
Fターム[5C122HA78]の内容
Fターム[5C122HA78]に分類される特許
101 - 120 / 1,514
撮像装置、撮像方法、集積回路およびプログラム
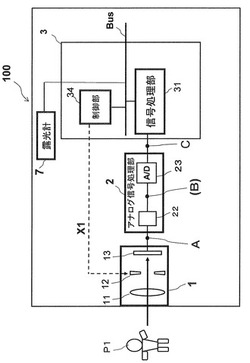
【課題】青空を背景にした逆光の人物の顔を適切な明るさで撮影した場合においても背景の空が飽和しないような高Dレンジの撮影が出来る撮像装置を実現する。
【解決手段】本発明の撮像装置は、撮像部13でハイライトが飽和しないように露光制御を行い、A/D変換部23でデジタルデータに変換した画像信号を、信号処理部31により線形にDレンジ拡大を行なう。Dレンジ拡大された画像信号は、ハイライト領域を重点的に圧縮する特性を有する非線形なDレンジ圧縮によりDレンジ100%まで圧縮される。この構成により、Dレンジ拡大された広いDレンジの画像を無駄なく効率的に圧縮することができる。
(もっと読む)
携帯電子機器

【課題】三次元画像として表示可能な画像の撮影を好適に実行できる携帯電子機器を提供すること。
【解決手段】筐体と、筐体に配置され、被写体を撮影する撮影部と、撮影部と被写体との被写体距離を検出する距離検出部と、撮影部で被写体の1枚目の画像を撮影した後、距離検出部で検出した結果に基づいて、1枚目の画像と組み合わせることで被写体を立体視できる画像を撮影できる被写体距離に筐体が配置されていると判定した場合、撮影部で被写体の2枚目の画像を撮影する制御部と、を有することで上記課題を解決する。
(もっと読む)
画像ぶれ補正装置
【課題】大小広範囲な振幅の振れに対応するとともにレンズ構成の制約が少ない画像ぶれ補正装置を提供する。
【解決手段】撮影レンズ4には、第1補正レンズ11と第2補正レンズ12とを設けてある。各補正レンズ11,12は、光学的補正感度が同じになっている。第1補正レンズ11は、振動の低周波成分の振れ角度に基づいて駆動されるVCM21,22で変位され、第2補正レンズ12は、振動の高周波成分の振れ角度に基づいて駆動されるVCM25,26で変位される。第1補正レンズ11は、第2補正レンズ12に比べてセンタリング速度を速くしてある。
(もっと読む)
撮像装置
【課題】 撮像装置のロール角および/またはピッチ角の大きさに合わせた適切な表示レンジで高精度に、あるいは高い応答性をもって迅速に傾きガイド表示を実現する。
【解決手段】 加速度センサが出力する検出データに基づいて傾き角算出手段により算出したロール角が、(a)のように、0度±5度から±60度の範囲である場合は、ロール角を示す表示スケールB1のように、LCDモニタ5の表示画面の下辺寄りに横向き状態で粗いスケールで表示する。傾き角算出手段により算出されたロール角が(b)のように、0度±5度と水平に近づくと、表示スケールB2のように、ロール角を精度良く目測することができるように、自動的にレンジを拡大させる。算出されたロール角が±60度を越えると表示スケールは、自動的に縦向き状態に切り替わり、縦位置撮影に適する表示となる。
(もっと読む)
撮像装置、撮像制御方法、及びプログラム
【課題】ユーザによる撮像装置の移動速度の傾向に応じた撮像速度で画像を撮像することができる撮像装置を提供する。
【解決手段】CPU7は、パノラマ撮影時にシャッタSWが全押しされると、移動速度格納部24から読み出した、過去直近5回のカメラ移動速度の平均値に基づいて、パノラマ撮影時におけるシャッタスピードを決定する。撮像部2は、ユーザがデジタルカメラ1を動かしている間、上記シャッタスピードで、所定の時間間隔で順次撮像し、所定の位置(合成画像取得位置)に到達する度に撮像画像を合成用画像として取り込み、一部が重複するように合成し、1枚のパノラマ画像を生成する。このとき、CPU7は、撮像画像などを用いてカメラ移動速度を算出し、上記直近5回のパノラマ撮影時に得られたカメラ移動速度の平均値を更新する。
