
Fターム[5H004KC12]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306) | 最適解演算 (55)
Fターム[5H004KC12]の下位に属するFターム
Fターム[5H004KC12]に分類される特許
1 - 20 / 25
ポンプ運転計画装置
【課題】ポンプの最適な運用を行う運転計画を立てることができるポンプ運転計画装置を提供する。
【解決手段】揚水ポンプ井から水を汲み上げる複数の揚水ポンプ2eの運転計画を立案するポンプ運転計画装置であって、目的関数fを設定し、時刻i(i=0,…,23)毎の揚水ポンプ井への流入量予測値Qin(i)と、揚水ポンプ井の初期水位H(0)と、揚水ポンプ井の断面積Sと、揚水ポンプ井の上限水位Hhighおよび下限水位Hlowとを用いて、動的計画法により目的関数fを満たす複数の揚水ポンプ2eによる時刻i(i=0,…,23)毎の揚水量Qout(i)を求める揚水量計画演算部11を備えるポンプ運転計画装置。
(もっと読む)
制御システム、制御装置、および制御方法

【課題】個別VQC方式を用いた電力系統の電圧値が運用制約範囲の上限および下限の少なくとも一方を超えることを低減する。
【解決手段】個別VQC装置401は、検出された500kV母線101の電圧値を用いて、電力系統10における目的関数の最適解を決定する。個別VQC装置401は、最適解を用いて個別電圧無効電力制御を行なう。個別VQC装置401は、通信インターフェイスを用いて最適解を全系VQC装置301に送信する。目的関数は、電力系統10における電圧に関する運用制約の範囲内の中間値に対する、最適解の解候補に応じた電力系統10の電圧値についての偏差を示した項を加算項として含む。
(もっと読む)
高度プロセス制御システム及び信頼指数を有する仮想測定による方法
【課題】R2RモデルでのVMのデータ品質を効果的に考量でき、R2R制御及び測定遅延のVMフィードバックループでの信頼度を考量できない問題を克服し、且つ、APC効能を向上させる方法を提供する。
【解決手段】APCシステムは、工程ツール100と、測定ツール110と、仮想測定(VM)モジュール120と、信頼指数(RI)モジュール122と、R2Rコントローラ130とを備える。工程ツールに使用される、複数の履歴ワークを処理するための複数組の履歴工程データを取得し、測定ツールによって履歴ワークの複数の履歴測定データを取得する。複数組の履歴工程データ及び履歴測定値を用いることによって、推定アルゴリズムに基づいて推定モデルを構築し、複数組の履歴工程データとそれらに対応する複数組の履歴測定値を用いて、参照モデルを構築する。R2Rコントローラは工程ツールを制御して、工程ランを実行させる他のステップを実行する。
(もっと読む)
連続システムをマルコフ決定過程に変換するための方法
【課題】最適な制御シーケンスをMDF及び連続状態空間システムについて見つけることができるように、所与の連続状態空間動的システムを離散状態空間を有するマルコフ決定過程(MDF)に変換する。
【解決手段】連続動的システムが、離散状態を有するマルコフ決定過程に変換される。連続システムの所定の数の連続状態が選択される。各連続状態は、MDPの1つの離散状態に対応する。ドローネ三角形分割が連続状態に適用されて、一組の三角形が作成される。各三角形の頂点は連続状態を表す。各離散状態について、次の離散状態y=f(x,a)が求められる。xは、その離散状態に対応する連続状態を表し、aは制御動作であり、fは、連続状態の非線形遷移関数である。次の離散状態yを含む特定の三角形が識別され、次の離散状態yは、その特定の三角形の頂点によって表された連続状態xに対応する離散状態に遷移する確率として表される。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
状態空間の探索方法および状態空間の探索装置
【課題】探索の効率化を図り、少ない処理時間でより良い状態を得ることができる状態空間の探索装置を提供する。
