
Fターム[5C122HA78]の内容
Fターム[5C122HA78]に分類される特許
61 - 80 / 1,514
防振制御装置、光学機器、撮像装置、及び防振制御方法
【課題】オートフォーカス動作中に生じる像倍率の急激な変化に伴う防振制御性能の低下を軽減しつつ、平行振れに対して高精度な像ブレ補正を行うこと。
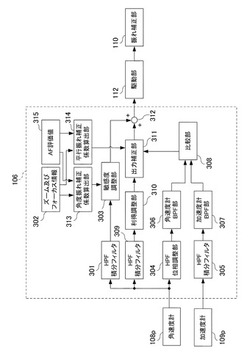
【解決手段】撮像装置は角速度計108pと加速度計109pにより、装置に生じる角度振れと平行振れを検出する。角度振れ補正係数算出部313は角度振れに対する補正係数を算出し、平行振れ補正係数算出部314は平行振れに対する補正係数を算出する。カメラCPU106は、各補正係数を用いて角度振れ及び平行振れに対する補正量を演算する際、撮像光学系の合焦度を示す情報を取得し、合焦度が高い場合の補正係数に比べて、合焦度が低い場合の補正係数を小さくすることで補正量の変化を抑制する。角度振れ及び平行振れに対する補正量に従って駆動部112は振れ補正部110を駆動し、撮像光学系の像面に生じる像ブレを補正する。
(もっと読む)
撮像装置、プログラム及び手振れ補正方法

【課題】重力成分の影響を適切に判断して手振れ補正の補正精度を向上させることができる撮像装置を提供する。
【解決手段】被写体像を撮像する撮像素子と、装置本体における角速度及び加速度を検出する検出手段と、装置本体の姿勢を判定する判定手段と、検出された角速度及び加速度に基づいて、撮影光軸を回転させる角度ブレ及び撮影光軸を平行移動させるシフトブレが含まれるブレ量を、判定された姿勢に応じて、手触れ補正を行う方向の重力の影響の度合いに応じた重力成分を調整して算出する算出手段と、算出されたブレ量に基づいて手振れを補正する補正手段と、を備えた。
(もっと読む)
撮像装置
【課題】適切な回転方向の手振れ補正を行える撮像装置を提供する。
【解決手段】撮像装置(100)は、光学系(110)と、光学系を介して結像された像を撮像し、画像データを生成する撮像素子(140)と、自装置の回転方向の振れを検出する検出部(250)と、撮像素子により生成された画像データの領域中の所定の切り出し領域のデータを切り出す切り出し部(160、180)と、切り出した画像データを記録媒体(200)に記録する記録部(180、190)とを備える。切り出し部は、所定の条件(例えば、光学系の焦点距離や撮像装置の動きの量)に応じて回転中心位置を決定し、回転中心位置を中心として、検出部により検出された回転方向の振れの前記撮像素子上で結像された像への影響を低減させるように、切り出し領域を回転させ、当該回転後の切り出し領域から画像データを切り出す。
(もっと読む)
防振制御装置、光学機器、撮像装置、および防振制御方法
【課題】小型で機動性が高く、焦点距離や振れ補正範囲の変化によらずに、平行振れに対して高精度な像ブレ補正を行える防振制御装置および撮像装置を提供する。
【解決手段】角度振れ補正量算出部は、撮像光学系の光軸に対して直交する軸を中心とする装置の回転に伴って生じる角度振れを検出して像ブレの補正量を算出する。また平行振れ補正量算出部は、撮像光学系の光軸に対して直交する方向に沿う装置の並進に伴って生じる平行振れから像ブレの補正量を算出する。推定器905は振動モデルに基づくオブザーバ手段によって平行振れを推定する。平行振れ補正量算出部は、オブザーバ手段から得られる前記平行振れの推定量に基づいて平行振れの補正量を算出し、撮像光学系の焦点距離や振れ補正部111の補正範囲に応じて平行振れの補正量を変更する。平行振れの補正量は角度振れの補正量と合成され、振れ補正部111が駆動制御される。
(もっと読む)
撮像装置、及びプログラム
【課題】撮影までのタイムラグが発生せず、かつ、把持位置とタッチ位置との距離による手振れ量に対応した手振れ補正を行う。
【解決手段】制御部2は、レリーズ操作(オートフォーカスの対象となる被写体を選択するとともに撮影指示を合わせて行う)をタッチパネル61上で行う場合に、撮像装置の把持位置(ジャイロセンサ8で検出)とタッチパネル61上のレリーズ操作位置との距離に応じて変化する手振れ量を算出し、該手振れ量に応じて手振れ補正量の予測演算を行う。この結果、把持位置とタッチパネル61上のレリーズ操作位置との距離に応じて手振れ補正量を変化させる。
