
Fターム[5C122HA78]の内容
Fターム[5C122HA78]に分類される特許
21 - 40 / 1,514
信号処理装置、レンズ制御装置、撮像装置
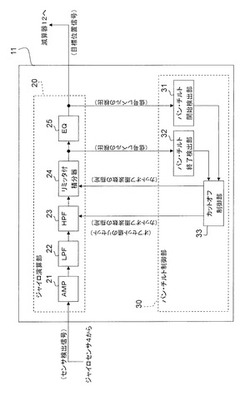
【課題】振れ量を検出するセンサの検出信号に基づいて目標位置信号を生成する信号処理装置であって、パンニングやチルティング等に適切に対処することが可能となる信号処理装置を提供する。
【解決手段】振れ量を検出するセンサおよび振れ補正用可動部品を有した撮像装置に設けられ、該センサの検出信号に基づいて、該振れ補正用可動部品の目標位置を表す信号を生成する信号処理装置であって、カットオフ周波数が可変であり、前記検出信号に高域通過のフィルタ処理を施すハイパスフィルタと、前記検出信号の積分値のレベルが所定の閾値を超えたときに、前記カットオフ周波数を高くし、該積分値のレベルが該閾値以下となったときに、前記カットオフ周波数を元に戻すカットオフ周波数制御部と、を備えた信号処理装置とする。
(もっと読む)
撮像装置、撮像装置の制御方法および撮像システム

【課題】 被写体追従と像振れ補正が両立した撮影を可能にする。
【解決手段】 撮像装置100の撮影条件の設定を補助するサーバーコンピュータにネットワークを介して接続され、サーバーコンピュータから被写体移動速度情報を受信することが可能な情報受信手段260と、像振れを補正する振れ補正機構を備えた撮像装置の振れを検出する振れ検出手段130と、情報受信手段により受信された被写体移動速度情報に基づいて撮像装置の被写体追従判定閾値を計算する閾値計算手段109と、振れ検出手段により検出された被写体移動方向の振れが被写体追従判定閾値より大きい場合には、振れ補正機構に被写体移動方向の振れ補正を行わせない制御手段109とを有する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】鑑賞者が所望する視点で撮影されたのと等価な画像を容易に得ること。
【解決手段】オブジェクト画像取得部61は、光軸方向を視点とする撮像画像を撮像する撮像部101及び撮像画像のデータを送信する送信部104を備えたオブジェクト11であって、姿勢変化をしながら移動し得るオブジェクト11から逐次送信される撮像画像のデータを、オブジェクト画像のデータとして逐次取得する。オブジェクト画像加工部62は、オブジェクト画像取得部61により逐次取得されたオブジェクト画像のデータを加工することで、オブジェクト又はそれ以外の物体(実物体又は仮想物体)に配置された仮想視点が所定の移動方向に移動しながら所定の眺望方向を眺めた様子を表わす画像のデータを、視点変換画像のデータとして生成する。出力制御部71は、オブジェクト画像加工部62により生成された視点変換画像のデータを出力する制御を実行する。
(もっと読む)
撮像ガイド装置、撮像装置、撮像ガイド方法、プログラム
【課題】同一地点での同一視野の撮像が的確に実行できるようにユーザをガイドする装置の実現。
【解決手段】例えば最初の撮像時に、記録画像に関連づけられた情報として、記録画像内で設定されたターゲット画像の画像内容を示すターゲット画像データ、及び記録画像を表示した際のターゲット画像の表示上の位置を示す表示位置情報を含むターゲット情報を記憶する。同一地点での撮像時には、現在の撮像画像データとして入力される被写体モニタリング画像と、上記表示位置情報に基づくマーカー表示と、被写体モニタリング画像におけるターゲット画像データに該当する画像部分がターゲット画像であることを提示するターゲット表示とを含む撮像視野誘導表示を行う。マーカー表示とターゲット表示によって過去の撮像と同一視野となるようにユーザを誘導する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】固定具を用いることなくパノラマ撮像を行った場合であっても、ずれの生じないパノラマ画像を生成すること。
