
Fターム[5H004HB07]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 変位、角度、位置、方向、姿勢 (374)
Fターム[5H004HB07]に分類される特許
1 - 20 / 374
多数の自由度系の思考可能なハンズフリー制御
駆動システム及び駆動方法、並びに露光装置及び露光方法
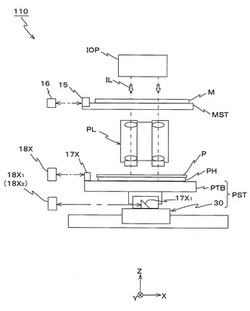
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
安全計装システム

【課題】緊急遮断弁のパーシャルストロークテスト実施に伴うプラントのプロセス値の変動を抑える。
【解決手段】制御部10は、予め記憶されている緊急遮断弁5に係るCV特性データを用いて、現在の遮断弁開度(Xs)に対応するCV値を求め、これより損失CV値を求める。更に、予め記憶されている流量調整弁4に係るCV特性データと流量指示調節計6の出力とに基づいて、調整弁4の現在の弁開度に対応するCV値を求める。そして、この流量調節弁CV値と、上記損失CV値とに基づいて、流量調整弁4の弁開度に係る補正出力を生成し、これに基づいて流量調整弁4の弁開度を増加させる。
(もっと読む)
制御装置及び制御方法
【課題】状態に応じて制御則を切り替えて操作量を演算する制御装置及び制御方法のために演算負荷を低減する手法を提供する。
【解決手段】制御装置100は、状態空間を分割する複数の凸多面体の各々に制御則が対応付けられており、状態ベクトルの属する凸多面体に対応する制御則を使用して操作量を演算する速度制御器110と、状態空間を規則的に区切る複数のメッシュのうち状態ベクトルの属するメッシュに関連する制御則を候補として、状態ベクトルの属する凸多面体に対応する制御則を該候補から決定する検索器112と、を備える。
(もっと読む)
ロボット制御システム、ロボットシステム及びセンサー情報処理装置
【課題】 ハードウェアー化や安定性の検証や解の応答性の切り替えを容易にするロボット制御システム、ロボットシステム及びセンサー情報処理装置等を提供すること。
【解決手段】 ロボット制御システムは、力覚センサー10からのセンサー情報に基づいて、ロボット100の目標軌道の補正値を出力する力制御部20と、目標軌道に対して補正値に基づく補正処理を行なって目標値を求め、求めた目標値を出力する目標値出力部60と、目標値に基づいてロボット100のフィードバック制御を行うロボット制御部80とを含み、力制御部20はデジタルフィルター部22を有し、力制御部20はセンサー情報に対してデジタルフィルター部22によるデジタルフィルター処理を行うことで、力制御における常微分方程式の解を求めて、求めた解に基づいて補正値を出力する。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】コアを有するモータを制御する際の位置決め精度を向上させるモータ制御装置、及びモータ制御方法を提供する。
【解決手段】コイルが巻回されたコアを有するモータを制御するモータ制御装置は、前記モータの可動子の位置から電気角を算出する電気角算出部と、前記電気角算出部が算出した電気角に応じた制御ゲインを用いて、前記モータの駆動を制御する制御部とを具備する。
(もっと読む)
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
センサ情報の統合方法と装置
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
制御装置、照射装置及び駆動装置
【課題】複数のモータの制御において、同期の高精度化及び制御の高速化の両立に有利な技術を提供する。
【解決手段】複数のモータのそれぞれについてフィードフォワード制御器を備え、前記複数のモータをそれぞれ制御する制御装置であって、前記フィードフォワード制御器の少なくとも1つは、当該フィードフォワード制御器が制御対象とするモータとは異なる少なくとも1つのモータの入出力特性を表す関数を含む、ことを特徴とする制御装置を提供する。
(もっと読む)
マルチレート系の高速周波数応答同定法および高速周波数応答同定装置
【課題】制御出力のサンプリング周期が制御入力のそれの偶数倍である入力多重マルチレート系において、制御入力側のサンプリング周期における制御対象の周波数応答を同定する。