(もっと読む)
通信システム、携帯端末、およびプログラム
【課題】撮像者に煩雑な操作を行わせることなく、撮像した動画を当該撮像者の意図した映像品質で遠隔地の動画表示装置のユーザに視聴させることを可能にする。
【解決手段】動画を撮像し当該動画を表す動画データを出力するカメラを内蔵する携帯端末に、ユーザの体動に伴って生じる当該端末の動きの大きさを検出する動き検出手段を設ける。そして、前記カメラにより撮像した動画を表す動画データを通信網を介して動画表示装置に表示する際には、当該動画データの1フレーム当たりのデータ量と通信網を介して当該動画データを送信する際のフレームレートの少なくとも一方を、動き検出手段により検出された動きの大きさに応じて調整しつつ送信する処理を実行させる。
(もっと読む)
撮像装置
【課題】 スタートシーンのように被写体が急激に動き出すシーンにおいても、被写体に対して焦点調節を追従可能にする。
【解決手段】 撮影レンズの焦点状態を検出する焦点検出手段101と、検出された焦点状態に応じて撮影レンズの焦点調節を行う焦点調節手段107と、焦点検出手段により焦点検出される際の像面位置の変化量である像面変化量が予め設定された閾値未満の場合に焦点調節手段の焦点調節動作を行わせる捕捉判定手段106と、予め決められた条件を満たすことによって被写体および撮像装置が静止状態にある場合に、捕捉判定手段の閾値を予め設定された値よりも大きくする閾値変更手段105とを有する。
(もっと読む)
浮動小数点数のビット長変換回路およびそれを用いた振動補正制御回路
【課題】既存資産との互換性を保ちつつ、アプリケーションに見合う回路規模を実現する。
【解決手段】ビット長削減部11は、浮動小数点数で表現された演算対象値のビット長を削減して演算部15に出力する。ビット長増加部12は、演算部15から入力される浮動小数点数で表現された演算結果値のビット長を増加させて、元のビット長に戻す。ビット長削減部11は、浮動小数点数の指数部の上位側ビットを設定された数、破棄しつつ演算部15により実行されるアプリケーションに応じて、上位側ビットが破棄される指数部に正または負のオフセット値を加算する。ビット長増加部12は、浮動小数点数の指数部からビット長削減部11により破棄されたビットを復元しつつオフセット値を減算する。
(もっと読む)
カメラ
【課題】鞄等からカメラを取り出す動作を検出して省電力待機状態から即座に撮影可能状態に移行させることが可能なカメラを提供すること。
【解決手段】カメラ1が省電力待機状態である際に、接触検出部14によって撮影者の手がカメラ1の本体に接触していることが検出された場合に、加速度検出部12による加速度の検出が行われる。撮影者の手がカメラ1の本体に接触している状態でカメラ1の加速度が第1の所定値以上となったときに、カメラ1の撮影動作に必要な最低限のブロックのみを起動させる緊急モードでカメラ1を起動させる。
(もっと読む)
撮像装置、及びその制御方法、プログラム
【課題】ローリングシャッタ問題による歪みを補正する場合の補正残り、あるいは過補正を低減する。
【解決手段】ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性について、振動に起因して画像に生じる被写体像の歪み量の周波数分布を解析し、当該周波数分布から歪み量が極大となる周波数を、歪み量の中心周波数として決定する。そして少なくとも中心周波数について、振動の時間特性を取得した際に生じた位相ズレがなくなるように、振動の時間特性を補償し、補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
(もっと読む)
撮像装置
【課題】撮影場所の情報を検出して当該撮影場所により発生する収差の影響を適切に除去する撮像装置を提供する。