【解決手段】指定された着目状態から出発し、第1の距離を有する隣接状態の中から遷移する状態を決定して次の着目状態とすることを順次繰り返し、遷移する状態において最良の評価値を持つ状態から評価値の良い上位n個の評価値を持つ状態までを探索する第1の探索手段2と、評価値の良い上位n個までの評価値を持つ状態を各々初期の着目状態とし、第1の距離より小さい距離の第2の距離を有する隣接状態の中から遷移する状態を決定して次の着目状態とすることを順次繰り返すことにより、評価値の良い上位n個までの評価値を持つ状態を各々初期の着目状態とする各々の最良の評価値を持つ局所最良状態を探索する第2の探索手段4と、複数の局所最良状態の中から、最良の評価値を持つ状態を最良状態とする最良状態探索手段5とを備える。
(もっと読む)
技術システムの状態をコンピュータ支援のもとで探査する方法
本発明は技術システムの状態をコンピュータ支援のもとで探査する方法に関する。この方法によれば、技術システムのその時その時の状態において新しい状態へと導く行動を実行することにより、技術システムの状態が次々と走破される。探査中に状態と行動の大量のデータが実行されるとともに、例えば技術システムの損傷又は動作不良状態をもたらすかもしれない許容されない行動が行われないことを保証するために、安全性関数と復帰規則が使用される。本発明による方法によれば、技術システムに関する大量の状態と行動を集め、これらの状態と行動を技術システムの適切な調整を決める教示方法において使用することが可能である。本発明による方法は任意の技術システムに適用することができる。好ましい適用形態はガスタービンの状態の探査である。本方法は技術システムの実稼働時と技術システムの動作シミュレーション中の両方において使用できる。 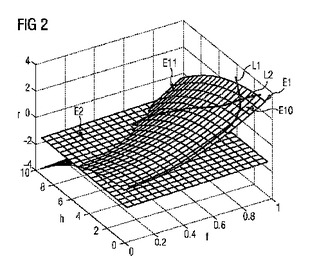 (もっと読む)
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定を早期に適切に終了する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。ここにおいて、i回目の前記比較において得られる誤差(誤差の二乗和:ja(i))の変化量に基づいて、パラメータの修正量(勾配ベクトルの各要素S(i))についての上下限値(±Smax)を設定する(ステップ20)。これによって、上下限値が逐次変更され、適切な制限を掛けることができる。
(もっと読む)
パラメータの同定装置およびそのプログラム
【課題】パラメータの同定が適切に行われたかを判定する。
【解決手段】非線形な物理モデルを用いてシミュレーションを行い、その出力と最適化対象の出力を比較し、その比較結果に基づき物理モデルのパラメータを繰り返し修正することにより、各パラメータを真値に漸近させていくパラメータの同定を行う。パラメータを変化させた時の出力評価関数値の変化量について、比較して強い相関の組み合わせがあるかを全てのパラメータ同士の出力評価関数値の変化量について判定する(ステップ12,13)。強く相関の組み合わせがある場合に物理モデルまたは最適化対象の出力が物理パラメータを真値に漸近させるための十分な情報を含んでいないと、判断する(ステップ14)。
(もっと読む)
自動適合装置及び方法
【課題】効率的且つ効果的に適合値を決定する。
【解決手段】自動適合システム100において、次善最適解決定処理が実行される。当該処理においては、パラメータx1及びx2に応じて変化する目的関数F1及び制約関数F2相互間のパレート解が、適合範囲内のパラメータ値について導出され、目的関数F1及び制約関数F2により規定される座標平面上で、パレート解に対応する座標点を繋げて得られるパレート解曲線PRF_Pが設定される。一方、当該適合範囲でパラメータを変化させた場合の、目的関数F1及び制約関数F2各々における最大値と最小値との偏差DOPT及びDLIMに基づいて規定される傾きkに、更にエンジン200の定常比率Aに応じて定まる補正係数αを乗じてなる傾きk’の直線が設定される。この直線とパレート解曲線との接点に対応するパレート解が、次善的な最適解として抽出される。
(もっと読む)
複数入力/出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法