(もっと読む)
防振装置、光学機器
【課題】大きな記憶容量を必要とすることなく、設置状態に応じたシャッタスピード使用禁止帯域を設定できる防振装置、光学機器を提供する。
【解決手段】カメラ1及び交換レンズ2は、カメラ1に振動を発生させる絞り6、ミラー7、シャッタ8と、振動を検出する検出器5と、絞り6等を作動させてカメラ1に振動を発生させ、検出器5が検出した振動の出力情報に基づいて、シャッタスピードに対応したカメラ1の振動の大きさを求め、撮影を禁止するシャッタスピードの帯域であるシャッタスピード使用禁止帯域を設ける制御部21とを備える。
(もっと読む)
画像入力装置、会議装置、画像処理制御プログラム、記録媒体
【課題】カメラの高さの変化を含んだ任意の位置での画像処理が可能な画像入力装置を提供すること。
【解決手段】被写体を撮影するカメラ本体77と、被設置面に設置される筐体2と、カメラ本体77をチルト可能に支持させると共に、筐体2に上下方向へ揺動可能に支持されたアーム部71と、第1及び第2の加速度センサS1、S2を備えアーム部71とカメラ本体77の傾きを検出させる傾き検出部Sと、傾き検出部Sが検出した傾きと当該装置の寸法情報とに基づいて、被設置面からカメラ本体77までの高さ高さ距離情報Lを算出し、その算出した高さ距離と傾き検出部Sが検出したカメラ本体77の傾きとからカメラ本体77が撮影する被写体の種類を特定し、その特定した種類の被写体に適した画像処理を実行する制御部を備えて画像入力装置を構成する。
(もっと読む)
撮像装置
【課題】 撮像素子を移動させる手ぶれ補正装置を有する撮像装置において、撮像素子を原点位置に強制的に保持させるための原点保持機構の駆動負荷を低減し、大きな駆動源を要することなく、所要の駆動時間および駆動力を得る。
【解決手段】 撮像素子を移動させる手振れ補正装置における原点保持機構を有する。原点保持機構において、原点保持動作用の第1の圧縮ばね21に対向させて第2の圧縮ばね22を配置し、原点保持時には、ステッピングモータ23からリードスクリュー23aを介して、作動ナット部材35により第2の圧縮ばね22を圧縮させ、圧縮ばね21により、保持状態で必要な保持力量を発生させ、一方、保持解除時点では、最大力量となる圧縮ばね21から作動ナット部材35に印加される力量を対向配置された圧縮ばね22によって減じることができ、ステッピングモータ23の負荷トルクを小さくすることができる。
(もっと読む)
撮像装置、撮像方法およびプログラム
【課題】被写体が動き回る状況下であっても、撮影者が所望する撮影の構図が定まった画像を補助的に提示することができる撮像装置、撮像方法およびプログラムを提供する。
【解決手段】連続して生成される複数の画像データにそれぞれ含まれる画像情報の変化に基づいて、時間の経過とともに画面内で移動する移動被写体を、前記移動方向に応じて定まる主要被写体の候補である主要被写体候補として検出する主要被写体候補検出部103と、主要被写体候補検出部103が検出した主要被写体候補が移動方向判定部102によって判定された移動方向に移動している場合、主要被写体候補を主要被写体として設定する主要被写体設定部104と、主要被写体設定部104が設定した主要被写体が所定の領域に位置する画像を、仮記憶された画像群から検出する画像検出部105と、を備える。
(もっと読む)
光学装置
【課題】
マクロ撮影時の像振れ補正において、迅速で、高精度な像振れ補正が可能な光学装置を提供する。
【解決手段】
3軸タイプの像振れ補正機構を有する光学装置において、像振れ補正制御手段が、角度振れ検出手段により検出する信号のうち、手振れの信号として補正レンズ群の目標位置算出に用いられる信号の周波数の下限を、マクロ撮影の場合とマクロ撮影以外の場合とで変更し、PID制御における演算によって、補正レンズ群の現在位置と、目標位置までの差分から、補正レンズ群移動手段の駆動量を算出する際に加えるゲインを、マクロ撮影の場合とマクロ撮影以外の場合とで変更する。
