
Fターム[5H004GA03]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 過渡特性改善 (246) | 減衰性向上(オーバーシュート防止) (57)
Fターム[5H004GA03]に分類される特許
1 - 20 / 57
アクチュエータの制御方法及びアクチュエータの制御装置
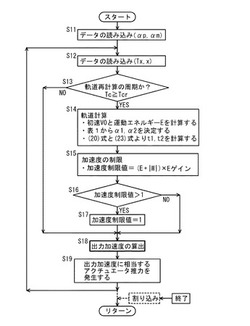
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
制御装置および方法

【課題】瞬間総エネルギーが一定値を超えないように、かつ温度のオーバーシュートの発生を抑制できる確率が高くなるようにする。
【解決手段】制御装置は、各制御ループLiの昇温電力量PWiを予測する昇温電力量予測部3と、昇温電力量PWiが大きい方から小さい方への順序を各制御ループLiの昇温実行順序として決定する昇温実行順序決定部4と、最初の昇温開始のとき、あるいは昇温対象の制御ループの昇温が進むことにより操作量が下降して電力余裕が生じたと判断されるときに、昇温実行順序に従って昇温対象の制御ループを選択する昇温対象選択部5と、各制御ループLiのヒータに供給する電力の制限操作を行なう電力制限操作部6と、制御ループLi毎に設けられた制御部7−iとから構成される。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて制御対象の安定した制御を実現すると共に、目標値の推移を操作員によって容易に設定する。
【解決手段】制御装置128は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部140と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部142と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部144とを備え、第1伝達関数は、ユーザによる操作入力に応じて設定された複数の目標点に基づき、隣接する目標点同士を結線して形成される。
(もっと読む)
制御装置
【課題】設定値に応じた適切な目標値と適切なゲイン補正とを通じて、制御対象の安定した制御を実行する。
【解決手段】制御装置126は、所望する設定値に所定の第1伝達関数を施して目標値を生成する目標値生成部130と、目標値から実測値を減算した偏差に所定の第2伝達関数を施して操作量を導出するフィードバック制御機能部132と、偏差に基づくゲイン補正係数を、フィードバック制御機能部の操作量に乗算するゲイン補正機能部134とを備える。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
フィードバック制御装置
【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
ステップ追従時のオーバーシュート抑制用フィードフォワード項のオートチューニング方法及び装置
【課題】 オーバーシュート防止用のフィードフォワード項をオートチューニングできるようにする。
【解決手段】 上流側にFF制御ブロック5を備えたフィードバック制御系2の制御対象4の応答を入力可能なオートチューニング装置1を備える。FF制御ブロック5を無効にした状態で、ステップ目標値Xに対するステップ応答を求め、値が最大になるオーバーシュートの頂点と、与えられたステップ目標値の大きさから、オーバーシュート率αを求める。又、ステップ目標値が与えられた後にオーバーシュートの頂点に達するまでの時間から、ステップ応答の立ち上がり時間T1を求める。FF制御ブロック5に、入力されるステップ目標値Xに係数(時定数の逆数)をlog(α/(1+α))/T1とした一時遅れをかけた信号Sを出力させる指令を与える。
(もっと読む)
ステップ追従時のオーバーシュート抑制用フィードフォワード項のオートチューニング方法及び装置
【課題】 オーバーシュート防止用のフィードフォワード項をオートチューニングできるようにする。
【解決手段】 上流側にFF制御ブロック5を備えたフィードバック制御系2の制御対象4の応答を入力可能なオートチューニング装置1を備える。FF制御ブロック5を無効にした状態で、ステップ目標値Xに対するステップ応答を求め、値が最大になるオーバーシュートの頂点と、与えられたステップ目標値の大きさから、オーバーシュート率αを求める。又、ステップ目標値が与えられた後にオーバーシュートの頂点に達するまでの時間から、ステップ応答の立ち上がり時間を求める。FF制御ブロック5に、入力されるステップ目標値Xの1−(α/(1+α))倍の値の一段目のステップ信号を出力した後、ステップ応答の立ち上がり時間ごとに、増加幅がα/(1+α)倍ずつ小さくなる多段階のステップ信号Sを出力させる指令を与える。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
