
Fターム[5F046CC16]の内容
半導体の露光(電子、イオン線露光を除く) (57,085) | ステージ、チャック機構、及びそれらの動作 (6,599) | レーザ測長計を用いるもの (470)
Fターム[5F046CC16]に分類される特許
21 - 40 / 470
変位測定装置、ステージ装置、露光装置、スケール製造方法、及びデバイス製造方法
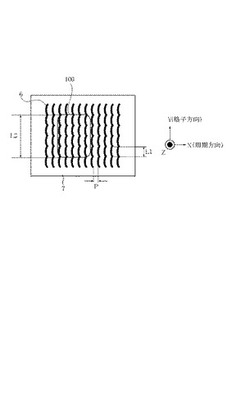
【課題】 物体の変位量を高精度に測定可能な変位測定装置を提供すること。
【解決手段】 本発明の一側面としての変位測定装置は、格子パターン6が形成されたスケール7と、スケール7に光を照射する光源と、スケール7の格子パターン6で回折された光を受光する受光素子と、を備える。格子パターン6の形状は、その格子パターン6の格子方向Yに一定の周期で変化している。受光素子は、格子パターン6上の、格子方向Yにその周期の自然数倍の長さを有する領域100で回折された光を受光する。
(もっと読む)
干渉計システム、ステージ装置及び露光装置

【課題】検出結果の誤差を低減することが可能な干渉計システム、ステージ装置及び露光装置を提供すること。
【解決手段】移動体の位置情報を検出する干渉計システムであって、光を射出する光源と、光を分光して射出する分光装置と、移動体に設けられ、分光された光を反射させる移動鏡と、移動鏡を介した光を受光する受光装置と、光が分光装置から射出され移動鏡に入射し当該移動鏡で反射された後に分光装置へ向かう所定の光路を形成する第1光学系と、当該光路を進行した光が分光装置に入射せずに当該光路の進行方向とは逆向きに当該光路を進行するように光を導光する第2光学系と、第2光学系を進行する光のうち所定成分を前記受光装置に入射させ、所定成分以外の成分を光路に入射させないように当該光を分光する第2分光装置とを備える。
(もっと読む)
計測装置、ステージ装置及び露光装置
【課題】計測能力を向上すること。
【解決手段】所定の移動面内を移動する移動体の移動情報を検出する計測装置であって、ピッチが互いに等しくなるように配置された格子をそれぞれ有し、当該格子の位相が互いにずれるように移動体に設けられた複数の回折格子と、光源からの光を複数の回折格子のそれぞれに向けて射出すると共に、複数の回折格子のそれぞれにおいて得られた回折光を個別に干渉させる光学系と、光学系を介して得られた干渉光を検出し、検出結果に基づいて移動情報を検出する検出装置とを備える。
(もっと読む)
直交度の計測方法
【課題】2つのミラーの間の直交度を迅速かつ高い精度で計測する。
【解決手段】第1ミラー541および第2ミラー540を有する物品における前記第1ミラー541の反射面と前記第2ミラー540の反射面との直交度を計測する計測方法に係り、前記計測方法は、前記第2ミラー540の反射面に対して直角にレーザ光LB1が入射するように前記レーザ光LB1の光軸を調整する調整ステップと、前記第1ミラー541の反射面に平行な方向に前記物品を既知の距離だけ移動させたときの、前記レーザ光LB1が入射するように前記第2ミラー540の反射面に配置されたコーナーキューブCC1によって反射された前記レーザ光LB1の光軸の変位量を検出する検出ステップと、前記距離と前記変位量とに基づいて前記第1ミラー541の反射面と前記第2ミラー540の反射面との間の角度が直角からずれている量を計算する計算ステップとを含む。
(もっと読む)
シャフトモータ及びステージ装置並びに露光装置
【課題】装置の大型化及び高価格化を防止できるシャフトモータを提供する。
【解決手段】軸体60と筒体70との一方に発磁体61が設けられ、軸体と筒体との他方にコイル体CLが設けられる。軸体の軸線位置と、筒体の軸線位置とを同軸となるように調整する位置調整装置CD、CONTを有する。
(もっと読む)
露光装置、露光方法、及びデバイス製造方法
【課題】焦点位置検出系などを必ずしも設けることなく、デフォーカスの殆どない基板上へのパターンの転写を実現することが可能な露光装置を提供する。