【解決手段】撮像装置であるカメラシステム(1)は、撮像光学系(SL)を用いて撮影を行う撮像部(撮像素子(9))と、撮像光学系(SL)の収差を補正する収差補正部(収差補正コンバータ(40))と、撮像部により撮影を行う撮影場所に関する情報を検出する撮影場所検出部(カメラ本体CPU(27))と、撮影場所検出部により検出された撮影場所に関する情報に基づいて、収差補正部により撮像光学系(SL)の収差を補正する制御部(カメラ本体CPU(27))と、を有する
(もっと読む)
撮像装置
【課題】撮影場所や撮影条件などにより発生する収差の影響を適切に除去する撮像装置を提供する。
【解決手段】撮像装置であるカメラシステム(1)は、撮像光学系(SL)を用いて撮影を行う撮像部(撮像素子(9))と、撮像光学系(SL)の収差を補正する収差補正部(収差補正コンバータ(40))と、撮像部で撮影された画像に顔に相当する画像が含まれているか否かを判断する顔検出部(33)と、顔検出部(33)により画像に顔に相当する画像が含まれていないと判断したときに、収差補正部により撮像光学系(SL)の収差を補正する制御部(カメラ本体CPU(27))と、を有する。
(もっと読む)
撮像装置、及びその制御方法、プログラム
【課題】ローリングシャッタ問題による歪みを補正する場合の補正残り、あるいは過補正を低減する。
【解決手段】ローリングシャッタ方式で駆動する撮像素子を用いて画像を撮像する場合に、当該撮像素子の露光期間における撮像装置の振動を検出し、検出された振動の時間特性を取得する。振動の時間特性を、振動の周波数について複数の帯域に分離し、振動に起因して画像に生じる被写体像の歪み量の周波数特性を、各帯域について算出し、当該歪み量の周波数特性が極大となる帯域を、歪み量の中心周波数が含まれる帯域として決定する。そして、少なくとも中心周波数が含まれる帯域の1つの周波数について、振動の時間特性を取得する際に生じた位相ズレがなくなるように振動の時間特性を補償する。さらに補償後の振動の時間特性から算出された補正量を用いて、撮像素子のラインごとに振動に起因して生じた被写体像の歪みを補正する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】ユーザの所望する画質を簡単に設定する。
【解決手段】撮像装置1に適用される画像処理装置は、画像取得部41と、入力操作受付部43と、画質処理決定部46と、画質処理情報提示部47と、を備える。画像取得部41は画像のデータを取得する。入力操作受付部43は、画像取得部41により取得された画像のデータに対して、所定の範囲の選択操作を受け付ける。画質処理決定部46は、入力操作受付部43により受け付けられた所定の範囲に基づいて画像取得部41により取得される画像のデータに対して施される画質処理を決定する。画質処理情報提示部47は、画質処理決定部46により決定された画質処理に関する情報を提示する。
(もっと読む)
携帯電子機器、その制御方法及びプログラム
【課題】カメラを備えた携帯電子機器を鏡として使用する場合に、ユーザから視認できない角度の対象物を表示する際の操作性に問題がある。そのため、ユーザに特別な操作を要求することなく、ユーザから視認できない角度の対象物を視認可能とする携帯電子機器が望まれる。
【解決手段】携帯電子機器は、表示部と、画像の撮影が可能なレンズと、加速度センサと、加速度センサの出力に応じて、レンズから取得した画像データを表示部に表示するか、又は、レンズから取得した過去の画像データを表示部に表示するかの切り替えを行う制御部と、を備えている。
(もっと読む)
視軸角制御装置および視軸角制御方法
【課題】視軸角の制御を高速に精度良く行うことを課題とする。