【課題】 複数入力及び/又は出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法を提供する。
【解決手段】 複数の入力及び出力制約を有する複数入力複数出力(MIMO)システム(208)を動的に制御するための方法であって、本方法が備えられる。本方法は、入力及び出力制約が無い状態でシステム(208)の複数の制御参照入力の閉ループトラッキングを実装するようにMIMOトラッキングコントローラ(202)を構成する段階と、複数の制御参照入力に適用される参照修正値を生成することによってMIMOシステム(208)の入力及び出力制約を実現するようにMIMO制約コントローラ(210)を構成する段階とを含む。
(もっと読む)
制御マップ最適化装置
【課題】制御対象の特性に依拠せず制御マップの最適化を行うことが可能な汎用的な制御マップ最適化装置を提供する。
【解決手段】制御マップ最適化装置1は、入力された引数x、yに対応する格子点(xi,yj)に設定された制御パラメータPi,jまたは引数x、yに対応するマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jから補間により算出した制御パラメータPEを出力する制御マップMと、制御パラメータが取るべき値に関する情報Qと出力された制御パラメータPEとに基づいて制御マップMの制御パラメータPi,jの最適化を行う最適化手段3とを備え、最適化手段3は、最急降下法により情報Qと制御パラメータPEとから作成された単峰性関数の誤差関数Errorに基づいて制御マップMにおけるマップ位置(xE,yE)の近傍の格子点に設定された制御パラメータPi,jの値を更新し、この更新処理を繰り返す。
(もっと読む)
コントローラ
少なくとも部分的な自律性をもって、センサ測定データに基づきシステムの状態を完全に判断することが不可能である環境におけるシステムの状態を示す複数のセンサから受け取られた測定データに基づいて、前記システムを制御するように動作するコントローラが提供される。前記コントローラは、前記システムの動的進化のための確率の少なくとも1つの集合と、前記システムの前記複数のセンサのための対応する測定モデルとを定義するシステムモデルと、前記センサから測定データを受け取り、前記システムモデルを参照して、それぞれが前記システムの状態を表す複数のサンプルを生成するように動作する確率論的な推定器と、前記システムの考えられる状態を表す複数の考えられるサンプルのそれぞれについて、前記システムで実施される動作を定義する情報を定義する前記システムモデルに対応する規則集合と、前記確率論的な推定器の出力を受け取り、前記規則集合を参照して、前記システムで実行される1つ以上の対応する動作を定義する情報を選択するように動作する動作セレクタとを備える。 (もっと読む)
閉ループ制御のチューニングの自動化
本発明は閉ループシステムのためのフィルタとループ比例ゲインを同時選択するための新規な装置、方法およびシステムに関するものである。本発明の1つの典型的な実施形態によれば、速度ループ補償器として知られるコントローラの一部を自動的に選択する方法が提供される。この方法は速度制御(例えばモータエンコーダ角)のフィードバックに使用されるセンサへの作動力(例えばモータトルク)からのダイナミック応答を表す周波数応答関数(FRF)に作用する。この周波数応答関数はそれぞれ対応する周波数値をもつ複素数の列として表すことができる。このチューニング方法は、安定余裕に関して規定された一連の基準を満たしつつループ比例ゲイン(Kp)の最大化を可能にするフィルタパラメータの組み合わせを決定する。積分ゲインと参照モデルを選択する方法も提示される。 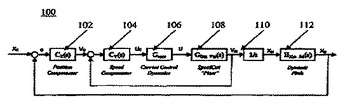 (もっと読む)
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
プラントの制御装置及びプラントの制御方法
【課題】本発明はプラントの制御を行う複数の操作端の動作速度にばらつきがある場合でもプラントを良好に制御できるプラントの制御装置を提供することにある。
