
Fターム[5F031MA03]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 処理装置 (13,378) | 複数の処理部を集積した装置(モジュール) (1,217) | 水平方向に集積 (951)
Fターム[5F031MA03]の下位に属するFターム
放射状配置 (386)
Fターム[5F031MA03]に分類される特許
201 - 220 / 565
インライン成膜処理装置

【課題】成膜処理のタクト時間を長くすることなく、加熱工程での消費電力を低減する。
【解決手段】インライン成膜処理装置において、生産停止中に成膜処理室に設けたシースヒータを用いて全カートを高温に保持することによって、生産開始に移行した際のランプヒータを用いて行う加熱工程での消費電力を低減する。消費電力が少ないシースヒータによって全カートを高温に保持することによって、消費電力が大きなランプヒータによる加熱を低減し、加熱室での加熱工程による消費電力を低減する。全カートが高温に保持されているため、加熱室における加熱工程で行う昇温幅を従来よりも小さくすることができ、これによってタクト時間を短縮することができる。
(もっと読む)
基板処理システム

【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理システム1には、複数の処理装置を鉛直方向に多段に積層し、かつ水平方向に直列に配置した第1のブロックG1と第2のブロックG2が配置されている。第1のブロックG1と第2のブロックG2との間には、搬送領域Rが設けられている。搬送領域Rには、ウェハを搬送するメイン搬送装置130、131が配置されている。メイン搬送装置130、131は、ウェハを保持する複数の搬送アームと、複数の搬送アームを鉛直方向に並べて支持する支持部と、各搬送アームを水平方向に独立して移動させ、かつ支持部を中心として各搬送アームを独立して回転させるアーム移動機構と、支持部を第1のブロックG1と第2のブロックG2に沿って鉛直方向及び水平方向に移動させる支持部移動機構と、を有している。
(もっと読む)
リソグラフィー装置、及びそれを用いたデバイスの製造方法
【課題】FOUPを使用するリソグラフィー装置において、フットプリントの大型化を抑え、かつ、装置内部自体のスペースが大きくなることも抑えたリソグラフィー装置を提供する。
【解決手段】基板7にパターンを形成するために用いられるリソグラフィー装置であって、基板7を収納した密閉型容器40を、装置外部から装置内部へ搬送する容器搬送手段60、61と、装置内部に設けられ、密閉型容器40の前扉40aを開閉するオープナ62と、密閉型容器40に収納された基板7を処理部へ搬送する基板搬送手段と、を備え、容器搬送手段60、61は、密閉型容器40を装置外部から装置内部へ搬送する際、装置内部に収容されるように伸縮可能であることを特徴とする。
(もっと読む)
リソグラフィマシン及び基板処理構成体
複数の荷電粒子リソグラフィ装置を具備する構成体であって、各荷電粒子リソグラフィ装置は、真空チャンバ(400)を有する。この構成体は、複数のリソグラフィ装置にウェーハを運搬するための共通のロボット(305)と、夫々の真空チャンバ(400)の前面に配置された、各荷電粒子リソグラフィ装置のためのウェーハロードユニット(303)とをさらに具備する。複数のリソグラフィ装置は、これらリソグラフィ装置の前面が、各装置にウェーハを運搬するための共通のロボット(305)の通路を収容している通路(310)を面している状態で、列をなして配置され、各リソグラフィ装置の後面は、アクセス通路(306)に面し、各真空チャンバの後壁には、夫々のリソグラフィ装置へのアクセスのためのアクセスドアが設けられている。 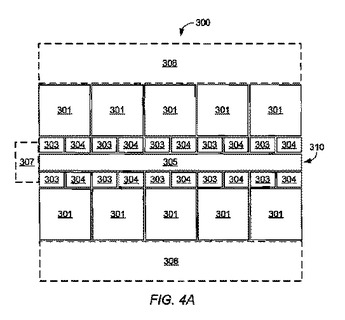 (もっと読む)
(もっと読む)
位置合わせ機構、加工装置および位置合わせ方法
【課題】反りを含む半導体ウェーハを破損させることなく、チャックテーブルに精度よく位置合わせすることができる位置合わせ機構、加工装置および位置合わせ方法を提供すること。
