
Fターム[5H004HB09]の内容
フィードバック制御一般 (10,654) | 検出量の種類 (1,307) | 加速度、角加速度、又はその高次微分 (44)
Fターム[5H004HB09]に分類される特許
1 - 20 / 44
アクチュエータの制御方法及びアクチュエータの制御装置
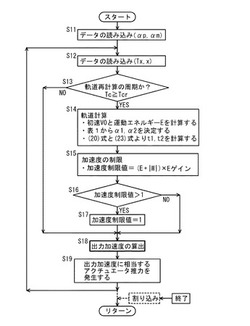
【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
規範応答演算装置およびそれを用いた車両用制駆動力制御装置

【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
センサ情報の統合方法と装置
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
多重系モータの制御装置及び移動体
【課題】積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供する。
【解決手段】本発明の一形態に係る多重系モータの制御装置は、速度指令と実速度との偏差に基づいて、多重系モータ51の一つの系をそれぞれ制御する、第1の制御系11と第2の制御系21とを備え、第1の制御系11は、多重系モータ51の一つの系をPI制御し、第2の制御系21は、多重系モータ51の他の一つの系をP制御する。これにより、積分制御器の出力が発散しない多重系モータの制御装置及び移動体を提供することができる。
(もっと読む)
アクティブフィードバック制御装置及びプログラム
【課題】制御の対象とする振動数領域の振動を低減するだけでなく、制御の対象としない振動数領域の振動も低減することができる。
【解決手段】アクティブフィードバック制御装置は、ゲインマージンW(s)の最大値が閾値γ以下で且つ振動量の増加量が最大となる最大振動増加量が閾値α以下の場合に、振動数領域における振動量Gc(s)の最大値を評価値とし、その他の場合に無限大を評価値とする予め定めた評価関数によりコントローラの制御特性を表すパラメータの制御性能を表す評価値を算出し、複数の組み合わせのパラメータについて算出した評価値に基づいて、複数の組み合わせのパラメータの中から評価値が最も小さいパラメータを設定する。
(もっと読む)
デジタルサーボアンプシステムおよびそのパラメータ調整方法
【課題】デジタル制御を用いたサーボアンプシステムにおいて、パラメータ調整を迅速に進めるとともにパラメータ調整データを保護する。
【解決手段】デジタルサーボアンプシステムは、ネットワーク経由でパラメータを調整するパラメータ調整装置140を有する。センサ201〜203の信号と目標指令とをデジタル信号に変換し、パラメータ調整装置が調整したパラメータを用いてデジタル制御信号をサーボアンプユニット120が生成する。サーボアンプユニットは、デジタル変換されたセンサ信号と指令信号とを比較演算して制御信号を生成するサーボ制御部222と、演算に使用するパラメータを管理するパラメータ管理装置227とを有する。パラメータ管理装置は、パラメータ調整装置からのパラメータ更新通知に基づいて記憶装置226に更新されたパラメータを書込んでいるときは、サーボ制御部が記憶装置へアクセスすることを禁止する。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の周波数を実際の周波数と異なる周波数であると誤認識した場合であっても疑似振動の周波数を制振すべき振動の周波数に合わせて適応制御アルゴリズムの適応性を向上させ、制振性および安定性を向上させた制振装置を提供する。
【解決手段】適応制御アルゴリズムを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、発生した相殺振動Vi4と振動Vi3との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて周波数認識手段31により認識された周波数を位相差が無くなる方向へ補正する周波数補正手段35とを有している。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動と基準波との間の位相ズレを低減して、適応フィルタの算出時における制振安定性を向上させるとともに、制御の応答性や制振効果を向上させた制振装置を提供する。
【解決手段】適応フィルタ32fを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて相殺振動Vi4を制振すべき位置に発生させる指令たる相殺信号を生成する。そして、振動Vi3と相殺振動Vi4との相殺誤差として検出された振動と適応フィルタ32fの基準波とに基づいて相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて適応フィルタ32fの基準波の位相を補正する。
(もっと読む)
PID制御装置及びPID制御方法
【課題】高速応答が求められる制御システムにおいて、PIDパラメータを自動設定する。
【解決手段】PID制御部11をP制御状態とし、目標値入力を一定とした状態で、オートチューニング部12はPID制御部11の比例ゲインKpを徐々に増大させる。Kpの増大に伴い、偏差に振動が発生する。FFT解析部13は偏差を周波数解析して振動の周波数を検出する。フィルタ14は偏差から振動周波数の成分を抽出しRMS処理部15に出力する。RMS処理部15は偏差の振動の1周期ごとに実効値を算出し、複数周期連続して増加していることを検出したときに、オートチューニング部12にトリガー信号を送出し、PID制御部11のKpの値を下げる。オートチューニング部12はトリガー信号を受信すると、そのときの比例ゲインKpc及び固有振動の周期TcからPIDパラメータを決定する。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
制御対象の制御入力決定手段
【課題】制御対象に入力する制御入力を生成する複数の制御関数の重みを自動的に決定する制御入力決定手段を提供する。
【解決手段】重みが設定された複数の制御関数を有する制御式を用い入力される車両4の制御入力決定手段2であり、価値決定手段6が有する価値部分空間情報に基づいて要求指令に対応する状態の価値と重みの関係データを求め、方針決定手段8で関係データから制御目的を達成する最適化重みを選択し、最適化手段10でその最適化重みを制御式に適用して制御入力を生成し、その制御入力により車両4を制御する。次に、状態抽出手段12でその制御後の車両4の状態を抽出する。価値更新手段14で車両4の制御前の状態と制御後の状態との変化に基づいて、価値部分空間情報の価値を更新する。さらに、評価手段16で制御後の状態と制御目的の目標値との差を求め、その差に基づいて価値更新手段14の価値の更新を補正する制御入力決定手段2。
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
車両
【課題】上り段差に到達する直前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させることによって、高速で上り段差に進入した場合でも常に安定した車両動作を維持し、段差がある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の上り段差に接触する前に、車両の加速度を増加させるとともに、車体の重心を段差の上段側に移動させる。
(もっと読む)
1 - 20 / 44
[ Back to top ]