
Fターム[5H004GA14]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 制御対象の特性変動対策 (107)
Fターム[5H004GA14]の下位に属するFターム
Fターム[5H004GA14]に分類される特許
21 - 40 / 57
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
プラント最適運転計画装置
【課題】プラントの運転条件の変更に追従した最適な運転計画を立案するとともに、プラントの温度特性を反映したプラント最適運転計画装置を提供する。
【解決手段】
プラントモデルを用いてプラントの運転計画を立案するプラント最適運転計画装置において、前記プラントの状況をリアルタイムに取得する取得部と、前記取得部により取得された前記プラントの状況を前記プラントモデルに適応させることにより、プラントの運転計画をリアルタイムに作成する計画作成部と、前記計画作成部により作成された運転計画を提示する計画提示部と、定義した入力パラメータから前記プラントの設備定格出力を計算するとともに、前記プラントの運転効率補正値を計算し、パラメータ設定シートに出力する設備能力運転効率補正部とを備えることを特徴とする。
(もっと読む)
制御装置、制御モデル調整装置及び制御モデル調整方法

【課題】制御対象の入出力関係を模擬した制御モデルを用いて制御を行う際に、制御モデルと制御対象の特性の乖離により制御精度が低下しないようにする。
【解決手段】安定した実績制御量が測定されたタイミングで制御対象から実績データを取り込み、モデル調整の実行許可タイミングを生成するモデル調整起動手段を備える。そして、モデル調整起動手段に起動されたタイミングで現状の制御モデルを用いて予測制御量を算出する第1の制御量算出手段と、モデル調整起動手段に起動されたタイミングで制御モデルの調整対象のパラメータをあらかじめ定められた値だけ変化させ、同様の演算で予測制御量を算出する第2の制御量算出手段を備える。更に、第1の制御量算出手段が推定した予測制御量、及び第2の制御量算出手段が推定した予測制御量、実績制御量等を取り込み、制御モデルの調整対象パラメータの修正量を算出する制御モデル修正量算出手段を備える。
(もっと読む)
アクティブフィードバック制御装置、方法、及びプログラム
【課題】制御性能を低下させることなく、同定対象の動特性を表わすパラメータを同定対象の動作中にオンライン同定する。
【解決手段】アクティブフィードバック制御装置28は、外乱が入力される制御対象12、制御対象12を駆動するアクチュエータ14、制御対象12の状態を検出するセンサ16を含む同定対象18の動特性を表わすパラメータと、センサ16からの検出信号と、に基づいて、制御対象12が目標の状態となるような制御信号を生成して出力するコントローラ20と、平均値が略ゼロとなる乱数を発生させる乱数発生部22と、コントローラ20から出力された制御信号と、発生させた乱数を制御信号に乗算したノイズ付加制御信号と、を加算してアクチュエータ14に出力する加算部24と、同定対象18の動特性を表わすパラメータを制御対象12の動作中にオンライン同定し、同定したパラメータをコントローラ20に出力する同定部26と、を備える。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、統計モデルを構築する際に用いるデータに偏りが存在する学習型のプラントを制御する場合でも、高精度な統計モデルを構築して所望の制御効果を獲得可能なプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに制御信号を与えた時に取得する計測信号の値を推定する統計モデルと、前記統計モデルの構築に用いるデータを保存するモデル構築データベースと、モデル出力が目標値を達成するようにモデル入力の生成方法を学習する操作方法学習部と、前記モデル構築データベースに保存される情報に含まれる統計モデルの半径パラメータを調整するモデル調整部とを備え、前記統計モデルは前記モデル調整部による半径パラメータの調整結果を用いてモデル出力を生成するように構成する。
(もっと読む)
予測制御方法および予測制御システム
【課題】制御対象の出力である被制御量が複数ある多目的制御問題において、制御調整者の経験や試行錯誤による調整作業の労力を低減し、制御対象の特性変化にも適合する。
【解決手段】制御対象の動的モデルを使い、未来の制御対象の出力である被制御量を予測し、それらの予測値がそれぞれの目標値に近づくように操作量を決定する予測制御方法である。複数の被制御量に対する目標値である希求水準の入力を受け入れて希求水準を設定し、希求水準に近い最適解を算出し、最適解を表示し、最適解が所定の基準を満たしていない場合に希求水準を変更する入力を受け入れて希求水準の設定を変更し、上記ステップを繰り返し、最適解が所定の基準を満たしている場合における最適解となる操作量を決定する。
(もっと読む)
パラメータ調整支援装置