ロボットの制御装置
【課題】関節に連結されたリンクを揺動させるロボットの制御装置であり、可動範囲の境界付近でのオーバーシュートを抑制するとともに、可動範囲の境界付近以外では応答速度を向上させることのできるロボット制御装置を提供する。
【解決手段】ロボット制御装置は、センサによって計測された計測関節角を目標関節角に追従させるフィードバック制御器と、フィードバック制御器とロボットの機構系によって構成される閉ループ系の特性多項式の根を変更する極配置器を備えている。その極配置器は、予め定められた関節の可動範囲を、可動範囲の境界を含まない第1可動許容範囲と、第1可動許容範囲の外側に設定された第2可動許容範囲とに区分して記憶している。また極配置器は、計測関節角が第1可動許容範囲内に存する場合は前記特性多項式に複素根を設定し、計測関節角が第2可動許容範囲内に存する場合は前記特性多項式に実根を設定する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
熱処理装置の温度制御方法
【課題】高精度で且つ制御性能が高い温度制御を行うことができる熱処理装置の温度制御方法を提供する。
【解決手段】第1のPID演算要素と第2のPID演算要素とでカスケード制御を行う温度コントローラを有する熱処理装置の温度制御方法において、第1のPID演算要素の第1の操作量の上下限判定範囲を、炉内温度が目標値に一致しているときの該第1の操作量の値を基準に正負両側に略同じ値である範囲とし、かつ第1のPID演算要素で計算された第1の操作量がその上限値を超えたと判定されたときは該第1の操作量が前記上下限判定範囲の上限値になる分だけ前記第1のPID演算要素の積分操作量を増加させ、その下限値を下回ったと判定されたときは該第1の操作量が前記上下限判定範囲の下限値になる分だけ積分操作量を減少させる。
(もっと読む)
温度制御装置及び温度制御方法
【課題】オーバーシュートの発生を抑制しつつ、温度変化の立ち上がり時間を充分に短くできる温度制御装置及び温度制御方法を提供する。
【解決手段】制御対象の初期温度Ts毎に、目標温度Teを得るための操作信号Wである最終出力値Weを記憶させておき、温度制御の起動時に、そのときの初期温度Tsに対応する最終出力値Weを検索する。そして、前記最終出力値Weに所定比率Rs(<100%)を乗算して起動出力値Wsを求め、PID動作における積分動作出力の初期値として、前記起動出力値Wsを設定することで、操作信号Wをステップ的に起動出力値Wsにまで変化させる。その後、制御対象の実際の温度Tと目標温度Teとの偏差eに応じて操作信号Wを変化させ、実際の温度Tが目標温度Teに収束したときの積分動作出力を、前記最終出力値Weとして更新記憶させる。
(もっと読む)
加減速時のLPTCを使用したショートスパンシーク制御を行う磁気ディスク装置の制御装置および制御方法
【課題】ノミナルモデルが実プラントとモデル化誤差を含む場合に生じる、追従誤差を目標軌道に加え、目標軌道を再設計することにより目標軌道追従誤差を抑圧する学習型完全追従制御法(Learning based PTC:LPTC)を提案する。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、シーク制御において、出力信号から目標軌道に対する追従誤差を学習し、新たな目標軌道を再設計するための目標軌道補償信号を生成する学習信号発生器とを備える学習型完全追従制御法により制御を行う磁気ディスク装置の制御装置及び制御方法を提供する。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
モータ制御装置
【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
制御装置
【課題】オーバーシュートの発生を抑制することができる制御装置及び制御方法を提供する。
【解決手段】偏差<閾値11となるまでは(偏差≧閾値11の間は)、偏差がそのまま比例演算部2に供給されるので、比例演算部2では、一般的なP(比例)制御が行われる。そして、目標値近傍に達し、偏差<閾値11となると、スイッチ12がオンとなり、固定値(≦偏差)13が減算器14に供給される。比例演算部2では、偏差から固定値13が減算された値に基づいて、P(比例)制御が行われる。そして、偏差<閾値11になってから目標値に達して偏差が0になるまでの領域では、比例演算部2の出力が負となり、正である積分演算部3の出力と相互に打ち消しあうことになる。したがって、目標値近傍では、加算器5の出力が緩やかに変化するため、オーバーシュートの発生が抑制される。
(もっと読む)
1 - 20 / 57
[ Back to top ]