
Fターム[5H004HA20]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | その他 (27)
Fターム[5H004HA20]に分類される特許
1 - 20 / 27
プラントの制御装置
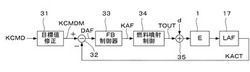
【課題】 フィードバック制御を行うフィードバック制御器の伝達関数を、制御対象であるプラントに加わる外乱の影響を考慮して適切に設定し、設計工数を抑制しつつ良好な制御性能を得ることができるプラントの制御装置を提供する。
【解決手段】 フィードバック制御器33は、プラント(1,17)の制御出力(KACT)が目標値(KCMDM)と一致するように、プラントへ入力する制御入力(KAF)を算出する。フィードバック制御器33の伝達関数C(z)は、プラントをモデル化することにより得られる制御対象モデルの伝達関数P(z)の逆伝達関数と、制御入力(KAF)に印加される外乱dの制御出力(KACT)への感度を示す感度関数S(z)を用いて定義される外乱感度相関関数との積で表され、感度関数S(z)は、プラントの応答特性を示す応答特性パラメータ(α)を用いて定義される。
(もっと読む)
外乱抑制荷重制御装置

【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
学習制御システム及び学習制御方法
【課題】自然勾配法を適用した、計算時間の短い強化学習システム及び強化学習方法を提供する。
【解決手段】学習制御システムは、状態Siに対応する行動価値Oiの更新量を求める第1の学習器103と、状態Siをさらに分割した状態Si,jに対応する行動価値Oi,jの更新量を求める第2の学習器105と、第1及び第2の学習器による行動価値の更新量の、行動価値の空間(Oi,Oi,j)における勾配を自然勾配法の勾配へ変換し、更新前の行動価値に加算することによって行動価値を更新する行動価値決定器107とを備えている。
(もっと読む)
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
制御装置、制御モデル調整装置及び制御モデル調整方法
【課題】制御対象の入出力関係を模擬した制御モデルを用いて制御を行う際に、制御モデルと制御対象の特性の乖離により制御精度が低下しないようにする。
【解決手段】安定した実績制御量が測定されたタイミングで制御対象から実績データを取り込み、モデル調整の実行許可タイミングを生成するモデル調整起動手段を備える。そして、モデル調整起動手段に起動されたタイミングで現状の制御モデルを用いて予測制御量を算出する第1の制御量算出手段と、モデル調整起動手段に起動されたタイミングで制御モデルの調整対象のパラメータをあらかじめ定められた値だけ変化させ、同様の演算で予測制御量を算出する第2の制御量算出手段を備える。更に、第1の制御量算出手段が推定した予測制御量、及び第2の制御量算出手段が推定した予測制御量、実績制御量等を取り込み、制御モデルの調整対象パラメータの修正量を算出する制御モデル修正量算出手段を備える。
(もっと読む)
操舵制御装置
【課題】周波数特性の解析等の複雑な処理を用いなくとも、制御に起因する発振状態と周期的なヨーイングとを正確に区別することができる操舵制御装置を提供する。
【解決手段】方位センサ12は、船首方位θHを検出し、ロール角センサ15は、ロール角を検出する。加算器13は、方位設定部11から出力された目標方位θrから船首方位θHを差分して偏角θ=θr−θHを求める。制御状態監視部14は、偏角θおよびロール角の時間的変動を監視する。制御状態監視部14は、偏角θが周期性を有し、かつロール角が周期性を有する場合、発振状態ではない(外乱の影響により周期的なヨーイングが発生している)と判断し、制御部16の制御パラメータを上昇させる。
(もっと読む)
多目的最適解集合算出装置及び多目的最適解集合算出方法及び多目的最適解集合算出プログラム
【課題】所定の駆動基準を充足する全体最適解の集合を算出すること。
【解決手段】複数の駆動状態の複数の組み合わせ毎に基づいて算出されたトレードオフ関係にある複数の目的関数の組み合わせを最小化又は最大化する設計変数の部分最適解の集合と、複数のステップから構成されステップ毎に前記駆動対象の駆動条件が異なる駆動基準のステップ毎の駆動条件の値を入力する入力部1と、複数の駆動状態の複数の組み合わせ毎に抽出される部分最適解に基づいて、駆動状態の範囲内の部分最適解を予測可能な達成値マップを作成する達成値マップ作成部201と、駆動状態の項目毎に作成される達成値マップから達成値を抽出する達成値抽出部202と、達成値を前記駆動基準のステップ毎に積算して算出される総和達成値から全体最適解の集合を算出する全体最適解算出部21とを備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
