
Fターム[5H004LA15]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 複数の制御対象を有するもの (37)
Fターム[5H004LA15]の下位に属するFターム
制御対象を切り換えるもの (3)
Fターム[5H004LA15]に分類される特許
1 - 20 / 34
機器相互間の省エネ装置
【課題】異なる工業単位のエネルギーを扱う複数機器を共通評価基準にて省エネ評価でき、設備全体としての省エネを図ることのできる機器相互間の省エネ装置を提供する。
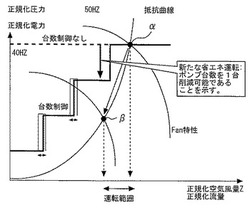
【解決手段】それぞれ異なる工業次元のエネルギーを設備に供給する複数の機器を備える。前記複数の機器それぞれに関し、運転量とその運転量に応じて設備に供給するエネルギー量との関係を定めた運転特性について定格を1として正規化し、正規化された運転特性を重畳し、機器相互間の関係を表す重畳正規化データを求める。前記重畳正規化データに基づいて、前記複数の機器のうち1の機器について省エネ制御を実施した場合に他の機器に与える相互干渉度を、最適化手法により計測・分析する。前記相互干渉度に基づいて、前記設備全体としての大局的な最適解を算出する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、この必要出力から各制御アクチュエータの使用電力の総和である使用電力総量を算出し、割当総電力に対する使用電力総量の達成率と最大限度時間に対する昇温時間の確保率とのバランスを表す重み付け評価関数の評価値を最適にする必要出力の組み合わせを探索して、最終的に得られた必要出力を各制御ループの操作量出力上限値として設定する電力抑制部(16〜19)と、制御ループ毎に設けられた制御部(22−i)とを備える。
(もっと読む)
干渉力補償制御装置
【課題】可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】複数の制御系に関し、定常状態においてエネルギー使用量が指定された一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、複数の制御ループのヒータの電力使用量を規定する割当総電力の情報を受信する割当総電力入力部(10)と、各制御ループの消費電力値を取得する電力値取得部(11)と、消費電力値から各制御ループの電力余裕を算出し、電力余裕の総和に対する各制御ループの電力余裕の比率と割当総電力に基づいて各制御ループの操作量出力上限値を算出する電力抑制部(12〜18)と、制御ループ毎に設けられ、操作量を算出し、操作量の上限処理を実行して上限処理後の操作量を対応する制御ループのヒータに出力する制御部(19−i)とを備える。
(もっと読む)
産業プラントの運転制御システム
【課題】生産量の急変や製品種の変更に対して、その時点で精度の高い需要用役量予測を行い、その予測によって無駄なく必要な用役を供給し、省エネとCO2削減を行うことを目的とする。
【解決手段】生産設備に必要な用役を供給する用役設備を制御するための指令値を作成するプラント運転監視制御システムにおいて、生産設備で生産される被生産物に与えられるべき時間経過に対する物性値を定めた製造処方と、被生産物の生産開始時刻、生産終了時刻生産量および生産開始時刻から生産終了時刻の間に生産される被生産物の生産量を定めた生産計画に基づいて、時刻経過に対して被生産物を生産するにあたり必要十分な用役の需要量を示した用役需要量パターンを生成する。このように得られた用役需要量パターンを用いて、用役設備に対する指令値を算出し用役設備を制御することを特徴とする。
(もっと読む)
給湯システム
【課題】給湯待機時に給湯運転が可能な状態で待機する給湯器を2台以上にしても出湯が遅れない給湯システムを提供する。
【解決手段】並列に接続された複数の給湯器1の運転台数をシステムコントローラ2によって制御する給湯システムであって、各給湯器1が流量制御弁11と流量センサ12とを備え、給湯待機時に2台以上の給湯器1が通水可能状態で待機するものにおいて、通水可能とされた給湯器1のうち、少なくとも1台の給湯器の単位時間当たりの通水量が、給湯器の最低作動通水量未満の領域に設定された所定流量以上であり、かつ、その積算通水量Aが所定値X1になると、他の通水可能な給湯器1の通水量を減少させて一つの給湯器に通水を集中させ、当該給湯器が早期に給湯運転を開始するようにする。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
