
Fターム[5H004GA29]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 安全性の向上 (30)
Fターム[5H004GA29]に分類される特許
1 - 20 / 30
多重系モータの制御装置及び移動体
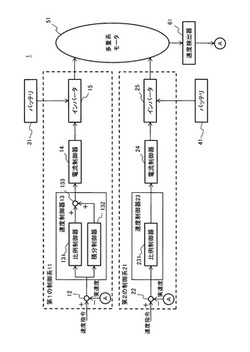
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
システム同定装置及び同定方法

【課題】プラントの動特性変化を、オペレータにわかりやすいモデルパラメータを用いて、定量的に、日常の制御計算に影響を与えない低計算負荷でプラント操業運転を停止することなく同定するシステム同定装置及び同定方法を提供する。
【解決手段】応答データ記憶装置10から同定処理駆動イベントを検出する同定処理駆動イベント検出装置40、検出された同定処理駆動イベント前後の応答データを切り出す応答データ切り出し装置50、切り出された応答データをもとにプラント動特性変化を同定する動特性変化同定装置60、同定された動特性変化分が与えられた動特性変化検出条件を満たすかどうかを判定し、該条件を満たす場合には表示出力指示を行う動特性変化検出装置70を備える。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
簡易手動自動切り替え装置
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
PID制御装置及びPID制御方法
【課題】高速応答が求められる制御システムにおいて、PIDパラメータを自動設定する。
【解決手段】PID制御部11をP制御状態とし、目標値入力を一定とした状態で、オートチューニング部12はPID制御部11の比例ゲインKpを徐々に増大させる。Kpの増大に伴い、偏差に振動が発生する。FFT解析部13は偏差を周波数解析して振動の周波数を検出する。フィルタ14は偏差から振動周波数の成分を抽出しRMS処理部15に出力する。RMS処理部15は偏差の振動の1周期ごとに実効値を算出し、複数周期連続して増加していることを検出したときに、オートチューニング部12にトリガー信号を送出し、PID制御部11のKpの値を下げる。オートチューニング部12はトリガー信号を受信すると、そのときの比例ゲインKpc及び固有振動の周期TcからPIDパラメータを決定する。
(もっと読む)
道路トンネル換気制御装置及び道路トンネル換気制御方法
【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
制御装置及び通信管理方法
【課題】通信異常発生時、プロセスデータを取得できるまでの遅延時間を短縮できるよう
にすると共に、分散型制御システムにおける制御動作の安定化を実現できるようにする。
【解決手段】2つの通信バスα及びβに接続され、バス切り換え機能を有して通信バスを
監視し、当該通信バスの一時異常及び正常を判別するCPU10と、通信バスを介してC
PU10に接続され、フィールド機器から入力したプロセスデータを通信バスを介してC
PU10に出力すると共に、通信バスを介して当該CPU10から入力した制御データを
フィールド機器に出力する1つ以上のIOM部14等とを備え、CPU10は、一方の通
信バスの状態が一時異常であると判別したとき、一時異常と判別された通信バスから正常
な状態の通信バスにIOM部14等の接続を切り換えるものである。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
石油化学プラントのバルブ制御装置
【課題】制御モード切替操作部によりリモート制御モードとローカル制御モードの何れかに切替操作された場合に、適正なプラントの運転状態を維持することができる石油化学プラントのバルブ制御装置を提供する。
【解決手段】開度センサから入力されるバルブ開度値とバルブに対する制御指令値に基づいてバルブを駆動制御する制御部と、主制御装置から入力される制御指令値に基づいてバルブを駆動制御するリモート制御モードと、手動操作部から入力される制御指令値に基づいてバルブを駆動制御するローカル制御モードの何れかの制御モードに制御部を切替操作可能な制御モード切替操作部と、制御モード切替操作部が切替操作されたときに、手動操作部から入力される制御指令値と、主制御装置から入力される制御指令値との偏差に基づいて、制御モードを切り替えるか否かを判断する制御モード切替制御部を制御部に備えた石油化学プラント制御装置。