道路トンネル換気制御装置及び道路トンネル換気制御方法
【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
リアルタイムでの精製所水素ガス供給、分配及び消費の最適化
本発明は、広範囲にわたる水素ガス及び関連する軽質ガスの供給、分配及び使用をモデル化することができるように基本制約を取り込み、動的過程を処理し、及び構造を制御する革新的な独自の数理モデルに関する。本発明はまた、精製所における水素及び関連する軽質ガスの供給及び分配、及びそれにより消費を効率的に最適化するための、前記モデルを用いて目的関数の解を求めるリアルタイム最適化(RTO)コンピュータアプリケーション、並びにそれを使用した方法及び精製所にも関する。目的関数は、水素供給及び分配コストの最小化、又は水素システム内の水素消費部によって作られる製品の評価額から対応する水素供給及び分配コストを差し引いたものに基づく収益の最大化などの、経済的目的関数であってもよい。  (もっと読む)
(もっと読む)
制御パラメータの適合化システム
【課題】事前に目標となる数値を定めることが困難な制御システムにおいても、最適な適合値を自動的に推定する。
【解決手段】エンジン1から排出される排気ガスの各成分量を分析する排気ガス分析計20の出力に基づいてECU10による空燃比制御における目標空燃比の指示値を制御部40で生成し、排気ガス分析計20及びエンジン1のO2センサの出力に基づいて状態評価部30で空燃比の制御状態を評価する。そして、状態評価部30の評価結果に基づいて制御部40で生成した指示値を適合値推定部50で調整して目標空燃比が最適な値となるように適合させ、最終的にECU10に格納される目標空燃比を確定する。これにより、空燃比目標値を予めマップに格納しておく場合等に、開発者の経験が必要なマップ作成作業を自動的且つ効率的に行なうことが可能となり、車両開発時における工数を低減してコスト低減を図ることができる。
(もっと読む)
車載機器の制御装置及び制御方法
【課題】少なくとも一つの車載機器に対する複数の操作の提案順序を適切に決定できる車載機器の制御装置及び制御方法を提供する。
【解決手段】制御装置は、少なくとも一つの車載機器に対する二つの操作について、その二つの操作のうちの一方が実行された後に他方の操作が実行される遷移確率を記憶した記憶部(21)と、車載機器に関する少なくとも一つの推薦操作を選択する推薦操作決定部(23)と、推薦操作決定部(23)により複数の推薦操作が選択されたとき、その複数の推薦操作の提案順序を、記憶部(21)に記憶された遷移確率に従って決定する提案順序決定部(24)と、複数の推薦操作を、提案順序決定部(24)により決定された提案順序に従って、少なくとも一つの車載機器に対して実行する制御部(27)とを有する。
(もっと読む)
制御装置
【課題】開発効率を改善することが可能な制御装置を提供する。
【解決手段】操作量としてのソレノイド駆動デューティduty_solの入力から制御量としての実トルクTaの出力までの過程が複数の制御要素としてのソレノイド駆動回路2、油圧制御部3、クラッチ4及びギヤトレーン5に区分可能な自動変速機1を制御対象とし、実トルクTaに対する目標値Ttに基づいてソレノイド駆動デューティduty_solを演算する制御装置11において、制御要素2〜5のそれぞれと対をなすように設けられ、対応する制御要素の出力から入力を逆算するように構成された複数の逆算部12〜15を具備し、目標値が逆算部12〜15にて順次逆算されてソレノイド駆動デューティduty_solが演算されるように逆算部12〜15を制御要素とは逆順で組み合わせる。
(もっと読む)
石油化学プラントのバルブ制御装置
【課題】制御モード切替操作部によりリモート制御モードとローカル制御モードの何れかに切替操作された場合に、適正なプラントの運転状態を維持することができる石油化学プラントのバルブ制御装置を提供する。
【解決手段】開度センサから入力されるバルブ開度値とバルブに対する制御指令値に基づいてバルブを駆動制御する制御部と、主制御装置から入力される制御指令値に基づいてバルブを駆動制御するリモート制御モードと、手動操作部から入力される制御指令値に基づいてバルブを駆動制御するローカル制御モードの何れかの制御モードに制御部を切替操作可能な制御モード切替操作部と、制御モード切替操作部が切替操作されたときに、手動操作部から入力される制御指令値と、主制御装置から入力される制御指令値との偏差に基づいて、制御モードを切り替えるか否かを判断する制御モード切替制御部を制御部に備えた石油化学プラント制御装置。
