
Fターム[5H004JB20]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 最適値の使用(平均値の使用を含む) (15)
Fターム[5H004JB20]に分類される特許
1 - 15 / 15
センサ情報の統合方法と装置
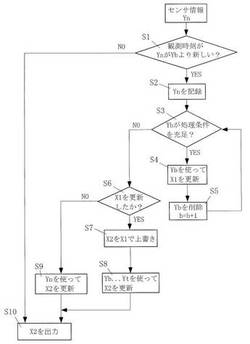
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
最適部分波形データ生成装置及び方法ならびにロープ状態判定装置及び方法

【課題】最適化された可変長の特徴部分波形集合を生成する最適部分波形データ生成装置を提供する。
【解決手段】最適部分波形データ生成装置は、波形データにおいて異常が疑わしい箇所付近の複数のピークを検出するピーク検出ユニットと、前記複数のピークから最良のピークを選択するピーク選択ユニットと、前記最良にピークについて複数の特徴部分波形を生成する部分波形生成ユニットと、遺伝的アルゴリズムを用いて前記複数の特徴部分波形を最適化することにより可変長の最適部分波形データを生成する最適化ユニットと、を具備する。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】 複数チャンネルを関連付けた制御において、特性が異なるチャンネルが存在する場合に、制御性能が悪化するのを回避する。
【解決手段】複数の各チャンネルのステップ応答波形を計測し(ステップn1)、複数の各チャンネルの最大傾きRの内の最大値を抽出し(ステップn2)、最大値の1/2を閾値として、複数のチャンネルを、最大傾きRでグループ分けできるか否か判定し(ステップn3)、グループ分けできるときには、複数チャンネルの内に特性の異なるチャンネルが存在するとして、最大傾きRが小さいグループのチャンネルの検出温度の平均温度を代表温度に変換し(ステップn4,5)、傾斜温度制御を行う。
(もっと読む)
制御装置及び制御方法
【課題】制御上の無駄時間が生じていたとしても、簡易な構成で、制御を開始してから制御対象を目標値に設定するまでの整定時間を短縮することができる制御装置及び制御方法を提供する。
【解決手段】制御装置は、第1の温度センサ2から検出された第1の値を取得する第1の取得部12と、第1の温度センサ2に比して制御対象物の近くに配置された第2の温度センサ3から検出された第2の値を取得する第2の取得部13と、前記第2の値と予め設定された目標値とを比較した比較結果に応じて、入力値を前記第1の値と前記第2の値とで切り替える切り替え部17と、目標値と入力値の偏差に基づいて前記制御対象物の状態を制御するPID制御部16と、を備える。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】ユーザの要求に応じて、高精度な均一制御と通常の制御とを可能にする。
【解決手段】制御対象2からの複数の検出温度を変換するモード変換器3の変換用の行列Gmと、PID制御部4−1〜4−3からの操作量を配分する前置補償器5の配分比の行列Gcとを切替えることにより、複数チャンネルに対応する複数の検出温度を、傾斜温度および代表温度に変換し、それらを制御量として複数チャンネルを関連付けて制御する第1の制御と、複数の検出温度をそのまま制御量としてチャンネル毎に制御する第2の制御とを、制御中に切替え可能としている。
(もっと読む)
鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法
【課題】1つの湯面レベルセンサーから得られる湯面変動から高精度に定在波変動分と体積変動分とを分離し、湯面定在波・湯面レベルを制御する、鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法を提供することを目的とする。
【解決手段】連続鋳造機の鋳型内の所定位置における湯面レベル変動の定在波変動分の定在波周波数を、鋳型幅から算出し、その周波数で定在波をsin関数とcos関数で記述して、その記述された定在波の係数を測定した湯面レベル変動からオンライン推定することにより、定在波変動分を求める。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
プロセスの状態類似事例検索方法、プロセスの状態予測方法及び制御方法
【課題】熱反応炉プロセスのようにデータにノイズの多いプロセスであっても、実用上十分な予測精度を得ることができる方法を提供すること。
【解決手段】プロセスの時系列データベースから過去のプロセスの状態類似事例を検索し、プロセスの将来状態を予測するにあたって、検索あるいは予測の前処理として、プロセスの時系列データのノイズを削減するノイズ削減ステップを備える。