工場の稼働システムおよび稼働方法
【課題】圧縮空気を消費する複数の生産設備を有する工場に対して、不測の圧力低下を未然に防止し、省エネルギで安定稼働することができる工場の稼働システムを提供する。
【解決手段】工場の稼働システム100は、(a)各生産設備の消費流量の時系列データと各生産設備のタクトタイムとを記憶しているデータベース113と、(b)各生産設備の消費流量の時系列データと各生産設備のタクトタイムとを使用して総消費流量の時系列変化をシミュレートした結果から、総消費流量が閾値以下になる区間の中で最大となる最大稼働有効区間と、最大稼働有効区間において各生産設備の最初と最後のタクト開始時間とを特定する設備稼働スケジュール決定部114と、(c)生産設備105〜107のいずれかを、最初のタクト開始時間で稼働開始させ、最後のタクト開始時間で稼働停止させることを最大稼働有効区間の周期で繰り返し行う設備稼働制御部115とを備える。
(もっと読む)
自走式移動体の制御システム
【課題】実時間制御において、複合的な目的を達成するとともに作業時間を短縮することが可能な自走式移動体の制御システムを提供する。
【解決手段】自走式掃除機100の制御システム1は、変位可能な本体110と、本体110に取り付けられ、本体110に対して変位可能なアーム120と、本体110を駆動するための車輪駆動用モータユニット133と、アーム120を駆動するための第1のサーボ127と第2のサーボ128と、コンピュータ200とを備え、コンピュータ200は、本体110の変位に関する因子とアーム120の変位に関する因子との両方の因子に基づいて本体110の挙動とアーム120の挙動とを評価する評価関数を利用して、本体110の挙動とアーム120の挙動とを制御するように車輪駆動用モータユニット133と第1のサーボ127と第2のサーボ128とを最適制御する。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、複数のゾーンZ1,Z2のうち予め規定されたゾーンの制御の整定状態を検出したときに、整定時の各ゾーンZ1,Z2の操作量MV1,MV2と整定時の操作量総和MV_allとの比に応じて、予め規定された操作量総和下限値OL_allを各ゾーンに配分し、この配分した値を各ゾーンの操作量下限値OL1,OL2とする下限値配分部32−1,32−2とを備える。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1と、操作量差δMVの絶対値が規定値Δを超える場合に操作量差δMVの絶対値が小さくなるように、ゾーンZ1に出力する操作量MV1を変更する操作量変更部32−1とを備える。
(もっと読む)
制御装置および制御方法
【課題】制御量を設定値に近づける特性を完全に犠牲にしてしまうことは避けつつ、過渡状態、整定状態に関係なくエネルギー消費量を抑制する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2との操作量差δMVを算出する操作量差算出部31−1,31−2と、操作量差δMVに基づいて設定値SP1,SP2に対するSP補正量ΔSP1,ΔSP2を算出するSP補正量算出部32−1,32−2とを備える。SP補正量算出部32−1,32−2は、操作量MV1のエネルギー効率が悪い場合にエネルギー効率が良い方向へ変化するようにSP補正量ΔSP1,ΔSP2を算出する。
(もっと読む)
制御装置
【課題】偏差が小さな領域における制御応答性を向上させることができる制御装置を提供する。
【解決手段】偏差が0<偏差<閾値記憶部11の閾値となる領域では、固定値記憶部13に記憶された固定値がランプ関数発生器18を介して加算器5に供給されるので、一般的な制御方法に比べて目標値により急速に収束することになる。そして、偏差が閾値記憶部15に記憶された固定値<偏差<0となる領域、すなわち、目標値を超えた領域においても、固定値記憶部17に記憶された固定値がランプ関数発生器18を介して加算器5に供給されるので、一般的な制御方法に比べて目標値により急速に収束することになる。すなわち、偏差が小さな領域でのゲインが高くなり、応答性が向上する。