【解決手段】デジタルカメラ1は、パノラマ画像を合成するための複数の画像データを取得する画像取得部52と、画像取得部52が画像データを取得したタイミングにおけるデジタルカメラ1の傾き量を取得する傾き取得部53と、画像取得部52が取得した画像データ同士を合成する際に、傾き取得部53が取得した傾き量に基づいて当該画像データを回転補正する補正部54と、補正部54により回転補正された画像データ同士を合成する合成部56と、を備える。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】画像を合成する際の位置合わせの精度を向上すること。
【解決手段】デジタルカメラ1は、取得部52により順次取得された画像データ夫々における、隣接する画像データ同士の合成部分内で生成部58により合成位置を推定する推定部53と、推定部53により推定された合成位置を基準として、合成部分内で所定方向に画素データをずらしながら、合成部分内における画像データ同士の画素値のSADを算出する算出部54と、算出部54により算出された画素値のSADの値が最小となる画像データ同士の位置が合成位置となるように調整する調整部57と、調整部57により調整された合成位置に基づいて、隣接する画像データ同士を合成し、パノラマ画像の画像データを生成する生成部58とを備える。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】角画像を生成する際における撮像のやり直しが発生する可能性を低減できる撮像装置、画像処理方法及びプログラムを提供すること。
【解決手段】広角撮像モード中にユーザがデジタルカメラ1を移動させると、撮像画像制御部113Aは、当該移動に併せて現在撮像中の撮像画像を表示部19に移動表示し、ルート制御部113Bは、この撮像画像の移動に追従させてルートを撮像方向と直交する方向に移動して表示部19に表示する。このとき、報知部115は、デジタルカメラ1の撮像方向と直交する方向の移動量が不適切である場合には、ユーザに対してその旨を報知する。
(もっと読む)
情報提供システム
【課題】情報提供効果の向上を図ること。
【解決手段】本発明における情報提供システムは、情報提供装置と、カメラ部及び端末側表示部を備えた携帯端末と、を備え、上記携帯端末は、自端末の姿勢を検出する姿勢検出手段と、この姿勢検出手段にて検出された姿勢情報の送信及び外部情報の受信を行う第一の無線通信手段と、を備えると共に、上記情報提供装置は、姿勢情報の受信及び姿勢情報に応じて予め記憶した提供情報の送信を行う第二の無線通信手段を備える。そして、上記携帯端末は、カメラ部にて取り込んだ表示用情報と第一の無線通信手段にて受信した提供情報を重畳して端末側表示部に表示する重畳表示手段を備える。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】撮影を行わない状態での不要な撮影動作の実行を防止することができる。
【解決手段】表示パネル62は、その上面にタッチパネル61を備える。撮像部4の撮像素子41は、画像を撮像する。ジャイロセンサ8は、当該撮像装置1の移動を検出する。制御部2は、ジャイロセンサ8により当該撮像装置1の移動が検出された場合には、タッチパネル61上で行われるタッチ操作に対して、撮像部4による撮像動作を禁止する。一方、制御部2は、ジャイロセンサ8により移動が検出されなかった場合には、タッチパネル61上で行われるタッチ操作に対して、撮像部4による撮像動作を実行する。
(もっと読む)
画像安定化のための方法とシステム
【課題】画像安定化において、簡単な方法及びシステムを提供すること。