(もっと読む)
予測装置、予測方法およびプロセス制御システム
【課題】次回の処理結果の予測精度を向上させ、プロセス状態の急激な変化に迅速に追随させて制御精度を向上させる。
【解決手段】測定値取得部13によって取得された測定値データ保存部11の処理結果の測定値と、予測値データ保存部12の予測値とを用いて、平滑化定数算出部14が指数加重移動平均モデルに適用させる平滑化定数が算出され、リセット判定部15によって測定値データ保存部11のデータの削除が判定されて、データを削除する場合は、リセット部16が測定値データ保存部11の最新の測定値以外のデータを削除し、データを削除しない場合は、予測値算出部17が指数加重移動平均モデルに平滑化定数と測定値とを適用して予測値を算出するようにする。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 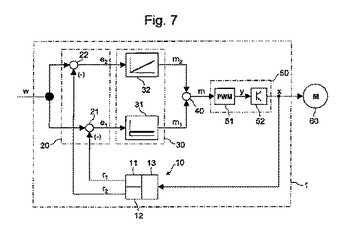 (もっと読む)
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】傾斜温度(温度差)を用いた温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じないようにすることを目的とする。
【解決手段】温度差である傾斜温度に基づいて、操作量を演算する傾斜モモードのコントローラCgと、平均温度に基づいて、操作量を演算する平均モードのコントローラCaとを備える温度調節器において、傾斜温度に基づいて、干渉を打ち消すように、傾斜モードおよび平均モードの各コントローラCg,Caの操作量を調整する傾斜モードおよび平均モードの非干渉化器Fg,Faを設けている。
(もっと読む)
予測式作成装置、結果予測装置、品質設計装置、予測式作成方法及び製品の製造方法
【課題】実績データが存在しない外挿域の予測精度を向上する、予測式作成装置、結果予測装置、品質設計装置、予測式作成方法及び製品の製造方法を提供することを目的とする。
【解決手段】製造条件とその結果を格納した実績データベース10の各サンプルと要求点との類似度を計算する類似度計算手段121と、該類似度を重みとした重み付き回帰により要求点近傍の予測式を作成する予測式作成手段122とを備える予測式作成装置12により、前記課題を解決でき、さらに、この予測式作成装置12により得られた予測式を用いて、特定した製造条件に基く結果予測、製造条件の制御、製品の品質設計を行うことができる。
(もっと読む)
時間加重移動平均フィルタ
プロセスに関連した状態を推定する方法は、プロセスに関連した状態観測値を受け取る。状態観測値は関連プロセス時間を有する。状態観測値を割り引く重み係数を、プロセス時間に基づいて生成する。状態推定値を、割り引かれた状態の観測値に基づいて生成する。システム(100)は、プロセス装置(120,140)、計測機器(130)、およびプロセス制御部(150)を有している。プロセス装置(120,140)は、操作レシピに従ってプロセスを行うように動作可能である。計測機器(130)は、プロセスに関連した状態観測値を生成するように動作可能である。プロセス制御部(150)は、関連プロセス時間を有する状態観測値を受け取り、状態観測値を割り引く重み係数をプロセス時間に基づいて生成し、状態推定値を割り引かれた状態の観測値に基づいて生成し、操作レシピの少なくとも1つのパラメータを状態推定値に基づいて決定するように動作可能である。  (もっと読む)
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
温度制御方法、温度制御装置およびループコントローラ
【課題】制御点数が増えた場合にも、高精度な傾斜温度制御を可能とする。
【解決手段】傾斜温度制御を行なう温度制御ブロック24H,24L−1,24L−2を階層化し、下層の温度制御ブロック24L−1,24L−2の入力温度モード変換ブロックからの平均温度GPV1を、上層の温度制御ブロック24Hの入力温度モード変換ブロック20Hの入力温度とする一方、上層の温度制御ブロック24Hの前置補償ブロック23Hからの制御出力を、下層の温度制御ブロック24L−1,24L−2の目標温度モード変換ブロック21L−1,21L−2の目標温度とし、これによって、下層の各温度制御ブロック24L−1,24L−2毎に、個別に傾斜温度制御するのではなく、両温度制御ブロック24L−1,24L−2全体として傾斜温度制御するようにしている。
(もっと読む)
1 - 15 / 15
[ Back to top ]