【解決手段】水圧パッドと水圧パッドとによって、ウエハ及び該ウエハが載置されたテーブルが狭持されている。水圧パッドによって、その軸受面とウエハとの投影光学系の光軸方向に関する間隔が、所定寸法に維持される。また、水圧パッドは、気体静圧軸受とは異なり、軸受面と支持対象物(基板)との間の非圧縮性流体(液体)の静圧を利用するので、軸受の剛性が高く、軸受面と基板との間隔が、安定してかつ一定に保たれる。また、液体(例えば純水)は気体(例えば空気)に比べて、粘性が高く、液体は振動減衰性が気体に比べて良好である。従って、焦点位置検出系などを必ずしも設けることなく、デフォーカスの殆どないウエハ(基板)上へのパターンの転写が実現される。
(もっと読む)
露光装置及びデバイス製造方法
【課題】マスクとプレートとの間の高精度な位置合わせが可能な露光装置を提供する。
【解決手段】マスクの上に配置されたマスクマークとプレートの上に配置されたプレートマークとの間の位置合わせを行う露光装置であって、マスクマーク及びプレートマークを同時に計測して画像を取得する画像計測装置と、画像計測装置により取得された画像からマスクマークとプレートマークとの間の相対的な位置誤差を算出する位置誤差演算装置と、画像計測装置による画像取得期間中に、マスクを搭載したマスクステージ又はプレートを搭載したプレートステージの駆動目標位置に対する位置偏差を計測する偏差計測装置と、偏差計測装置により得られたマスクステージ又はプレートステージの位置偏差と、位置誤差演算装置により得られた位置誤差とを用いて、マスクマークとプレートマークとの間の位置合わせを行うための補正量を算出する補正量演算装置とを有する。
(もっと読む)
露光装置、露光方法、及びデバイス製造方法
【課題】焦点位置検出系などを必ずしも設けることなく、デフォーカスの殆どない基板上へのパターンの転写を実現することが可能な露光装置を提供する。
【解決手段】水圧パッドと水圧パッドとによって、ウエハ及び該ウエハが載置されたテーブルが狭持されている。水圧パッドによって、その軸受面とウエハとの投影光学系の光軸方向に関する間隔が、所定寸法に維持される。また、水圧パッドは、気体静圧軸受とは異なり、軸受面と支持対象物(基板)との間の非圧縮性流体(液体)の静圧を利用するので、軸受の剛性が高く、軸受面と基板との間隔が、安定してかつ一定に保たれる。また、液体(例えば純水)は気体(例えば空気)に比べて、粘性が高く、液体は振動減衰性が気体に比べて良好である。従って、焦点位置検出系などを必ずしも設けることなく、デフォーカスの殆どないウエハ(基板)上へのパターンの転写が実現される。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】代替のエンコーダタイプの位置測定システムを提供する。
【解決手段】他のオブジェクトに対する可動オブジェクトの位置を測定する位置測定システムが、可動オブジェクト及び他のオブジェクトのうちの一方に取り付けられ、それぞれが測定方向に沿って測定ビームを放出することができる2つ以上の一次元(1D)エンコーダヘッドと、可動オブジェクト及び他のオブジェクトのうちの他方に取り付けられ、それぞれの基準ターゲットが2つ以上の一次元(1D)エンコーダヘッドと協働するグリッド又は回折格子を有する平面を含む1つ又は複数の基準ターゲットと、2つ以上の1Dエンコーダヘッドの出力に基づいてオブジェクトの位置を計算するプロセッサとを含み、2つ以上の1Dエンコーダヘッドそれぞれの測定方向は、それぞれの基準ターゲットの平面に対して非垂直である。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】基板に形成された下地パターンの上に新たなパターンを露光する際、下地パターンの位置ずれ量が基板内で場所によって異なっても、新たなパターンを基板全体に渡って下地パターンに合わせて露光する。
