
Fターム[5H004GA14]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 制御対象の特性変動対策 (107)
Fターム[5H004GA14]の下位に属するFターム
Fターム[5H004GA14]に分類される特許
41 - 57 / 57
位置制御装置

【課題】位置制御装置における摩擦外乱を適切に補償できるようにする。
【解決手段】移動方向信号出力部27は、移動体の移動方向を判定し、その移動方向に応じた信号を出力する。移動方向信号出力部27の一方の移動方向に応じた信号をフィルタ処理する第1フィルタ回路25と、移動方向信号出力部27の他方の移動方向に応じた信号をフィルタ処理する第2フィルタ回路26を設けて外乱相殺フィードフォワード補償器(FFC)を構成する。第1フィルタ回路25は、無駄時間回路部21と正方向フィルタ23とから構成し、第2フィルタ回路26は、無駄時間回路部22と負方向フィルタ24とから構成する。正方向フィルタ23、負方向フィルタ24を通過した出力Yp 、Ym を足し合わせてFFC指令を求め、このFFC指令をモータ(駆動源)への位置指令に足し合わせて該位置指令を補償する。
(もっと読む)
発電プラントの運転最適化方法及び装置

【課題】複数のタービンを備える発電プラントにおいて、最も発電効率が高くなるように各タービンの負荷配分を制御する運転最適化方法を提供する。
【解決手段】発電プラントにおける制約条件を満たしつつ、最も高い発電効率を得る最適化制御に際して、発電プラントのモデル式から最適解を得るためのステップを、リプシッツ最適化アルゴリズムを用いるステップと、そのステップで得られた初期解を用いて逐次2次計画法を用いるステップとの2段階のステップを設け、初期解に依存して発生する局所的最適解による運転を防止する。
(もっと読む)
温度制御装置、温度制御方法および温度制御プログラム
【課題】複数の温度制御領域を持つ制御対象の多点温調制御にモデル予測制御を適用した上で、モデル予測制御の設計パラメータの最適化を図る。
【解決手段】温度制御システムには、シリンダ31の各ゾーンZ1、Z2、・・・、Znの温調制御をモデル予測制御に基づいて連携させながら行う多点温度調節手段21を設けるとともに、パネルコンピュータ22の上位にはパーソナルコンピュータ11が設け、パーソナルコンピュータ11には、モデル予測制御における設計パラメータの最適化を行うモデル予測制御支援手段12を設ける。
(もっと読む)
制御装置
【課題】制御量以外の参照パラメータの検出結果の信頼性の低下などに起因して、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、高い制御精度を確保できる制御装置を提供する。
【解決手段】制御装置1の空燃比コントローラ100は、連結重み関数Wcpiを空燃比誤差推定値Eafなどに乗算して、修正誤差Weafiを算出し、この値Weafiが値0になるように、値Dlift_bsiを算出し、連結重み関数Wcpiを値Dlift_bsiなどに乗算して、値Dlift_lsiを算出し、この値Dlift_lsiの総和である値Dliftを値Liftinに加算することにより、値Liftin_modを算出し、この値Liftin_modに応じて、空燃比をフィードフォワード制御するための第1推定吸気量Gcyl_vtを算出し、空燃比をフィードバック制御するための空燃比補正係数KAFを算出し、これらに応じて燃料噴射量TOUTを算出する。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成するものであり、第1のシミュレーションモデル作成手段と、第2のシミュレーションモデル作成手段と、を備える。第1のシミュレーションモデル作成手段は、所定の時刻で計測された実測データを基に対象の物理的な性質を考慮した第1のシミュレーションモデルを、複数の時刻で計測された実測データの夫々について作成する。第2のシミュレーションモデル作成手段は、作成された複数の第1のシミュレーションモデルを基に制御変数及び時刻を入力変数とする第2のシミュレーションモデルを作成する。これにより、経時変化による誤差を考慮したシミュレーションモデルを作成することができる。
(もっと読む)
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法