(もっと読む)
学習装置及び燃料噴射システム
【課題】演算処理量の減少を図った学習装置及び燃料噴射システムを提供する。
【解決手段】燃圧センサの検出波形について、その検出波形についてモデル式により表されたモデル波形の実検出波形に対する近似度を高めるよう、モデル式に含まれる複数のパラメータの値を学習する学習装置において、複数のパラメータを、そのパラメータ毎に設定された基準値に対して増大側及び減少側のそれぞれに変更し(S52)、複数のパラメータについて変更の組み合わせ毎に近似度を算出し(S53)、基準値における近似度ΣMが、変更後の各々の近似度Σq,Σr,Σs,Σtのいずれよりも高いとの更新終了条件を満たしていない場合に、各々の近似度のうち最も近似度が高くなっているときの変更の組み合わせを基準値として更新する(S56)。そして、更新終了条件を満たしている場合には、各々の基準値を複数のパラメータの学習値として決定する(S55)。
(もっと読む)
調節計およびその調整方法
【課題】モータおよび/またはポテンショメータとの間が誤配線(誤接続)が許容し得る場合には、そのまま初期設定を行って前記モータを制御することのできる調節計の調整方法を提供する。
【解決手段】モータに逆転駆動した状態でポテンショメータの抵抗値の変化が停止したときの該ポテンショメータの抵抗値を第1の基準抵抗値として検出した後、前記モータを正転駆動状態で前記ポテンショメータの抵抗値の変化が停止したときの該ポテンショメータの抵抗値を第2の基準抵抗値として検出し、前記モータの回転方向に応じて前記第1および第2の基準抵抗値を前記モータの回転角制御の基準(0%抵抗値および100%抵抗値)として設定する。
(もっと読む)
ファジィ制御装置、プラントシステム、および、ファジィ制御方法
【課題】制御ルールをもとにファジィ制御を行うプラントシステムにおいて、制御精度の向上、および、制御ルールの調整期間の短縮化をすること。
【解決手段】ファジィ制御装置13は、制御ルール空間から制御が悪化する可能性の有る悪化制御ルール空間を決定する悪化制御ルール空間決定機構7と、悪化制御ルール空間から、全プラントに対する制御ルールを示す1本の遺伝子を作成する制御ルール抽出機構8と、制御ルール抽出機構8が絞り込んだ制御ルールに基づいて各プラントを制御した制御結果を、所定の評価関数で評価する評価機構4と、評価機構4の評価結果に基づいて、各プラントの制御中に、制御ルール抽出機構8が作成した遺伝子を遺伝的アルゴリズムにより最適化する遺伝的操作機構10と、を有する。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
予測装置、予測方法およびプロセス制御システム
【課題】次回の処理結果の予測精度を向上させ、プロセス状態の急激な変化に迅速に追随させて制御精度を向上させる。
【解決手段】測定値取得部13によって取得された測定値データ保存部11の処理結果の測定値と、予測値データ保存部12の予測値とを用いて、平滑化定数算出部14が指数加重移動平均モデルに適用させる平滑化定数が算出され、リセット判定部15によって測定値データ保存部11のデータの削除が判定されて、データを削除する場合は、リセット部16が測定値データ保存部11の最新の測定値以外のデータを削除し、データを削除しない場合は、予測値算出部17が指数加重移動平均モデルに平滑化定数と測定値とを適用して予測値を算出するようにする。
(もっと読む)
パンタグラフの集電方法及び装置、並びに電動式パンタグラフの実装方法及び装置
【課題】電動式パンタグラフの実装を可能にし、すり板とトロリー線の接触力の変動を早い速度で精度よく抑制し、構成を簡略化してメンテナンスを軽減し、万一電動アクチュエータが故障した場合にもパンタグラフの機能を維持してパンタグラフの信頼性を高める。
【解決手段】少なくともすり板11が先端ばね12で支持された弾性支持装置9を電車屋根部7に配置してすり板11をトロリー線6に押付けて集電を行う際に、弾性支持装置9を押付緩衝装置と電動アクチュエータ19の両方を用いて電車屋根部7に支持し、すり板11に設置した加速度計24と先端ばね12に設置した歪み計25の信号に基づいたH∞制御器23からの制御信号uにより電動アクチュエータ19を駆動して、すり板11とトロリー線6との接触力の変動が抑制されるようにすり板11の押付け力を制御する。
(もっと読む)
1 - 20 / 27
[ Back to top ]