(もっと読む)
制御装置及び撮像装置及びその制御方法
【課題】PWM駆動制御による出力不感帯においても、フィードバック制御を正確に行うことができ、手ぶれ補正処理の精度向上をより一層図ることのできる撮像装置を提供する。
【解決手段】本発明の撮像装置は、撮像素子101を有して撮影光軸に直交する方向にモータにより可動される可動部1251と、撮像素子の位置を検出値として検出する位置検出部1252と、手ぶれによる撮像装置本体の振れ量に対応する目標値を検出する目標値算出部1241と、PWM駆動制御を用いてフィードバック制御を行うために検出値と目標値との差を演算してデューティ比を求める演算部1043と、モータ1255にデューティ比に応じた電流を流すことにより可動部1251を駆動する駆動部1254とを有する。演算部1043には、検出値と目標値との差により求められたデューティ比を補正することにより出力不感帯を除去する補正部1043Hが設けられている。
(もっと読む)
情報処理装置、サーバシステム、画像処理システム及びプログラム
【課題】 撮像画像に対して切り出し範囲を設定し、設定した切り出し範囲の画像情報をサーバシステムに対して送信することでネットワークの帯域の圧迫等を抑止できる情報処理装置、サーバシステム、画像処理システム及びプログラム等を提供すること。
【解決手段】 情報処理装置(第1の処理装置100)は、撮像部(撮像装置10)から撮像画像を取得する撮像画像取得部110と、取得した撮像画像に対して、サーバシステム(第2の処理装置200)における画像処理対象領域に対応する切り出し範囲を設定する切り出し範囲設定部120と、撮像画像のうち、切り出し範囲設定部120により切り出し範囲に設定された領域の画像情報を、ネットワークを介してサーバシステムに送信する通信部140と、を含む。
(もっと読む)
像振れ補正装置及びそれを具備する光学機器、撮像装置、ならびに像振れ補正装置の制御方法
【課題】 小型で機動性が高く、平行振れの高精度な補正を行う防振制御装置を提供する。
【解決手段】 振れによる画像振れを補正する振れ補正手段6806と、振れの角速度を検出する第1振れ検出手段6807pと、記第1振れ検出手段とは異なる方式で振れを検出する第2振れ検出手段101pと、手振れ周波数帯域である第2周波数帯域に含まれ、該第2周波数帯域よりも狭い第1周波数帯域における第1振れ検出手段からの出力に基づく第1信号と第2振れ検出手段からの出力に基づく第2信号とから補正値を演算する演算手段308と、補正値を用いて第1振れ検出手段からの出力を補正する出力補正手段309と、出力補正手段で補正された第1振れ検出手段からの出力に基づいて、振れ補正手段を前記第2周波数帯域において駆動する振れ補正駆動手段6809とを有する。
(もっと読む)
画像合成装置
【課題】撮影中に被写体が移動しても、生成される動きベクトルの重み付けテーブルを被写体の位置に適正に対応させる。
【解決手段】撮影した複数の画像を位置合わせベクトルに従って位置合わせをして合成するための画像合成装置は、撮影時の予め決められた時点から撮影完了までの経過時間を計測し、複数画像の撮影における被写体領域の情報を取得し、撮影した各画像を複数の領域に分割し、各分割領域の動きベクトルを検出し、経過時間および被写体領域の情報を使用して、各画像から検出された動きベクトルの重み付けを行い、重み付けられた動きベクトルを用いて位置合わせベクトルを算出するよう構成されている。
(もっと読む)
撮像装置、プログラム及び撮像装置のブレ補正方法
【課題】大型化や高価格化を招くことなくシフトブレ補正量及び角度ブレ補正量を最適に制御することができる。
【解決手段】撮像光学系及び撮像素子を備え、撮像光学系を通して被写体像を撮像する撮影倍率が変更可能な撮像手段と、装置本体における角速度及び加速度を検出する検出手段と、撮影倍率を導出する撮影倍率導出手段と、検出された角速度及び加速度に基づいて、撮像光学系の光軸を回転させる角度ブレの補正量及び光軸を平行移動させるシフトブレの補正量を、導出された撮影倍率が高くなるほど角度ブレの補正量に対するシフトブレの補正量の割合が高くなるように導出する補正量導出手段と、導出された補正量に基づいて手振れ補正を行う補正手段と、を備えた。