(もっと読む)
モデル予測制御装置
【課題】モデル予測制御の実行中になんらかの制御計算上の不具合が発生した場合に、安全のため上位のモデル予測制御系を切り離し、滑らかに下位制御系のみの制御へ移行して制御を継続することができるモデル予測制御装置を提供する。
【解決手段】目標値生成器10、モデル予測制御器(MPC)20、切替器100、下位制御器(LC)30、および、制御対象(P)40から構成される。通常では、切替信号FLG_LCはフラグが0の状態に置かれてMPC20による最適化処理が実行される。しかし、MPC20内の最適化処理が重くなり、たとえば実行時間が制御周期内に収まらない事態が発生したと判断された場合には、MPC20は切替信号FLG_LCのフラグを1に切り替える。このフラグ“1”は切替器100に伝えられ、切替器100はMPC20利用の状態から下位制御系のみの状態へ滑らかに移行する。
(もっと読む)
アナログ出力回路、流量制御装置及び流量制御装置の出力異常判別方法
【課題】 デジタルアナログコンバータ等の異常を確実に検知するとともに安価なアナログ出力回路と、これを用いた質量流量制御装置を提供する。
【解決手段】デジタル演算回路からのデジタル出力信号をデジタルアナログコンバータとゲイン回路を介してアナログ信号を出力するアナログ出力回路である。デジタル演算回路には、パルスワイドモジュレーションとアナログデジタルコンバータが内蔵され、デジタルアナログコンバータのDAC出力信号と、パルスワイドモジュレーションの出力をローパスフィルタを介して一定電圧としたPWM信号とを加減算回路に入力し、加減算回路にてDAC出力信号とPWM信号との加減算結果を、アナログデジタルコンバータに出力し、デジタル演算回路は、加減算結果に基づいて、異常信号を出力する。
(もっと読む)
連携制御方法
【課題】 高度なデータ通信網を必要とすることなく、管理装置無しで、簡易に連携制御を可能とする。
【解決手段】 複数の装置1,1,…が共有して使用する共有機器5を同時に使用しないように制御する連携制御方法であって、各装置1が一つの排他信号を共有し、少なくとも一つの装置が排他信号をONすると、他の各装置1に排他信号ONが入力される排他信号共有手段24を備え、共有機器5を使用したい各装置1は、他装置1により排他信号がONからOFFとされたとき、第一待ち時間の計時を開始し、第一待ち時間経過後に排他信号がOFFという条件下で排他信号をONして共有機器5を占有する。
(もっと読む)
電気機器の運転制御装置
【課題】停電中においても制御部の時計機能を長時間にわたって有効な状態に維持できるため停電からの復帰時にも停電前と略同様な運転制御を行え、しかも低コストに実施可能な電気機器、例えば貯湯式給湯機の運転制御装置を提供する。
【解決手段】交流電源1にスイッチング電源2を介して接続された制御部10を有する貯湯式給湯機の運転制御装置である。停電検出手段20を備え、また、制御部10とは並列にバックアップコンデンサ28を接続する。上記停電検出手段20は、停電時のスイッチング電源2のコンデンサの放電が終了する前の段階で停電検出信号を出力可能に構成する。そして、停電検出信号が出力されたときに制御部10がスタンバイモードへと移行する。スイッチング電源2のコンデンサ放電の後は上記バックアップコンデンサ28から制御部10へと給電を行う。
(もっと読む)
誤差過大検出機能を有する制御装置
【課題】フィードフォワード制御が導入された制御装置の位置偏差異常をいち早く検出する。
【解決手段】位置偏差推定処理部40において、例えば式V/PG×(1−α)(ただし、V:位置指令の1階微分値、PG:位置制御器16におけるポジションゲイン、α:フィードフォワード項算出部32におけるフィードフォワード係数)により位置偏差推定値Errを算出し、それにマージンΔEを加算した誤差過大検出レベルにより位置偏差の異常を検出する。
(もっと読む)
制御装置および異常判定装置
【課題】むだ時間の変化を逐次推定し高精度な制御を実施することができる制御装置を提供する。
【解決手段】制御対象を離散数式モデルで表したプラントモデルを用い、該プラントモデルに制御対象への入力を加えた際の出力であるプラントモデル出力と制御対象の実出力との差である同定誤差をゼロに近づけるようにプラントモデルのパラメータを同定する。このとき、同定処理により算出された離散モデルパラメータ、若しくは離散モデルパラメータに基づいて算出されるむだ時間以外のパラメータの変化により、むだ時間の信頼性を判定することで、むだ時間を精度良く算出することが可能となる。
