に判断して手振れ補正の補正精度を向上させることができる撮像装置を提供する。
【解決手段】被写体像を撮像する撮像素子と、装置本体における角速度及び加速度を検出する検出手段と、装置本体の姿勢を判定する判定手段と、検出された角速度及び加速度に基づいて、撮影光軸を回転させる角度ブレ及び撮影光軸を平行移動させるシフトブレが含まれるブレ量を、判定された姿勢に応じて、手触れ補正を行う方向の重力の影響の度合いに応じた重力成分を調整して算出する算出手段と、算出されたブレ量に基づいて手振れを補正する補正手段と、を備えた。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム、並びに記録媒体
【課題】撮影条件に応じて最適な初期フレームを選択する。
【解決手段】制御部5は、撮像素子1、信号処理回路9、及びデータ処理回路10等を駆動制御して、予め決めた枚数のフレーム画像を時系列的に取得し、FIFOメモリ10aに一連のフレーム画像を記憶する。主要被写体推定抽出処理部5aは、FIFOメモリ10aに記憶した各フレーム画像に基づいて主要被写体領域を推定する。このとき、一連のフレーム画像を予め決めた枚数分取り込むときの基準となる初期フレーム画像を、一連のフレーム画像を取得する時のフォーカスモードに応じて切り換えるように制御する。
(もっと読む)
画像合成装置、その制御方法、および制御プログラム
【課題】動画像を合成する際、合成枚数に拘わらず処理時間およびメモリへのデータ転送量が増大することなく画像合成処理を行う。
【解決手段】画像合成装置は、複数のフレームを有する動画像が入力画像としてされ、入力画像において予め設定された数のフレームを合成して合成画像を得る。画像加算部109は予め設定された数のフレームを合成して第1の合成画像を得る。画像加算部および画像減算部110は第1の合成画像が得られた後、別の1つのフレームの画像の合成を行う際、第1の合成画像に関して第1の合成画像における所定のフレームの画像を減算するとともに、別の1つのフレームの画像を加算して合成画像とする。
(もっと読む)
撮像装置、撮像システム、撮像装置の制御方法、撮像システムの制御方法、およびプログラム
【課題】撮像後に、撮像時に取得した位置情報よりも高い精度の位置情報が取得されたとしても、撮像画像に対応付けて記憶される位置情報は撮像時に取得した精度の低い位置情報のままになってしまっていた。
【解決手段】撮像により画像データを生成する撮像部と、撮像部による撮像の際の撮像装置の第1の位置情報を取得する第1の取得部と、撮像部により生成された画像データと第1の位置情報とを関連付けて記憶する記憶部と、第1の取得部により第1の位置情報を取得した後に、撮像部による撮像の際の撮像装置の第2の位置情報を取得する第2の取得部と、第2の位置情報の精度が第1の位置情報の精度よりも高い場合、記憶部により画像データと対応付けて記憶された第1の位置情報を、第2の位置情報に更新する更新部と、を有する。
(もっと読む)
撮像装置、撮像装置の製造方法、画像処理装置、及びプログラム、並びに記録媒体
【課題】焦点検出用画素の位置に対応する撮像用画素の画素値を補間するためのパラメータをレンズ条件毎に簡便にもつ。
【解決手段】撮像素子15は、複数の撮像用画素及び複数の焦点検出用画素を有し、撮影レンズ14により結像する被写体像を撮像してベイヤー配列画像を得る。不揮発性メモリ12は、焦点検出用画素の位置を各々記憶する。また、不揮発性メモリ12は、焦点検出用画素の画素値を、その周囲の撮像用画素の画素値を用いて補間する時に使用するパラメータをレンズ条件毎に対応付けして記述したテーブルを記憶する。AF画素補間部40は、撮影時に取得するレンズ条件に基づいてテーブルからパラメータを決め、決めたパラメータを用いて焦点検出用画素の位置に対する撮像用画素の画素値を補間する。
(もっと読む)
121 - 140 / 2,070
[ Back to top ]