製紙機械におけるキャリパ・プロファイル不良回復装置及び方法は、プロセス制御システム(100)において、1つ以上のアクチュエータ(114〜136)について1つ以上の設定点変更を決定するステップを含む。1つ以上の設定点変更を決定するステップは、第1動作モードで動作しているときは設定点変更を増大させるか又はその頻度を高めるステップと、第2モードで動作しているときには設定点変更を減少させるか又はその頻度を低めるステップとを含む。また、1つ以上の設定点変更を前記1つ以上のアクチュエータ(114〜126)に出力するステップも含む。更に、平半紙(108)が破断し、製紙機械(102)に掛け直した後に、第1モードに入るステップも含むことができる。また、(i)第1モードに入って以来指定の時間量が経過した後、又は(ii)第1モードに入り、平半紙(108)のキャリパ・プロファイルが、所望のキャリパ・プロファイルの指定閾値以内となった後に、第2モードに入るステップを含むことができる。 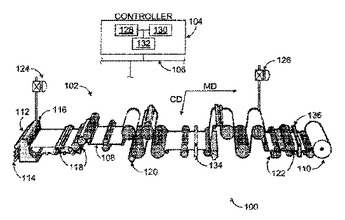 (もっと読む)
(もっと読む)
モータ制御装置
【課題】 慣性モーメントが変動しても安定で、制御性が高いモータ制御装置を提供する。
【解決手段】 位置偏差に比例ゲインを乗算し第1速度指令を生成する比例制御器(6)と、位置指令を微分し第2速度指令を生成する速度フィードフォワード制御器(8)と、速度偏差を比例・積分制御処理をし第1トルク指令を生成する比例積分器(15)と、位置偏差に比例ゲインを乗算し第2トルク指令を生成するトルクFF部(17)と、位置指令に比例ゲインを乗算し第3トルク指令を生成するトルクフィードフォワード制御器(21)と、モータ速度と速度偏差から粘性摩擦を同定する粘性摩擦同定器(20)と、第4トルク指令と粘性摩擦同定値から第5トルク指令を生成する加算器(24)と、第5トルク指令と速度偏差から慣性モーメント同定値を生成する慣性モーメント同定器(26)と、第5トルク指令と慣性モーメント同定値からトルク指令を生成する乗算器(27)とを備えた。
(もっと読む)
制御装置
【課題】プラントモデルがむだ時間を含む2次以上の高次遅れ系であっても、演算負荷を従来より軽減できるようにする。
【解決手段】制御対象(触媒+下流側排気ガスセンサ)を模擬するプラントモデルは、むだ時間を含む2次遅れ系で近似すると共に、2次遅れ系は、2つの1次遅れ系に分割して離散化した後結合して近似する。制御対象の入力をプラントモデルに入力した時のプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近付けるようにモデルパラメータを同定する。同定したモデルパラメータに含まれるむだ時間の一部の情報の変化に基づいてむだ時間を制御対象の実むだ時間に近付けるように推定する。
(もっと読む)
プラントの制御装置及びプラントの制御方法
【課題】本発明はプラントの制御を行う複数の操作端の動作速度にばらつきがある場合でもプラントを良好に制御できるプラントの制御装置を提供することにある。
【解決手段】本発明のプラント制御装置は、プラントの制御特性を模擬するモデルと、プラントに対する操作信号を演算する操作信号生成部と、制御パラメータを含む制御ロジックデータを保存する制御ロジックデータベースと、プラントを操作する操作端の操作端仕様データを保存する操作端仕様データベースと、過去の操作信号を保存する操作信号データベースと、過去の計測信号を保存する計測信号データベースと、学習パラメータの初期値の決定と学習パラメータを更新する機能を持つ学習条件決定部と、学習パラメータの制限値を拘束条件としてモデルを用いてプラントの操作方法を学習する学習部と、学習した学習情報データを保存する学習情報データベースを備えるように構成した。
(もっと読む)
電動機の制御装置
【課題】状態量指令値に影響されずに機械共振を自動的に抑制すること。
【解決手段】電動機1によって駆動される負荷4の速度を速度指令値に追従させる際に、速度制御手段6の出力信号の機械共振周波数成分を通過させるHPF9と、所定周波数以下の周波数を含む基準信号を出力する基準信号発生器10と、この出力基準信号を手段6の出力信号に加算する加算器11と、この加算出力信号を入力とし、且つフィルタ係数を変化させることにより入出力特性を変更可能な仮想フィルタ12と、この出力信号が前記基準信号に近づくように仮想フィルタ12のフィルタ係数を修正する仮想フィルタ設定部14とを備えて電動機の制御装置を構成する。
(もっと読む)
無限インパルス応答フィルタ回路、及び磁気ディスク装置
【課題】係数を適応的に変化させても安定的に動作可能なIIRフィルタ回路を提供する。
【解決手段】係数を適応的に変化させる無限インパルス応答フィルタ回路であって、 その伝達関数が、zの次数がN以下である多項式B(z)と、次数がNである多項式A(z)とを用いて、
で規定され、
として、前記多項式A(z)のzのN乗の項を1としたとき、前記Nが偶数及び奇数に対応して、前記多項式A(z)をあらかじめ定めた条件を満足するよう定められてなることを特徴とする無限インパルス応答フィルタ回路。
(もっと読む)
位置決め制御装置の制御パラメータ調整方法