【解決手段】制御対象をFIRモデルにより表し、M系列信号の周期Mpとマルチレート比Pに基づきデータ長MpP-1分のM系列信号を生成し、前記M系列信号と、前記M系列信号を入力して制御対象から得られる出力データに基づき、制御対象のインパルス応答推定値を計算し、インパルス応答推定値を離散フーリエ変換することによって、前記制御対象の周波数応答を同定する。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】最短時間制御にフィードバック制御の要素を取り入れたアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】最短時間制御を用いると共に、予め、計測されたアクチュエータの制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、制御のための計算を行う計算時刻t0からの経過時間表示で、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出する算出ステップと、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了する制御出力ステップを備えると共に、前記算出ステップを予め設定した時間毎に繰り返して、切替時刻t1と終了時刻t2を算出して更新する更新ステップを備える。
(もっと読む)
ハイブリッド制御デバイス
【課題】ロボット、特に周囲の状況について学習するように適合されたロボットを提供する。
【解決手段】ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。
(もっと読む)
ポテンショメータ装置
【課題】 簡単で且つ安価な構成で、ポテンショメータの摺動部に起因するノイズの影響を効果的に且つ的確に軽減除去する。
【解決手段】 目標信号源11からの目標信号は、ボルテージフォロワとして構成された第1のオペアンプ12に供給され、第1のオペアンプ12の出力点P11の電圧は、目標信号源11の出力電圧となる。この電圧に対し、ダイアル摘みの操作により設定された並列的な第1のポテンショメータ13および第2のポテンショメータ15がアッテネータとして働き、出力点P12の信号は、第1のポテンショメータ13によりアッテネートされた信号と第2のポテンショメータ15によりアッテネートされた信号との平均値となる。第2のオペアンプ18は、ボルテージフォロワとして構成されており、出力点P13の電圧は、出力点P12の信号電圧と等しくなる。この出力点P13の信号を、目標信号として制御系に入力する。
(もっと読む)
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法
【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
制御パラメータ推定方法及び制御パラメータ設定装置
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
軌道計画方法、軌道計画システム及び軌道計画・制御システム
【課題】運動コストを最小化するように状態空間を分割し、より精度よく準コスト最小軌道を計画することのできる軌道計画方法を提供する
【解決手段】本発明による軌道計画方法は、軌道計画システム(100)によって物体の状態を目標状態へ制御するための軌道を求める軌道計画方法であって、該物体の状態空間をセルに分割するセル作成部(103)が、所定のセルの数に対して、離散化による近似誤差を最小化するように該状態空間をセルに分割するステップと、探索木作成部(101)が、該状態空間において、該物体の状態遷移に対応する探索木を、該物体の状態に対応する、該探索木の枝のノードがセルに一つずつ含まれるように作成するステップと、軌道作成部(107)が、該探索木を使用して、該物体の現在の状態から目標状態までの経路を定めるステップと、を含む。
(もっと読む)
軌道計画方法、軌道制御方法、軌道計画システム及び軌道計画・制御システム
【課題】物体初期状態から目標状態までの軌道を、探索に制約を伴わずに少ない計算コスト、かつ高い精度で求めることのできる軌道計画システムを提供する。
【解決手段】軌道計画システムは、状態空間において、該目標状態を根とし、予め複数の区域に分割された状態空間のそれぞれの区域に含まれる枝のノードの数を制限することによって枝を集約した逆方向探索木を作成する探索木作成部101と、該状態空間において、該逆方向探索木上の点に対して、その領域内であれば、該逆方向探索木にしたがって該目標状態に到達しうる、移行可能領域を定める移行可能領域決定部103と、探索木及び移行可能領域を記憶する探索木記憶部104と、該逆方向探索木を使用して該移行可能領域内の点から該根までの、該物体の軌道を定める軌道作成部105と、を備える。
(もっと読む)
1 - 20 / 374
[ Back to top ]