(もっと読む)
ボイラプラントの制御装置
【課題】制御対象を模擬したモデルと実際の制御対象との挙動との間に誤差がある場合でも、局所最適解に陥るリスクを極力排除して制御対象を安全で安定に運転制御して最適解を探索できるボイラプラントの制御装置を提供する。
【解決手段】ボイラプラントの計測データを入力してプラント運転特性を模擬したプラントモデルに基づいてボイラプラントへの運転操作指令値を演算して運転を行うボイラプラントの制御装置に、運転データを蓄積した運転実績データベースと、蓄積した運転データから操作量の変化傾向を演算してボイラプラントの状態を判定する運転状態判定手段と、プラントモデルで計算したプロセス値とボイラプラントの計測値との誤差を計算するモデル誤差評価手段と、蓄積された過去のデータを含むプロセス値と操作指令値との相関関係をモデル化する運転データモデル化手段と、前記誤差値を用いて操作指令候補値を計算する探索点決定手段とを備えた。
(もっと読む)
パラコンシステントプロセス処理順序制御方法
【課題】 プロセス処理順序制御の安全性を実時間で容易に、確実に保障するプロセス処理順序制御方法を提供する。
【解決手段】 完備束構造をなすベクトル注釈真理値(i,j){0≦i,j≦m, i,j,mは整数}によって2つのプロセス間の時間的前後関係を数値化したbf-EVALP式を用いる。2つのプロセス間の時間的前後関係についての安全性規則を、ベクトル注釈真理値(i0,j0)を付した前件部と結論部からなるbf-EVALP式で予め表しておき、プロセスの進行に伴い増加したベクトル注釈真理値(i,j)が上記bf-EVALP式のベクトル注釈真理値(i0,j0)以上になったとき、結論部が推論されることにより、実時間で安全性検証を行いつつプロセス処理を実行する。
(もっと読む)
パルス幅変調式負荷駆動装置
【課題】ノイズに強く、出力部が複数であってもそれぞれの出力部において正確なパルス状出力信号を得られ、入力端子数を少数に抑えることが可能なパルス幅変調式負荷駆動装置を提供することを目的とする。
【解決手段】第1駆動タイミング信号(c)に応じて第1出力信号(e)を負荷(5)の一端に印加する第1出力手段(3)と、第2駆動タイミング信号(d)に応じて第2出力信号(f)を負荷(5)の他端に印加する第2出力手段(4)と、所定の区間毎に前記負荷(5)の両端に電位差を発生させる時間情報(以下、差電圧時間情報と呼ぶ)を任意のビット数で表したシリアル信号の駆動入力信号(a)をパラレル信号(b)に変換する信号変換手段(1)と、前記パラレル信号(b)に応じて前記第1,第2駆動タイミング信号(c,d)を生成する駆動タイミング生成手段(2)とを設け、前記第1,第2出力信号(e,f)のパルス幅を増減し負荷(5)を駆動する。
(もっと読む)
コネクタのクランプ機構およびこれを用いたコントローラ
【課題】振動や衝撃などに対するコネクタ接点不良を改善すると共にプリント配線基板の集積化が可能な小型化したコネクタ固定部材を用いたコントローラを提供する。
【解決手段】CPUや制御回路が実装されたプリント配線基板と、前記プリント配線基板に実装されたプリント配線基板側コネクタと、前記プリント配線基板側コネクタに勘合する電線側コネクタと、前記プリント配線側コネクタと前記電線側コネクタを固定するクランプ機構とを備えたコネクタのクランプ機構において、前記クランプ機構は、コネクタ側固定部と基板側固定部と、前記コネクタ側固定部と前記基板側固定部間に弾性体を備え、前記コネクタ側固定部と前記基板側固定部が前記弾性体により閉じるように形成されたものである。
(もっと読む)
制御システム
【課題】本発明はシステムプログラムの更新を行なう制御システムに関し、システムプログラム更新時においても、制御系の動作を安定に維持することができる制御システムを提供することを目的としている。
【解決手段】エンジニアリングコンピュータ30で安全システム制御ステーション40のシステムプログラムの更新を行なうようにした制御システムにおいて、
前記エンジニアリングコンピュータ30内にシステムプログラムを更新するシステムプログラム更新ツール31を設け、前記安全システム制御ステーション40内に、前記システムプログラム更新ツール31からのシステムプログラム更新要求が入った時には、制御システムで制御される出力モジュール20の動作状態をその時の状態に維持する制御手段41を設けて構成される。
(もっと読む)
1 - 20 / 30
[ Back to top ]