【解決手段】露光期間中のカメラ運動を検出するために動きセンサーが使用される。カメラは1以上の露光を形成するための画像センサーを有する。運動が一定の範囲内にあるとき、露光は1以上のフレームを供給するために使用され、画像がそのフレームに基づき構成される。1つの実施例において、幾つかの画像フレームをキャプチャするために、露光期間は幾つかの短い間隔に分割され、カメラの位置が所定の範囲内にあるときキャプチャされた画像フレームのみが、最終画像を形成するために使用される。個別のフレームの動きぼやけ劣化を低減するために、各フレームにおける露光時間は少ない。カメラが安定しており、場面に対し実質的に静止している場合、全て又は多くの短いフレームが最終画像を形成するために使用される。
(もっと読む)
電気機器
【課題】部品を良好に駆動させることができる電気機器を提供する。
【解決手段】本発明のレンズ鏡筒3は、第1の周波数の信号を出力するモニタアンプ124を有する角速度センサ12と、駆動信号により駆動する振動波モータ25と、を備える。振動波モータ25は、モニタアンプ124から出力された第1の周波数の信号が入力される入力部を有し、入力部により入力された信号を駆動信号として駆動することで、駆動信号の周波数を、角速度センサ12の周波数と等しくする。
(もっと読む)
画像処理装置および撮像装置、ならびに画像処理方法
【課題】撮影時に生じた手ぶれ等を含んだ連写画像であっても、背景領域から動体領域を高精度かつ簡易に抽出して1枚の画像に合成できる画像処理装置および撮像装置、ならびに画像処理方法を提供する。
【解決手段】画像処理装置4は、動体を連続撮影した複数の静止画像からなる連写画像を縮小して縮小連写画像を作成するサイズ縮小部41と、複数の縮小連写画像から動体領域を抽出して縮小動体抽出マスク画像を作成するマスク作成部42と、縮小動体抽出マスク画像を拡大し、サイズ縮小部41で縮小する前の大きさに復元して動体抽出マスク画像を作成するサイズ復元部43と、動体抽出マスク画像を利用して連写画像から動体領域を抽出し動体画像を得るとともに、動体画像を連写画像の所定の1枚に合成する合成部44と、を備えることを特徴とする。
(もっと読む)
画像処理装置及び画像処理方法、並びにプログラム
【課題】合成後の広角画像の繋ぎ合わせの部分の違和感を低減する。
【解決手段】撮像装置1は、複数の画像のデータを所定方向に合成してワイド画像のデータを生成し、エネルギー算出部52は、複数の画像のデータにおける一の画像と当該一の画像の合成対象である他の画像とに基づいて、一の画像内の注目画素に対応したエネルギーを夫々算出する。エネルギー最小経路探索部54と、注目画素のエネルギーが最小となるエネルギー最小経路Rを探索する。範囲探索部55は、エネルギー最小経路Rにおける一の画像内の各注目画素の値と類似する値を有する画素の範囲を探索する。αブレンド幅決定部56は、エネルギー最小経路を起点とするブレンド幅を決定する。透過度設定部58は、ブレンド幅に基づき、他の画像に対する一の画像の透過度を設定する。合成部59は、ブレンド幅と透過度とに基づいて、一の画像と他の画像とを合成する。
(もっと読む)
撮像装置およびその制御方法
【課題】行中の像振れ補正制御をユーザが容易に認識出来るようにする。
【解決手段】実行可能な複数の像振れ補正モードを有する撮像装置は、撮影の状況に応じて、実行可能な複数の像振れ補正モードから実行すべき像振れ補正モードを選択し、選択した像振れ補正モードを実行する。撮像装置は、複数の像振れ補正モードの各々に対応付けた複数の表示アイテムを有し、実行中の像振れ補正モードに対応する表示アイテムを表示画面に表示する。
(もっと読む)
撮影用照明装置及び撮影装置
【課題】手ブレを起こさずに、効果的な撮影が行える。
【解決手段】被写体を照明する発光部と、被写体光を測光する測光部と、振れを検出する振れ検出部と、前記振れ検出部の出力に基づいて、固定状態にあるか否かを判定する固定状態判定部(S104)と、前記測光部からの前記被写体光が低輝度であって(S103:YES)、前記固定状態判定部が固定状態と判定した場合には(S104:YES)、前記発光部を発光させるとともに、シャッタスピードを遅く設定する制御部(S105)と、を備えた。