【解決手段】下地パターンの基板1内での位置を、基板1全体に渡って検出し、検出した下地パターンの基板1内での位置に応じて、光ビーム照射装置20の駆動回路へ供給する描画データを作成する。基板1をチャックに搭載し、チャック10と、光ビームを変調する空間的光変調器、描画データに基づいて空間的光変調器を駆動する駆動回路、及び空間的光変調器により変調された光ビームを照射する照射光学系を有する光ビーム照射装置20とを、相対的に移動し、光ビーム照射装置20からの光ビームにより基板1を走査して、基板1にパターンを描画する。
(もっと読む)
露光装置及び露光方法、並びにそれを用いたデバイスの製造方法
【課題】ウエハステージの駆動方向によって発生する微小振動を適切に処理し、1つのウエハ内の露光精度を均一に保つ露光装置及び露光方法を提供する。
【解決手段】原版を保持する原版ステージと、基板を保持、及び移動可能とする基板ステージと、原版のパターンを基板に投影する投影光学系と、基板ステージの位置を計測する位置計測手段と、該位置計測手段の計測値に基づいて、基板ステージの駆動を制御する制御手段と、を有し、ステップ・アンド・リピート方式によって原版のパターンを基板に露光する露光装置であって、制御手段は、基板ステージが、基板を位置決めするために露光位置に向けて駆動する際、予め測定した、基板ステージの駆動方向による、目標位置、倍率、若しくは回転のうち、少なくとも1つのずれ量に基づいて、基板ステージの駆動位置の補正を実施する(S103〜S107)。
(もっと読む)
露光装置及びデバイス製造方法
【課題】ウエハを保持するステージを高精度で駆動する。
【解決手段】 微動ステージWFS1と微動ステージWFS1を支持する粗動ステージWCS1とにより囲まれる空間内に位置決めされる計測アーム71Aがエンコーダヘッドを有し、該ヘッドにより微動ステージWFS1に設けられたグレーティングRGに計測ビームを照射し、グレーティングRGからの戻りビームを受光する。ヘッドの出力に基づいて、微動ステージ位置計測系が微動ステージWFS1の位置情報を計測する。計測アーム位置計測系72A0が、計測アーム71Aの光軸AXに対する相対位置情報を計測する。従って、微動ステージ位置計測系と計測アーム位置計測系72A0との計測結果に基づいて、光軸AXを基準とする微動ステージWFS1の位置情報を高精度で計測する。
(もっと読む)
波長検出装置、圧力検出装置、除振装置、および露光装置
【課題】波長変化の検出精度を向上させる波長検出装置、圧力検出装置、除振装置、および露光装置を提供する。
【解決手段】前記光源部から射出される光を複数の光に分離し、当該分離した複数の光のうち少なくとも2つの光を干渉させる光学部と、前記干渉によって得られた干渉光を受光する受光部と、前記受光部によって受光された干渉光の干渉強度を検出する検出部とを備え、前記光学部は、前記干渉させる2つの光のうちいずれか一方の光を測定対象となる媒質に透過させる測定媒質部を備える。
(もっと読む)
計測装置、露光装置およびデバイス製造方法
【課題】エンコーダシステムを用いたステージを位置決めする場合、スケール間に存在する幾何学的誤差に起因する計測誤差を低減する。
【解決手段】可動体に配置された複数のセンサと、構造体に取り付けられた複数のスケールとを有し、前記可動体の変位を検出することによって前記可動体の位置を計測する計測装置であって、前記複数のスケールは、第1方向における前記可動体の変位を検出するための2つの第1スケールと、前記第1方向とは異なる第2方向における前記可動体の変位を検出するための2つの第2スケールとを含み、2つのセンサによる検出値とが等しくなるように前記可動体を前記第1位置から前記第2位置に移動させたときに前記2つの第1スケールに対向している2つのセンサによってそれぞれ検出される変位の間の差に基づいて、前記2つの第1スケールの間に存在する幾何学的誤差に起因する計測誤差を低減する制御部とを備える。
(もっと読む)
スケール体、位置検出装置、ステージ装置、及び露光装置
【課題】スケール用のパターンが形成されたパターン形成面の法線方向の位置情報を高精度に計測する。