【解決手段】半導体ウェーハの外径よりも大径に形成され、半導体ウェーハの少なくとも外周縁部を吸着する吸着面25を有する仮置きテーブル23と、吸着面25に吸着された半導体ウェーハの外周縁部を撮像する撮像機構24と、半導体ウェーハの外周縁部の画像データに基づいて、半導体ウェーハの中心の位置データを算出する制御部と、半導体ウェーハの中心の位置データに基づいて、半導体ウェーハが保持されるチャックテーブル52の保持面56の中心に対し半導体ウェーハの中心を位置合わせした状態で、半導体ウェーハを保持面56に載置するウェーハ供給部17とを備えた。
(もっと読む)
研削装置
【課題】研削加工後の被加工物を吸引保持して洗浄手段に搬送した後に、被加工物を吸引保持パッドから剥離する際に吸引保持パッドに吸引されている研削水が周囲に飛散しないようにした搬出手段を備えた研削装置研削装置を提供する。
【解決手段】被加工物を吸引保持するチャックテーブルと、該チャックテーブル上に吸引保持された被加工物を研削する研削手段と、チャックテーブル上で研削された加工後の被加工物を洗浄する洗浄手段と、チャックテーブル上で研削された被加工物を洗浄手段に搬出する被加工物搬出手段とを具備する研削装置であって、被加工物搬出手段は下面に被加工物を吸引保持する吸着面を有する吸引保持パッドと、吸引保持パッドを一端部に支持する搬送アームと、搬送アームの一端部に吸引保持パッドを懸垂状態で弾性支持する支持手段と、搬送アームの一端部に装着され吸引保持パッドの外周を覆う遮蔽部材とを具備している。
(もっと読む)
基板処理装置、基板処理方法および半導体装置の製造方法
【課題】リードタイムを短縮しスループットを高める。
【解決手段】基板処理装置において、垂直方向に複数段設置されたウエハローディングポート13と、ウエハローディングポート13に載置されたポッド10のキャップを開閉する際にキャップを水平方向に個別に移動させる、ウエハローディングポート13それぞれに設けられたポッドオープナ20と、少なくともウエハローディングポート13夫々に載置されたポッド10に収納された複数枚のウエハ9を支持するボート8と、ウエハローディングポート13とボート8との間で複数枚のウエハ9を搬送するウエハ移載装置15と、を備える。
(もっと読む)
基板処理システム
【課題】1層に対する複数回パターニングを高効率で行うことが可能な基板処理システムを提供すること。
【解決手段】キャリアブロックS1と、そこから一枚ずつ搬入された基板に対し1回目の塗布処理を行う第1塗布処理部31、1回目の現像処理を行う第1現像処理部41、2回目の塗布処理を行う第2塗布処理部32、2回目の現像処理を行う第2現像処理部42を有する処理ブロックS2と、露光装置との間で基板を受け渡すインターフェイスブロックS3と、これらの間で基板を搬送する基板搬送機構とを具備し、一つの基板に対して少なくとも2回の露光を行う露光装置に対応可能であり、第2現像処理部42の上に第1塗布処理部31が積層されてなる第1積層体と、第1現像処理部41の上に第2塗布処理部32が積層されてなる第2積層体とが並置されている。
(もっと読む)
位置測定装置、成膜方法並びに成膜プログラム及び成膜装置
【課題】一方向からの測定によって対象物の位置情報を精度よく取得することを課題とする。
【解決手段】成膜装置1000が有する位置測定装置1100は、基板400が有する測定対象平面400a上の3つの測定点400a1、400a2、400a3に対し、測定点までの水平方向の距離をそれぞれ測定する測距部を備える。測距部は、3つの変位センサ1110、1120、1130を有する。これらの変位センサ1110、1120、1130は、垂直仮想平面600に正対するように配置される。位置測定装置1100は、水平方向から基板400の測定対象平面400aの投影画像を撮像する撮像部を備えている。撮像部は、画像センサ1150と、この画像センサ1150が接続された画像取得部1160を備えている。
(もっと読む)
チャンバ及び成膜装置
【課題】積層膜の層構成や処理プロセス構成の変更に対応できるチャンバ、これを複数接続した成膜装置を提供する。