【解決手段】視軸角制御装置10は、撮像装置の視軸角の実測値と該視軸角の実測値に対応するウェッジプリズムのプリズム回転角の実測値とから求められた2元多項近似式を用いて、視軸角を補正する。そして、視軸角制御装置10は、補正された視軸角に対して、近軸領域でのスネルの式を用いて、ウェッジプリズムのプリズム回転角を算出する。続いて、視軸角制御装置10は、算出されたプリズム回転角に応じて、ウェッジプリズムの回転制御を行う。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】ユーザにとって、簡単で手間のかからない操作をするだけで、所望の画像に近い構図で撮像された画像を容易に得ることを可能とすること。
【解決手段】撮像装置1は、構図情報記憶部51と、撮像部16と、構図情報検出部43と、構図情報判定部44と、を備える。構図情報記憶部51は、参照画像の構図を特定するための構図情報を記憶する。撮像部16は、被写体を逐次撮像して撮像画像のデータを出力する。構図情報検出部43は、撮像部16から出力された撮像画像のデータに基づいて、当該撮像画像の構図を特定するための構図情報を検出する。構図情報判定部44は、構図情報記憶部51により記憶された参照画像の構図情報と、構図情報検出部43により検出された撮像画像の構図情報と、の間の合致状態を判定する。
(もっと読む)
撮影装置
【課題】被写体の周囲を一巡して複数回の撮影を行なう場合にスムースに撮影を行ないかつ適切な撮影結果を得るための撮影補助機能を備えた撮影装置を提供することである。
【解決手段】被写体像を光電変換して画像データを取得する撮像部12と、画像,情報を表示する表示部18と、当該撮影装置1が向いている方位を判定する方位判定部13dと、撮像部を連続的に動作させた時の方位判定部による判定結果を表示部に表示する表示制御部11cと、を具備し、表示制御部は、方位判定部による判定結果を表示する際には、未撮影方位を識別可能に表わす円周表示を表示部に表示させる。
(もっと読む)
画像表示装置、及び画像表示方法、画像表示プログラム
【課題】複数の撮影画像の中から所望の撮影画像を検索する際の作業効率や利便性を向上させる。
【解決手段】
DSP/CPU5は、GPSブロック8により取得した現在位置を検索用位置データとして設定し、方位センサ16により取得した現在方向(カメラ本体が向けられている方向)を検索用方向データとして設定する。現在位置を中心として現在方向の所定角度範囲内を検索対象とし、メモリーカード15に記録されている複数の画像データの中から、属性情報として付加されている撮影位置が検索対象の範囲に含まれる全ての画像データを表示候補として抽出する。抽出した画像データを、キー入力部7のズームキーの操作に応じ、現在位置から撮影位置までの距離に従った順序で切り替える。現在位置又は現在方向の変化に伴い検索対象が変化するため、新たな表示候補の絞り込み作業を、カメラ本体の移動操作や回転操作のみによって行うことができる。
(もっと読む)
複合高域遮断フィルタ、およびそれを用いた撮像装置
【課題】手振れ補正光学系を有する撮像装置において、手振れ補正部材による手振れ補正帯域の高周波側での位相遅れによる影響を排除し、手振れ角の検出精度を向上し、手振れ補正性能を向上する。
【解決手段】撮像装置において、複合高域遮断フィルタ105は、第一の高域遮断フィルタ105aと、第二の高域遮断フィルタ105bと、加減算器108とを備える。第二の高域遮断フィルタ105bは、第一の高域遮断フィルタ105aの出力を入力とする。加減算器108は、複合高域遮断フィルタ105の入力から、第二の高域遮断フィルタ105bの出力を減算し、その減算結果を第一の高域遮断フィルタ105aに出力する。第一の高域遮断フィルタ105aの出力が、複合高域遮断フィルタ105の出力として出力される。
(もっと読む)
101 - 120 / 1,514
[ Back to top ]