【課題】推定誤差や計算誤差を含まない精度の高い最適制御パラメータを決定することができる位置決め制御装置の制御パラメータ調整方法を提供すること。
【解決手段】制御対象(3)を目標位置に位置決めする位置決め制御装置の制御パラメータを調整する方法であって、制御パラメータを所定の刻み幅で変化させ、その変化の度に位置決め制御装置の応答性を表す評価値を算出するステップと、各評価値に基づいて最適制御パラメータを決定するステップと、最適制御パラメータを位置決め制御装置に設定するステップと、含む。
(もっと読む)
磁力支持天秤装置における低周波域ゲイン倍加制御
【課題】 本発明の課題は、磁力支持天秤装置においてシステムの安定性を損なうことなく、空気力または流体力により加振された模型揺動を小さくする制御手法を開発して提示することにある。
【解決手段】 本発明の制御システムは、磁気力によって物体を空間に支持する装置のフードバック制御系において、センサーで検出した物体の位置情報から高周波成分を除去するローパスフィルターと、該ローパスフィルターの出力を入力する二重位相進み手段と、前記二重位相進み手段の出力信号を目標設定値に対して減算する手段とを備え、既存のフィードバック制御系よりも低周波域の制御性能を向上させるようにした。
(もっと読む)
プロセスの操業状態の制御方法、装置、及びコンピュータプログラム
【課題】 物理現象が複雑で非線形性が強い製造プロセスの時系列データベースに対し、指定した操業条件と類似の過去の操業事例を検索し、検索結果から将来状態を予測して操業状態を制御する方法を提供する。
【解決手段】 製造プロセスの時系列データベースを逐次作成し、現在時刻から予め指定した過去時刻までの所定のプロセス変数値を量子化し、現在時刻と合わせて検索用テーブルに格納する。制御起点時刻を起点としたプロセス変数値を量子化し、該量子化値を検索キーとして検索用テーブルを検索する。類似度基準に従い、前記検索キーと類似する量子化値を有するプロセス変数値の時刻を特定し、該プロセス変数値の制御起点時刻の操作変数の値と制御実現将来時刻の制御変数の値を取り出し、制御実現将来時刻で制御変数の値が設定した目標値に近づく操作変数の値を決定する。
(もっと読む)
制御装置
【課題】状態量差が小さくなるように制御する際に、操作量飽和などの制御上の制約が発生した場合であっても、本来の目的である状態量差を小さくするという効果が損なわれることを回避する。
【解決手段】制御装置は、各制御ループの状態量計測値を状態量変換行列により各状態量計測値を線形結合した値に変換する状態量計測値変換部6と、変換された状態量計測値とこれに対応する状態量設定値との制御偏差に基づき各制御ループの操作量を算出するPID制御演算部7−1〜7−3と、算出されたn個の操作量を操作量変換行列により各制御ループに配分されるように変換する操作量変換部9と、状態量変換行列および操作量変換行列を適応的に修正する行列修正部12とを備える。
(もっと読む)
モータ制御装置
【課題】
粘性摩擦を同定でき、その同定結果を使用して摩擦補償を行い、精度よくイナーシャを同定することができるモータ制御装置を提供する。
【解決手段】
速度指令Vrefとモデル速度Vfb’のモデル速度偏差を制御処理してモデルトルク指令を生成するモデル速度制御手段(5)と、モータ速度Vfbに係数Dを乗算して補償トルク指令を生成する補償トルク生成部(18)と、第1トルク指令と補償トルク指令を加算し第2トルク指令を生成するトルク補償手段(17)と、イナーシャを算出するイナーシャ算出手段(19)とを備え、イナーシャ算出手段(19)は、第1モータトルク指令を時間積分してモータトルク指令積分値ITrefとモデル速度制御手段が生成するモデルトルク指令を時間積分したモデルトルク指令積分値ITref’との比からイナーシャJを算出するようにした。
(もっと読む)
蒸気圧縮システムの超臨界圧力調整
蒸気圧縮システムは、圧縮器とガス冷却器と膨張装置と蒸発器とを含む。閉回路となるシステム内を冷媒が循環する。冷媒としては二酸化炭素が使用されることが好ましい。蒸気圧縮システムの性能係数を最適化するため、適応制御が採用される。システムが時間の経過とともに変化すると、システムを作動させるモデルが修正される。モデルは、可変係数を含む適応制御アルゴリズムによって決定される。モデルが変化すると、適応制御アルゴリズムの変数が変化する。それから、システムの高圧、そして性能係数を調整するために、ガス冷却器の制御装置が調節される。第一の実施例では、適応制御アルゴリズムの変数を修正して性能係数を最適化するのに、最小平均二乗法(LMS)が使用される。第二の実施例では、変化の遅い周期的加振法によって性能係数が最適化される。第三の実施例では、最適性能係数を見つけるために三角法が使用される。  (もっと読む)
(もっと読む)
41 - 57 / 57
[ Back to top ]