【解決手段】チャンバ100は、上下が開口され、基板の処理空間213を区画する容器本体110と、容器本体110の下部開口部を着脱可能に密閉する底部材111と、容器本体110の上部開口部を着脱可能に密閉する蓋部材112と、からなり、排気系201に接続される排気口114が設けられた底部材111を備えると共に、基板の処理機能を有するプロセスモジュール120が搭載された蓋部材112を備え、容器本体110を共通として、底部材111及び蓋部材112が交換可能である。
(もっと読む)
基板搬送ロボットおよび基板搬送装置
【課題】必要十分な動作範囲を確保しつつ省フットプリント、クリーンで、高いスループットを備える基板搬送ロボットを提供する。
【解決手段】基板を保持するハンド13と、ハンド13を先端に支持するアーム部24と、アーム部24を支持するボディ16と、からなる第1及び第2のロボット部25a、25bと、第1のロボット部25aを支持する第1の走行ベース15aと、第2のロボット部25bを支持する第2の走行ベース15bと、第1の走行ベース15aと第2の走行ベース15bとを支持する共通ベース18と、を備え、第1のロボット部25aと第2のロボット部25bが、第1および前記第2の走行ベースによって各々自在に走行可能とした。
(もっと読む)
基板処理装置
【課題】実際に基板を処理させる処理部の数が変動しても、複数種類の処理を所定の順番どおりに効率よく基板に行うことができる基板処理装置を提供する。
【解決手段】レジスト膜用塗布処理ユニットRESIST、加熱冷却ユニットPHP、冷却ユニットCPの順番で基板Wを搬送し、複数種類の処理を基板Wに行う。たとえば、レジスト膜用塗布処理ユニットRESIST、加熱冷却ユニットPHPおよび冷却ユニットCPをそれぞれ3台、2台、1台使用しているところ、1台の加熱冷却ユニットPHPを使用処理部から外れた場合であっても、残っている使用処理部によって、所定の順番で基板Wに処理を行うことができる。
(もっと読む)
真空処理装置
【課題】複数のウエハーを搬送し、真空処理するための手段を提供する。
【解決手段】本発明の真空処理装置によれば、複数の指156を有するハンド部155を搬入用真空槽112a内に設けておき、大気雰囲気中で各指156上に複数の基板31を両端をはみ出した状態で配置し、搬入用真空槽112a内を真空排気し、処理用真空槽113と接続してハンド部155を処理用真空槽内に移動させる。処理用真空槽113内には複数の横棒162を有する昇降機構161を設けておき、横棒162を上方に移動させ、一本の指上の基板の両端を二本の横棒に載せて降下させ、載置台165に載せて真空処理を行う。ピンやトレイを使用せずに搬出入できる。
(もっと読む)
基板処理装置
搬送装置の駆動システムは、搬送装置に接続されている複数の永久マグネット、複数の永久マグネットの少なくとも1つの磁界に曝されている複数の固定巻線、固定巻線に電圧を加えて搬送装置に磁力をもたらす制御システム、及び搬送装置の浮揚、ピッチ及びロールの受動的安定化を提供するための搬送装置の少なくとも一側部に近接している強磁性コンポーネントの配列を含んでいる。 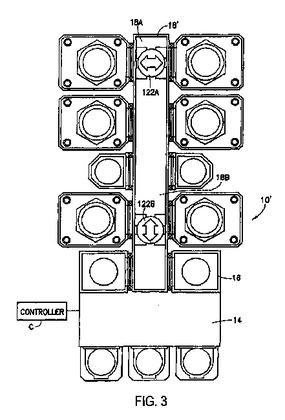 (もっと読む)
(もっと読む)
基板処理装置、フラットパネルディスプレイの製造装置およびフラットパネルディスプレイ
【課題】検査ステージを省略することにより、装置構成のコンパクト化および生産性の向上を図ることを目的とする。
【解決手段】各処理ステージ20で処理を行った後に次の処理ステージ20に向けてパネル基板1をピッチ送りする可動レール32と、処理ステージ20内または前後の処理ステージ20間に設けられ、パネル基板1を撮影するためにパネル基板1の送り方向と直交する方向に受光素子を配列したラインセンサカメラ41と、パネル基板1の移動速度を検出するエンコーダ検出センサ61と、ラインセンサカメラ41が取得した映像信号によりフレーム画像を生成する画像処理装置43と、を備え、エンコーダ検出センサ61が検出する移動速度に基づいて映像信号の間隔が等間隔となるように補正を行ってフレーム画像を生成している。
(もっと読む)
フロントエンド拡張部及び内部基板バッファを備えた基板搬送装置を有する基板処理装置
【課題】基板搬送装置チャンバ(31)に連結される複数の基板処理モジュール(14)を有する基板処理装置(10)を提供すること。
