
Fターム[5H004GA16]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 制御対象の特性変動対策 (107) | 負荷変動によるもの (27)
Fターム[5H004GA16]に分類される特許
1 - 20 / 27
アクチュエータの制御方法及びアクチュエータの制御装置
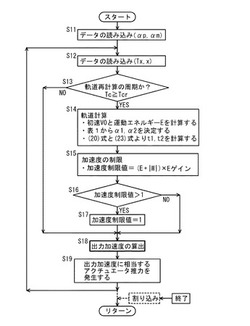
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】定常状態において電力使用量が一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないようにする。
【解決手段】電力総和抑制制御装置は、割当総電力の情報を受信する割当総電力入力部(10)と、総電力実測値を取得する総電力実測値入力部(11)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(12)と、使用電力が最大状態に到達していると見なされる状況で総電力実測値が割当総電力より小さい場合に補正係数を大きくする第2の補正係数更新部(13)と、各制御ループの電力余裕が公平な状態に近づくように操作量出力上限値を算出する電力抑制手段(14〜20)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部21と、制御ループ毎に設けられ、操作量を算出して操作量の上限処理を実行する制御部(22−i)を備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(11)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(15〜17)と、総電力実測値が割当総電力より大きい場合に補正係数を小さくする第1の補正係数更新部(21)と、総電力実測値が割当総電力より小さい場合に補正係数HSを大きくする第2の補正係数更新部(22)と、操作量出力上限値に補正係数を乗じて補正する出力上限値補正部(23)と、制御部(24−i)とを備える。
(もっと読む)
制御パラメータ推定方法及び制御パラメータ設定装置
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
プラント制御装置及び蒸気使用プラントの制御方法
【課題】蒸気負荷における蒸気の需要量が変動しても、効率を低下させることなく、蒸気使用プラントの蒸気発生装置を運転できるプラント制御装置及び蒸気使用プラントの制御方法を提供することを課題とする。
【解決手段】ボイラ10と、ボイラ10で発生した蒸気を貯蔵する蒸気アキュムレータ30と、蒸気アキュムレータ30に貯蔵される蒸気が供給される蒸気負荷20と、を含んで構成される蒸気使用プラント1に備わり、蒸気負荷20における蒸気の予測需要量を予測するとともに予測需要量に基づいてボイラ10の運転パターンを決定し、運転パターンに基づいてボイラ10を運転するプラント制御装置100及び蒸気使用プラント1の制御方法とする。そして、予測需要量の蒸気が発生するボイラ10の負荷率が、予め設定される下限負荷率より低くなる時間帯でのボイラ10の運転時間が短くなるように、運転パターンを決定することを特徴とする。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
フィードフォワード制御装置およびフィードフォワード制御方法
【課題】制御回路の構成を複雑化させることなく、変化量演算の取り扱いを容易化したフィードフォワード制御装置およびフィードフォワード制御方法を提供する。
【解決手段】フィードフォワード制御装置50Aは、あるプロセス量を指標にして先行要素の量を決定するフィードフォワード制御部21Aを具備し、フィードフォワード制御部21Aは、現在のプロセス量を入力し、サンプリング周期毎に逐次記憶する記憶部を有し、この記憶部に記憶された過去のプロセス量を入力時から所定時間経過時に出力するサンプリング遅延器51aと、サンプリング遅延器51aに入力される現在のプロセス量と記憶部に記憶された過去のプロセス量とから所定時間で変化したプロセス量の変化分を算出する減算器24とを備え、先行要素の量を減算器24で算出されたプロセス量の変化分に基づいて調整するように構成される。