(もっと読む)
移動物体追跡装置及び参照点追跡方法
【課題】移動物体上のある点に対して移動物体の移動速度方向から所定角度だけ回転した方向に所定長離れた点の位置を精度良く把握可能な移動物体追跡装置を提供する。
【解決手段】移動物体の所定の部位を画像追跡点として撮像し、取得した画像追跡点の画像データより、追跡のための追跡原点座標と移動物体の画像追跡点の座標との差異を表す追跡誤差を得る。この追跡誤差に基づいて、追跡角速度に移動物体に対する撮像器の追従遅れを補正した視軸角速度を算出する。同時に、移動物体との間の相対距離と、移動物体追跡装置自身の移動速度を計測する。得られた視軸角速度と相対距離と移動物体追跡装置自身の移動速度に基づいて、画像追跡点から移動物体の移動速度方向から所定の角度だけ回転した方向に所定長さだけ離れた参照点を追跡するための参照点追跡角度を算出する。
(もっと読む)
レンズ鏡筒および撮像装置
【課題】手振れ補正をより高い精度で行うことが可能なレンズ鏡筒を提供する。
【解決手段】振動を検出して、振動に応じた検出信号を出力する振動検出部220と、光軸と交差する方向に移動可能な振れ補正光学系212を有する振れ補正部と、像振れを補正するように振れ補正部を駆動させる駆動部273と、撮像素子で撮像された画像信号に基づいた被写体の動きベクトル量を受信する受信部と、検出信号に基づいて、像振れ量を演算する像振れ量演算部241と、振れ補正光学系の位置に応じて、振れ補正光学系を、振れ補正光学系の可動範囲中心に移動させるための向心力をバイアス量として演算するバイアス量演算部261と、像振れ量と、バイアス量を重畳した像振れ量との差をバイアス残差として算出するバイアス残差演算部281と、バイアス残差と、動きベクトル量に対応する振れ補正光学系の振れ残差とを比較し、該比較結果に基づいて、バイアス量を変更する制御部281,284とを備えることを特徴とするレンズ鏡筒。
(もっと読む)
撮像装置及び撮像装置のノイズ低減方法
【課題】手ブレ補正機構の駆動音を簡単な構成で除去できる撮像装置及び撮像装置のノイズ低減方法を提供する。
【解決手段】本発明の撮像装置10は、ブレ補正動作を行うブレ補正機構21と、前記ブレ補正機構21の駆動時の音声を集音可能な集音部15M,15と、前記ブレ補正機構21の駆動時の音声より、前記ブレ補正機構21の駆動音を求める駆動音抽出部33と、前記駆動音抽出部33で求められた前記駆動音を記憶する記憶部16と、前記記憶部16に記憶された前記駆動音に基づいて、動画撮影時において前記集音部15M,15で集音される音声から、前記ブレ補正機構21の駆動音によるノイズを除去するノイズ低減処理を行う低減処理部34と、を備えること、を特徴とする。
(もっと読む)
ブレ補正装置及び光学機器
【課題】良好なブレ補正が可能なブレ補正装置及び光学機器を提供する。
【解決手段】本発明のブレ補正装置30は、光学機器1に作用する角速度を検出する角速度検出部25と、前記角速度検出部25による検出信号ω0から所定の周波数成分を抽出して出力する信号抽出部61と、前記信号抽出部61の出力信号ω3を利得調整して出力する利得調整部62と、前記角速度検出部25による検出信号ω0と前記利得調整部62の出力信号ω5とに基づいてブレ補正量を演算する演算部41と、を備えること、を特徴とする。
(もっと読む)
ブレ補正装置及び光学機器
【課題】良好なブレ補正を実現する。
【解決手段】カメラの角速度を検出する角速度センサ(12B)と、カメラの加速度を検出する加速度センサ(12A)と、前記角速度センサと前記加速度センサの少なくとも1つの出力に基づいて、カメラの姿勢を演算する姿勢演算部(31)と、前記姿勢演算部の演算結果に基づいて、ピッチ角方向制御軸とヨー角方向制御軸とによって、並進ブレの演算量を変えるブレ補正制御部(S66)とを備えたブレ補正装置を提供する。
(もっと読む)
21 - 40 / 1,514
[ Back to top ]