【課題】プロセスモデルのパラメータを変更しシミュレーションを実行した場合、その変更がシミュレーション結果のプラント全域に及ぼす影響を把握しやすいように視覚化し、プロセスモデルのパラメータ調整を支援する装置を提供すること。
【解決手段】実際のプラントに入力されたデータに基づきシミュレーションを実行しながら、前記プラントの出力と前記シミュレーションの結果が一致するようにパラメータを調整するパラメータ調整支援装置において、前記シミュレーションの結果を保存するシミュレーション結果データベースと、前記シミュレーションの結果と前記プラントの出力一致度を時系列的に計算する適合率計算部と、この適合率計算部の計算結果に基づき適合率の変化量を計算し、この計算結果を大きさ順に並べる適合率変化量計算整列部とを有することを特徴とするもの。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法
【課題】PIDコントローラが、精度良くプロセスを制御できるようにする。
【解決手段】チューニング装置100では、コントローラ10とプロセス20から構成される実際のシステムの操業データが利用されて、仮想のコントローラ51と仮想のプロセス52のモデル化が行なわれ、そして、得られたプロセス52のモデルが用いられて、コントローラ51の最適な制御パラメータが算出される。コントローラ10のチューニングに際し、算出された制御パラメータの数値を参考にすることができる。なお、チューニング装置100では、コントローラ51(制御ループ)ごとに制御性を評価し、制御性が低いと判断されたコントローラ51についてのみ、上記のモデル化や最適な制御パラメータの算出等が実行される場合がある。
(もっと読む)
ゲイン調整装置、ゲイン調整方法、ゲイン調整プログラム
【課題】外乱変動の影響を低減し、高精度にループゲインの調整を行うことが可能なゲイン調整装置、ゲイン調整方法、ゲイン調整プログラムを提供することを目的としている。
【解決手段】本発明では、閉ループ回路のループゲイン調整において、ループゲイン調整を複数回実行してループゲインを収束させ、ループゲインの値が収束した後に、外乱変動の影響を考慮して適切に設定された回数のループゲイン調整結果を平均した値を最終的なループゲインの値とする。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】 クーロン摩擦の影響を除去し、クーロン摩擦の大きな制御対象の慣性モーメントを高精度に同定することができ、その同定結果に基づいて制御対象を高精度に動作制御できる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】 モータ位置基本周波数成分を入力し正規化モータ加速度矩形波を出力する正規化モータ加速度矩形波演算器109と、トルク指令基本周波数成分と前記正規化モータ加速度矩形波を入力しトルク指令正規化モータ加速度矩形波乗算値を出力するトルク指令正規化モータ加速度矩形波乗算値演算器110と、前記トルク指令正規化モータ加速度矩形波乗算値を入力しトルク指令正規化モータ加速度矩形波乗算値平均値を出力するトルク指令正規化モータ加速度矩形波乗算値平均値演算器111と、前記トルク指令正規化モータ加速度矩形波乗算値平均値とモータ位置振幅を入力し慣性モーメント同定値を出力する慣性モーメント演算器113と、を備える。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
回転数制御装置
【課題】計算周期を変更することによって回転数フィードバック制御を適切に行うことが可能な回転数制御装置を提供する。
【解決手段】回転数制御装置は、回転数センサの検出値に基づいて、回転体が目標回転数となるように回転数フィードバック制御を行う。計算周期変更手段は、回転数が所定値以下となった場合に、回転数が前記所定値よりも大きい場合と比較して、回転数フィードバック制御の計算周期を長く変更する。つまり、回転数が低下した際に、回転数センサの信号処理時間を伸ばした上で、回転数フィードバック制御における計算周期を擬似的に延長する。これにより、回転数が低下した際に、回転数フィードバック制御における指令値が非連続的に変化してしまうことを適切に抑制することが可能となる。
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
倒立車輪式移動ロボットとその制御方法
【課題】重心位置や路面傾斜角が変動した場合であっても目標とする倒立走行を行うことが可能な倒立車輪式移動ロボットとその制御方法を提供すること。
【解決手段】本発明にかかる倒立車輪式移動ロボットで10は、駆動輪2を駆動する駆動部12と、倒立車輪式移動ロボット10の実状態を検出する検出部14と、検出部14によって検出した実状態と目的状態の偏差に応じて制御量を生成し、駆動部12に対して出力することにより、倒立走行を制御する倒立走行コントローラ11と、検出部14によって検出された車輪回転角速度又は車体の移動速度と、目標状態の車輪回転角速度又は車体の移動速度の偏差に応じた車体傾斜角補正量を、目標状態に含まれる目標車体傾斜角に反映させる車体傾斜角補正量算出部19とを備えている。