(もっと読む)
ゲインスケジュール制御装置及び制御方法
【課題】 慣性や剛性、共振特性等が運転状況によって変動する機械装置に対するスケジューリング制御を簡便に実現できるようにする。
【解決手段】 ゲインスケジュール制御装置は、機械装置10に指令入力を送るコントローラ14、前記機械装置の指令入力及び出力信号に基づいて前記機械装置の運動特性の同定と前記コントローラのゲインの調整を行う適応調整器15、スケジューリングルールに基づいて前記コントローラのゲインを更新するスケジューリングルール部13を有し、前記スケジューリングルール部は、前記適応調整器の出力と、前記機械装置の運転状態量とに基づいて、前記コントローラのゲインの更新を行う。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
モータ制御装置
【課題】 制御則によらずクーロン摩擦同定が実施でき、トルク指令またはモータ速度が雑音信号を多く含み、最大静止摩擦などが存在する場合にも高精度に微少動作でクーロン摩擦同定を実施することができ、その同定結果に基づいて高精度な動作制御を実施できるモータ制御装置を提供する。
【解決手段】トルク指令周波数成分と正規化速度矩形波を入力しトルク指令正規化速度矩形波乗算値を出力するトルク指令正規化速度矩形波乗算値演算器111と、前記トルク指令正規化速度矩形波乗算値とモータ速度振幅を入力しトルク指令速度矩形波乗算値平均値を出力するトルク指令速度矩形波乗算値平均値演算器114と、前記トルク指令速度矩形波乗算値平均値と前記モータ速度振幅を入力しクーロン摩擦同定値を出力するクーロン摩擦演算器115と、を備える。
(もっと読む)
制御装置及び制御方法
【課題】関節がギア・モータ系で構成されるマニピュレータにおける、完全に測定することができないパラメータ変動を簡易な方法により調整する。
【解決手段】マニピュレータ先端を壁などの固定部に押し当てて、力目標入力fref(N)で押し当てると、ギア・モータだけでなくリンク機構部分のばらつきも含んだ形で力出力fout(N)が出力される。それら2つの値を比較して、R(s)内部の直列ゲインをKrとしたとき、(fout/fref)×Kr=1となるようにKrを設定しR(s)を設計する。制御器内の各関節軸のR(s)すべてに反映させ、パラメータばらつきが原因のfref→foutの制御偏差を0にするように調整する。
(もっと読む)
ポンプ台数制御方法及び装置
【課題】急激な水位変動が生じても水位変動に応じて確実に各排水ポンプを運転制御し、通常時のエネルギー消費を低減するポンプ台数制御方法を提供する
【解決手段】水位に応じて複数のポンプの運転台数を制御するポンプ台数制御方法である。水位がいずれかのポンプ7の起動水位まで上昇すると、ポンプ7とこのポンプに回転動力を与える機関4との間の継手5を閉じてポンプ7を起動するとともに、水位の上昇率に基づいて、起動されたポンプ7の次に起動されるポンプ7に回転動力を与える機関4の台数が選択される。そして、この選択された台数の機関4をアイドリング状態とする。このアイドリング状態は、一定時間経過してもポンプ7が起動しない場合、アイドリングを停止する。
(もっと読む)
駆動装置、画像形成装置
【課題】低コストで適切に駆動手段のフィードフォワード制御を行うことができる駆動装置、及び、その駆動装置を用いた画像形成装置を提供する。
【解決手段】駆動源と、駆動源により駆動される被駆動部と、被駆動部での非周期的な速度変動を検知する速度変動検知手段と、速度変動検知手段により検知された非周期的な速度変動を低減するように予め設定されたフィードフォワード目標値を用いてフィードフォワード制御を行なう駆動制御部とからなる駆動装置において、上記速度変動検知手段により検知される速度変動は所定時間幅と所定振幅とからなる正弦波であり、上記フィードフォワード目標値は、上記所定時間幅と上記所定振幅とから求められる上記正弦波を矩形近似した矩形波とするものである。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 負荷変動などの悪影響を抑制し、ロバストかつ目標指令に対して高速な追従性能を実現することができるサーボ制御装置とその制御方法を提供する。