【解決手段】基板搬送チャンバ(31)は、ハウジング(13)と基板搬送機構(22)とを有する。ハウジング(13)は、基板処理モジュール(14)のためのメイン搬送チャンバへの出入り口を有する実質的に閉じたメイン搬送チャンバ(31)を形成する。搬送機構(22)は基板保持体(29)を有し、基板保持体は可動に該搬送チャンバ(31)に設けられる。ハウジング(13)はフロントエンド拡張部(30)を有し、フロントエンド拡張部は装填ロック(16)に連結される。フロントエンド(28)の拡張部(30)は、整列器(32)と、冷却器(36)と、バッファ(34)とを有し、バッファはハウジング(13)に直接連結され且つメイン搬送チャンバ(31)の一部であるフロントエンド拡張部(30)内に位置する。
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 複数枚の基板を保持するロードロック室と、ロードロック室内に連通可能な第1搬送室と、第1搬送室内に連通可能で基板を処理する第1処理室と、第1搬送室内に連通可能な中継室と、中継室内に連通可能な第2搬送室と、第2搬送室内に連通可能で基板を処理する第2処理室と、ロードロック室、第1処理室、中継室間での基板の搬送を行う第1搬送ロボットと、中継室、第2処理室間での基板の搬送を行う第2搬送ロボットと、第1搬送ロボットによる第1処理室内外への基板の搬送時間帯が、第2搬送ロボットによる第2処理室内外への基板の搬送時間帯と少しでも重なり合うように、第1搬送ロボット及び第2搬送ロボットを制御する制御部と、を備える。
(もっと読む)
被処理体の処理装置
【課題】処理容器内にて被処理体を回転させながら処理する処理装置を提供する。
【解決手段】基板処理装置10は、処理源155を用いて内部にて基板Gを処理する処理容器100と、処理容器100の壁部に配設され、基板Gを処理容器内に搬入又は処理容器内から搬出する複数のバルブVと、処理容器100の底面に対して鉛直方向の中心軸Oを中心に点対称に配置され、処理容器内にて中心軸Oを中心に回転可能な複数のステージ110a,110bと、複数のステージ110a,110bを支持し、複数のステージ110a,110bのうちのいずれかのステージを複数のバルブのうちのいずれかの搬送口近傍まで回転させるタイミングに併せて、複数のステージ110a,110bのうちの他のいずれかのステージを複数のバルブVのうちの他のいずれかのバルブVの近傍まで回転させるステージ支持部材115と、を有する。
(もっと読む)
基板処理装置
【課題】ゲートバルブの適切なメンテナンス時期や原因を予測することができ、もって、装置の効率的な運用を行うことができる基板処理装置を提供する。
【解決手段】基板に処理を施すプロセスチャンバPM1,PM2と、該プロセスチャンバへ基板を搬送する真空ロボットハンドラTH1,TH2を備えたバキュームロックチャンバVL1,VL2と、該チャンバに連接され、ロードポートLP1,LP2に収納された処理待ちの基板が待機する大気ローダLPとを備えた基板処理装置において、上位コントローラにより、真空ロボットハンドラを制御して、チャンバとプロセスチャンバとの間で基板の搬送を行う一方、プログラマブルコントローラによりチャンバとプロセスチャンバとの間を仕切るゲートバルブPGV1,PGV2を管理し、その動作履歴データを作成し、上位コントローラが動作履歴データを操作部の操作画面に表示する。
(もっと読む)
ロードロック装置および真空処理システム
【課題】 多段の真空予備室を有するロードロック装置において、隔壁の変形に起因するパーティクルの発生を防止する。
【解決手段】 ロードロック装置5は、隔壁47によって隔てられた上下2段の真空予備室27a,27bを有している。隔壁47には、上下に貫通する一対のスリット101、102が形成されている。スリット101の内部は空洞で、スリット101の上下の開口部分は、弾性板61によって封止されている。スリット101内には、スリット101の幅方向に加わる圧縮力に抗するように補強部材71が配備されている。隔壁47には、スリット101,102の内部からシール面47a,47bにそれぞれ達する圧力調整孔50が設けられている。
(もっと読む)
201 - 220 / 565
[ Back to top ]