(もっと読む)
制御装置および制御方法
【課題】電流値の総和を制限する。
【解決手段】優先側上限処理部L_MH1と非優先側上限算出部C_MH2と優先側上限算出部C_MH1 とは、コントローラPID1,PID2から出力される操作量出力MV1 ,MV2 の総和が制御装置全体の操作量出力上限値MT1以下となるように抑制する。一方、総電流値算出部C_CTaは、操作量出力MV1 ,MV2に応じて2個のヒータに流れる電流値の総和である総電流値を算出し、総操作量値算出部C_MTaは、操作量出力MV1,MV2の総和である総操作量値を算出する。全体操作量出力上限値算出部C_MT1は、総電流値と総操作量値とから制御装置全体の操作量出力上限値MT1を修正する。
(もっと読む)
プラントの制御装置、及び火力発電プラントの制御装置
【課題】本発明の目的は、予測モデルの特性が実際のプラントの特性と相違する場合でも、プラントの制御特性を良好に維持できるプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに対する操作信号を生成する操作信号生成手段と、プラントの特性を模擬するモデルと、モデルで模擬した出力信号が予め設定された目標を満足するようにモデルの入力信号を生成する学習手段と、学習手段での学習結果に従って学習信号を計算する学習信号生成手段とを備え、更に、ある操作信号及び更新した操作信号をプラントに与えた結果として取得した該プラントの第1の計測信号及び第2の計測信号とその目標値との誤差である第1の誤差及び第2の誤差をそれぞれ計算する操作結果評価手段と、第2の誤差が第1の誤差よりも大きい場合に操作信号生成手段で生成する操作信号の補正信号を生成する補正信号生成手段とを備えるように構成した。
(もっと読む)
PID調節器を含む閉ループ系のプロセス制御装置
【課題】 PID調節器の比例ゲインが、外乱や目標値変動のような急激な変動に対応して、常に適切な値になるように自動的に算出できる、PID調節器を含む閉ループ系のプロセス制御装置を提供する。
【解決手段】プロセス1と、目標値に従って該プロセスに対する操作量を出力する、比例、積分および微分の3動作からなるPID調節器(10〜14)を含む閉ループ系のプロセス制御装置において、前記プロセスより出力される制御量の時間に対する変化率に基ずいて演算処理される制御ゲイン調整装置の出力でPID調節器の比例ゲインが可変ゲインとして設定できる手段を具備するとともに、前記制御ゲイン調整装置15は、定数発生器で発生させたしきい値α、微分した制御量φ* との間の偏差(α−φ*)を積分器30に入力し、その積分器30の出力をPID調節器の比例ゲインとするように構成した。
(もっと読む)
ニューラルネットワークを用いてコンピュータ支援によって閉ループ制御および/または開ループ制御を行う方法
本発明は、コンピュータ支援によって技術システムを閉ループ制御および/または開ループ制御する方法に関する。この方法では、強化された学習方法および人工ニューラルネットワークが使用される。ここではフィードフォワードネットワークを互いに結合して、上記のアーキテクチャが最適性判定基準を満たすようにする。ここで上記のネットワークは、観察される報酬を推定値として、予想される報酬に近似する。これによって、実際に行われる観察だけが最適に利用されて、品質関数が決定される。上記のネットワークにおいて、上記の品質関数についての最適なアクションがニューラルネットワークによってモデル化され、この学習されたニューラルネットワークにより、与えられた制御問題に対する最適なアクション選択ルールが得られる。本発明は、閉ループ制御ないしは開ループ制御を行うために任意の技術システムに使用することができ、好適な適用分野は、タービン、殊にガスタービンの閉ループ制御ないしは開ループ制御である。本発明のさらなる利点は、これが、連続的なアクションを有する制御方法に使用できることである。 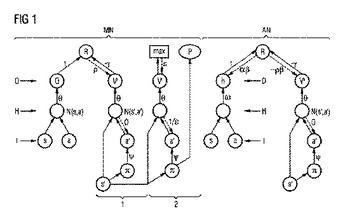 (もっと読む)
(もっと読む)
予測装置、予測方法およびプロセス制御システム
【課題】次回の処理結果の予測精度を向上させ、プロセス状態の急激な変化に迅速に追随させて制御精度を向上させる。
【解決手段】測定値取得部13によって取得された測定値データ保存部11の処理結果の測定値と、予測値データ保存部12の予測値とを用いて、平滑化定数算出部14が指数加重移動平均モデルに適用させる平滑化定数が算出され、リセット判定部15によって測定値データ保存部11のデータの削除が判定されて、データを削除する場合は、リセット部16が測定値データ保存部11の最新の測定値以外のデータを削除し、データを削除しない場合は、予測値算出部17が指数加重移動平均モデルに平滑化定数と測定値とを適用して予測値を算出するようにする。
(もっと読む)
21 - 40 / 57
[ Back to top ]