【解決手段】 モデル位置制御部(72)と、第1モデル速度制御部(74)と、第2モデル速度制御部(76)と、モデルトルク指令により加速されモデル速度を生成するノミナルプラント(77)と、第2モデル速度の高域を遮断し第1モデル速度生成する第3ローパスフィルタ(78)と、第1モデル速度を積分してモデル位置を生成するモデル積分部(79)と、からなる規範モデル部(7)を備え、第1モデル速度指令と速度指令を加算して新たな速度指令を生成し、第1トルク指令とモデルトルク指令を加算して新たな第1トルク指令を生成し、モデル位置を第1位置指令とする。
(もっと読む)
パンタグラフの集電方法及び装置、並びに電動式パンタグラフの実装方法及び装置
【課題】電動式パンタグラフの実装を可能にし、すり板とトロリー線の接触力の変動を早い速度で精度よく抑制し、構成を簡略化してメンテナンスを軽減し、万一電動アクチュエータが故障した場合にもパンタグラフの機能を維持してパンタグラフの信頼性を高める。
【解決手段】少なくともすり板11が先端ばね12で支持された弾性支持装置9を電車屋根部7に配置してすり板11をトロリー線6に押付けて集電を行う際に、弾性支持装置9を押付緩衝装置と電動アクチュエータ19の両方を用いて電車屋根部7に支持し、すり板11に設置した加速度計24と先端ばね12に設置した歪み計25の信号に基づいたH∞制御器23からの制御信号uにより電動アクチュエータ19を駆動して、すり板11とトロリー線6との接触力の変動が抑制されるようにすり板11の押付け力を制御する。
(もっと読む)
PID制御装置および制御パラメータ更新方法
【課題】PID制御のための制御パラメータとして、個々に最適な値を設定すること。
【解決手段】PID制御装置1の生成手段42は、所定の周波数で変化する信号あるいはデータを生成する。加算手段43は、生成手段42が生成した信号あるいはデータを、目標値に基づくPID制御信号あるいはPID制御データに加算し、PID制御対象21などへ供給する。更新手段41は、PID制御対象21などによる動作の検出信号あるいはデータに含まれる、所定の周波数で変化する信号あるいはデータに基づく変化量に応じてPID制御信号を生成するための制御パラメータ36を更新する。
(もっと読む)
電動機の制御装置
【課題】繰返し運動を含む重畳的運動を指令する目標位置指令の反復性が失われている場合にも、位置偏差に基づいて適正な学習制御を行なうことができるようにする。
【解決手段】制御装置10は、繰返し運動を含む重畳的運動を指令する目標位置指令Cpと電動機12の出力部14からの位置フィードバック量Fpとの位置偏差Dpに基づき学習データLを求めて記憶する学習制御手段16を備える。学習制御手段は、予め定めた学習周期で位置偏差Dpに基づき学習データLを求めて記憶する第1の学習部30と、目標位置指令Cp及び位置フィードバック量Fpの少なくとも一方が、第1の学習部の学習周期とは異なる周期で生じる局部変化を含むときに、局部変化の影響を排除するように学習データLを補正する学習データ補正部32と、学習データ補正部が補正して得られた補正学習データALを用いて、位置偏差Dpを補正する位置偏差補正部34とを備える。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
火力発電プラントの起動スケジュール管理方法
【課題】 各系列の軸台数スケジュールを決めるには各起動モード毎に概略の時間表はあるが、各種条件により起動所要時間は大幅に変わってくるので、実際に系列制御用計算機に起動開始時刻を入力して時間の把握をしていた。そのために実際に発電プラントに起動スケジュールが登録され、登録の解除を忘れると起動操作が進行する恐れがある問題点があった。
【解決手段】 複数軸の発電ユニットを有する火力発電プラントにおいて、予め起動操作工程ごとに所要時間を計算するプログラムを用意し、該プログラムに従ってパソコン上に起動操作開始時刻から各起動操作工程の予想時間を算出し、各軸の運転のシミュレーションを行い、その後系列制御計算機に起動開始時刻を入力して登録して実際の起動操作を行うことを特徴とする。
(もっと読む)
1 - 20 / 27
[ Back to top ]