(もっと読む)
プラント運転システム
【課題】
複数の入力項目と複数の出力項目を有するプラントを対象として、トレードオフの関係にある出力項目の値を考慮した操作量を迅速に決定できるプラント運転システムを提供する。
【解決手段】
複数のプラントの出力項目のそれぞれについて出力許容範囲を設定する出力許容範囲設定部82と、全ての出力項目の値が出力許容範囲設定用図形86で設定した出力許容範囲内となるプラントの操作項目の操作量の組合せである許容操作量を求める許容操作量取得部52と、許容操作量の値、又は許容操作量の値の存在範囲を画面に表示する許容操作量表示部54と、許容操作量に対応する出力項目の値を画面にグラフ表示する出力項目グラフ表示部56と、を備えた。
(もっと読む)
PIDパラメータ調整方法および調整装置
【課題】互いに類似した複数の制御対象を個別に制御する制御ループの各PIDパラメータを短時間に効率的に設定することのできるPIDパラメータ調整方法を提供する。
【解決手段】互いに類似した複数の制御対象を個別に制御する制御ループの中の代表的な1つの制御ループを指定してオートチューニングを実行させ、該制御ループのPIDパラメータを決定すると共に、オートチューニングが未実行の制御ループに、前記オートチューニングの実行によって求められたPIDパラメータをそのまま流用して設定する。
(もっと読む)
制御装置および温度調節器
【課題】制御部が制御する制御対象の特性と制御部が想定する制御対象との特性を一致させることにより、高精度な制御を可能にする。
【解決手段】制御対象を一次遅れ系として制御するPID制御部3と、制御対象2の分布定数系の特性を一次遅れ系の特性に変換する変換部4とを備えており、変換部4では、制御対象2の分布定数系のモデルの逆モデル5によって制御対象2の分布定数系の特性を打ち消す一方、制御対象2の一次遅れ系のモデル6に置き換えており、これによって、PID制御3は、制御対象2、制御対象2の分布定数系のモデルの逆モデル5、および、制御対象2の一次遅れ系のモデル6からなる一次遅れ系の拡大制御対象7を制御する。
(もっと読む)
制御方法、温度制御方法、制御装置および温度調節器
【課題】 複数チャンネルを関連付けた制御において、特性が異なるチャンネルが存在する場合に、制御性能が悪化するのを回避する。
【解決手段】複数の各チャンネルのステップ応答波形を計測し(ステップn1)、複数の各チャンネルの最大傾きRの内の最大値を抽出し(ステップn2)、最大値の1/2を閾値として、複数のチャンネルを、最大傾きRでグループ分けできるか否か判定し(ステップn3)、グループ分けできるときには、複数チャンネルの内に特性の異なるチャンネルが存在するとして、最大傾きRが小さいグループのチャンネルの検出温度の平均温度を代表温度に変換し(ステップn4,5)、傾斜温度制御を行う。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】傾斜温度(温度差)を用いた温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じないようにすることを目的とする。
【解決手段】温度差である傾斜温度に基づいて、操作量を演算する傾斜モモードのコントローラCgと、平均温度に基づいて、操作量を演算する平均モードのコントローラCaとを備える温度調節器において、傾斜温度に基づいて、干渉を打ち消すように、傾斜モードおよび平均モードの各コントローラCg,Caの操作量を調整する傾斜モードおよび平均モードの非干渉化器Fg,Faを設けている。
(もっと読む)
発電プラントの運転最適化方法及び装置
【課題】複数のタービンを備える発電プラントにおいて、最も発電効率が高くなるように各タービンの負荷配分を制御する運転最適化方法を提供する。
【解決手段】発電プラントにおける制約条件を満たしつつ、最も高い発電効率を得る最適化制御に際して、発電プラントのモデル式から最適解を得るためのステップを、リプシッツ最適化アルゴリズムを用いるステップと、そのステップで得られた初期解を用いて逐次2次計画法を用いるステップとの2段階のステップを設け、初期解に依存して発生する局所的最適解による運転を防止する。
(もっと読む)
1 - 20 / 34
[ Back to top ]