(もっと読む)
画像安定化を使用したローリングシャッターの修正
【課題】画像安定化を使用したローリングシャッターの修正技術を提供する。
【解決手段】ローリングシャッターアーティファクトを修正するための多数の方法、装置及びシステムについて説明する。一実施形態において、画像捕獲システムは、ローリングシャッターアーティファクト(例えば、歪曲)を招くことのあるローリングシャッター画像センサを備えている。このシステムは、画像センサの画像平面におけるピクセル位置と、座標スペースにおける対応光線との間の関係に基づく校正データを利用する自動ローリングシャッター修正メカニズムを遂行するように構成される。このローリングシャッターメカニズムは、校正データに基づいてピクセル速度成分を決定し、そしてそのピクセル速度成分の総計に基づく総計ピクセル速度を画像ごとに推定する。
(もっと読む)
画像処理プログラム、画像処理装置、画像処理方法および画像処理システム
【課題】 位置関係情報の報知を動的に行い、自由度を高める。
【解決手段】 画像処理装置(12)は、オブジェクト(Obi)が配置された仮想空間(IS)を仮想カメラICから撮影した仮想空間画像を出力領域(94)に書き込み(S3)、基準位置(P)とオブジェクトの配置位置(Pi)との位置関係を示すポインタPntの画像を出力領域に記憶された仮想空間画像上に描画する(S43)際、描画しようとするポインタPntの画像を仮想カメラICの高さ(H)やオブジェクトの属性といった条件に応じて変化させる(S29,S31,S41)。
(もっと読む)
デジタル一眼レフカメラ
【課題】カメラブレや被写体ブレによる画質劣化を軽減し、良好な画質の画像を容易に撮影することのできるデジタル一眼レフカメラを提供すること。
【解決手段】カメラシステム1のボディーマイコン12は、検出された被写体の動きに基づいて被写体速度を算出し、被写体速度が所定の閾値A以上か否かを判別し、被写体速度が閾値Aより小さい場合には、交換レンズ2内の交換レンズ用カメラブレ補正装置82、あるいはカメラ本体内のカメラ本体用カメラブレ補正装置75を制御してカメラブレ補正を動作させ、被写体速度が閾値A以上の場合には、デジタル信号ゲイン設定部111のゲインを高くしてISO感度をアップし、シャッター速度を速くして露出時間を短くするとともに、異なる露出条件により複数枚の画像を連続撮影する。
(もっと読む)
撮像装置及びプログラム
【課題】焦点距離に応じて3軸のジャイロセンサの出力結果又は動きベクトルの算出結果の何れかを切り換えて使用し、変更された撮像姿勢を元の撮像姿勢に戻すためのガイド画像を表示する撮像装置及びプログラムを提供する。
【解決手段】撮像姿勢情報算出部102は、焦点距離が所定の値未満の場合は3軸方向の回転の角速度を検出するセンサ部401、402及び403が検出した角速度に基づいて、焦点距離が所定の値以上の場合は動きベクトル算出部101が算出した動きベクトルに基づいて、撮像装置1の撮像姿勢の変位量を撮像姿勢情報として算出する。ガイド情報算出部103は、ユーザが撮像装置1の撮像姿勢を戻すためのガイド情報を算出し、このガイド情報に基づいて生成されたガイド画像が表示部305に表示される。
(もっと読む)
撮影装置および方法、画像再生装置および方法、プログラム、並びに記録媒体
【課題】記録された画像の再生の要否をより自由に決めることができるようにする。
【解決手段】撮影した動画像の画像データを生成する画像データ生成部と、センサから出力される検知信号に基づいて、前記生成された画像データが動画像として再生される場合のタイムラインに対応づけられたセンサ信号を生成するセンサ信号生成部と、前記画像データ、および前記センサ信号をデジタルデータ化したセンサデータを同一の記録媒体に記録する記録部とを備える。
(もっと読む)
61 - 80 / 1,514
[ Back to top ]