【解決手段】スケール体28eは、Yスケール39Y2が形成されたパターン板4eと、パターン板4eに設けられ、Yスケール39Y2を覆うカバーガラス5と、カバーガラス5の表面に形成され、互いに異なる波長域の第1の光及び第2の光に対して波長選択性を有する波長選択膜7と、を備え、波長選択膜7を介してカバーガラス5を透過する第1の光の透過率は、カバーガラス5のみを透過する第1の光の透過率より低く、波長選択膜7を介してカバーガラス5を透過する第2の光の透過率は、波長選択膜7で反射する第2の光の反射率より高い。
(もっと読む)
物体処理装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】基板の対する処理を高精度で行う。
【解決手段】 基板Pの下方には、基板Pの下面にエアを噴出する複数のエア浮上ユニット50が配置され、基板Pは、概ね水平となるように非接触支持される。また、基板Pは、定点ステージ40により被露光部位が下方から非接触保持され、その被露光部位の面位置がピンポイントで調整される。従って、基板Pに高精度で露光を行うことができ、かつ基板ステージ装置PSTの構成を簡単にすることができる。
(もっと読む)
物体移動装置、物体処理装置、露光装置、物体検査装置及びデバイス製造方法
【課題】基板を所定の二次元平面に沿って高速、且つ高精度で案内する。
【解決手段】基板Pは、枠状に形成された軽量な基板保持枠60により吸着保持され、基板保持枠60は、リニアモータを含む駆動ユニット70により水平面に沿って駆動される。基板保持枠60の下方には、基板Pの下面にエアを噴出して、その基板Pが概ね水平となるように非接触浮上支持する複数のエア浮上ユニット50が配置されている。複数のエア浮上ユニット50は、基板保持枠60の移動範囲をカバーしているので、駆動ユニット70は、高速且つ高精度で基板保持枠60(基板P)を水平面に沿って案内できる。
(もっと読む)
平面モータ
【課題】スライダをプラテンから降ろすことなくスライダのエアベアリング面を直接メンテナンスできる平面モータを提供する。
【解決手段】
エアベアリング19によりスライダ12をプラテン11上に浮上させ、2次元方向に移動させる平面モータにおいて、
プラテン11にエアベアリング19に影響しない程度の大きさで設けられたメンテナンス穴11aと、
このメンテナンス穴11aを通してスライダ12のエアベアリング面12aの清掃を行うメンテナンス部18と、
を備えたことを特徴とする平面モータ。
(もっと読む)
位置決め装置およびこれに着脱可能な光学アダプター
【課題】アッベ誤差を解消できる位置決め装置を提供する。
【解決手段】スライダに搭載されたレーザ干渉計と、固定ミラーとを備え、前記レーザ干渉計と前記固定ミラーとの間で往復するレーザ光を用いてレーザ干渉に基づく測長を行うことで前記スライダを位置決めする位置決め装置である。前記レーザ干渉計から得られた直線偏光のレーザ光を折り曲げることで、そのレーザ光の光路を変更させるミラーと、前記ミラーを経由した前記レーザ光を円偏光のレーザ光に変換して前記固定ミラーに照射するλ/4板と、を備える。
(もっと読む)
荷電粒子ビーム描画装置、荷電粒子ビーム描画方法および振動成分抽出方法
【課題】ステージ位置を正確に測定して高い描画位置精度が得られる荷電粒子ビーム描画装置および荷電粒子ビーム描画方法を提供する。
【解決手段】S101では、第1のステージ位置測定手段による位置信号が得られ、この信号はS103で周波数解析される。また、S102では、第2のステージ位置測定手段による位置信号が得られ、この信号はS104で周波数解析される。次いで、S105において、S103とS104の結果が比較され、第1の位置測定手段に由来する振動成分が特定される。そして、S106において、S105で特定した振動成分に対して逆位相となる信号を生成する。その後、S107において、S101で得られた位置信号にS105で生成した信号を足し合わせる。補正信号は、サーボ制御部や偏向制御部に送られて、ステージ位置や電子ビーム位置が制御される。
(もっと読む)
21 - 40 / 470
[ Back to top ]