【解決手段】本発明のプラント制御装置は、プラントの制御特性を模擬するモデルと、プラントに対する操作信号を演算する操作信号生成部と、制御パラメータを含む制御ロジックデータを保存する制御ロジックデータベースと、プラントを操作する操作端の操作端仕様データを保存する操作端仕様データベースと、過去の操作信号を保存する操作信号データベースと、過去の計測信号を保存する計測信号データベースと、学習パラメータの初期値の決定と学習パラメータを更新する機能を持つ学習条件決定部と、学習パラメータの制限値を拘束条件としてモデルを用いてプラントの操作方法を学習する学習部と、学習した学習情報データを保存する学習情報データベースを備えるように構成した。
(もっと読む)
プロセス制御システム
【課題】一定値制御という実現容易な制御系の枠組みの中で、トレードオフ関係にある複数個の変量をバランスさせ、エネルギーコスト削減と水質の向上というトレードオフを考慮した制御を可能にする。
【解決手段】トレードオフ関係を持つDO濃度と、アンモニア濃度に対し、トレードオフのバランス点を指定する1つの関数を作成して、関数定義手段3に設定し、この関数に基づき、関数変換手段4によって、プロセス状態計測手段2で計測されたDO濃度、アンモニア濃度を関数変換させるとともに、余剰汚泥流量一定値制御手段6によって、プロセス状態計測手段2の出力が目標値供給手段5で設定された一定値となるように、制御指令を出力する。
(もっと読む)
システムの最適制御方法
【課題】従来の理論では、解析的に最適制御則を導くことが困難であった非線形最適制御問題に対して、見通しの良い最適制御則を得るプロセスを明らかにすること.
【解決手段】入力に関する評価関数を制御装置から制御対象に伝達されるエネルギとし,これに制御性能を表現する関数を加えて全体の評価関数とする.さらに付帯条件として制御対象の完全なパワー収支の式を加えて汎関数とする.こうすると汎関数は制御変数に関して1次式となるので,制御対象が線形,非線形を問わず汎関数を最小化する条件から微分方程式を解かずに最適制御則を解析的に導くことができる.これにより、従来解析的に最適制御則を求めることが難しかったエネルギ回生制御や非ホロノミック拘束を有する非線形制御問題に対しても最適制御則を求めることができるようになった.
(もっと読む)
解の開始推定が実行不可能かつ一貫性のない二次計画法において、効力をもつ制約の良好な開始推定を利用するシステムおよび方法
【課題】初期推定(xf)が実行不可能な場合であっても、開始時に問題を緩和しないアルゴリズムが提供される。
【解決手段】従来の方法のかわりに、このアルゴリズムでは、有効制約集合の初期推定を使用して、問題を緩和せずにEQPを解く。この最初のEQPの解が最適ではないが実行可能な場合、これを実行可能な点の推定として使用することができる。これは、初期有効制約集合と一貫性のある実行可能な点であるという利点を有するが、従来の方法で使用される初期推定は、必ずしもそうではない。
(もっと読む)
ディジタルサーボ制御装置及びレーザ加工装置
【課題】 DA変換器を用いたディジタルサーボ制御装置において、電流制御回路内部の電流偏差信号に重畳するスパイク状の脈動を抑えて、低電圧で安価な電源回路を用いても従来と同等以上の制御性能を有するディジタルサーボ制御装置を提供する。
【解決手段】DA変換器5が出力するアナログ信号S5に作用する1次ローパスフィルタ4と、1次ローパスフィルタ4に起因する位相遅れを補償する安定化補償手段とを設け、1次ローパスフィルタ4の出力信号を電流指令信号S4として電流制御回路3に入力する。1次ローパスフィルタ4はサンプリング周期の逆数で決まるサンプリング周波数よりも低い折点周波数を有するローパスフィルタとする。1次ローパスフィルタ4に代えて、サンプリング周期の逆数で決まるサンプリング周波数に等しい遮断周波数、又はサンプリング周期の逆数の1/2で決まるナイキスト周波数の整数倍に等しい遮断周波数を有するノッチフィルタとすることができる。
(もっと読む)
1 - 20 / 25
[ Back to top ]