
Fターム[5H004LB09]の内容
フィードバック制御一般 (10,654) | 切り換え (165) | 円滑な切り換えを行うもの (42)
Fターム[5H004LB09]に分類される特許
1 - 20 / 42
PID制御装置
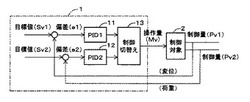
【課題】2系統のPID制御の切替えを可能にしたPID制御装置において、制御対象からの制御量にノイズが含まれていても、切替えを行う際に目標値の変更だけで制御対象でショックが発生しないようにする。
【解決手段】第1PID演算部11で変位の制御量Pv1と目標値Sv1との偏差e1によりPID演算し、演算結果を制御切替え部13に出力する。第2PID演算部12で荷重の制御量Pv2と目標値Sv2との偏差e2によりPID演算し、演算結果を制御切替え部13に出力する。PID演算アルゴリズムの過程で、微分項Dnと比例項Pnを除いた積分項TnのみでMvtの値を演算し、Mvtをメモリに逐次記憶する。切替え時に、Mvtを操作量として制御対象2に出力する。
(もっと読む)
アクチュエータの制御方法及びアクチュエータの制御装置

【課題】最短時間制御にフィードバック制御の要素を取り入れると共に、制御終了後に制御出力を収束できるアクチュエータの制御方法及び制御装置を提供する。
【解決手段】最短時間制御を用いると共に、制御力の最大出力時の最大加速度αpと最大減速度αmを用いて、加速出力から減速出力へ切り替える切替時刻t1と、減速出力の終了時刻t2を算出し、計算時刻t0から切替時刻t1までは、アクチュエータの制御力を最大加速出力とし、切替時刻t1から終了時刻t2まではアクチュエータの制御力を最大減速出力とし、終了時刻t2では制御力の出力を終了すると共に、予め設定した時間毎に切替時刻t1と終了時刻t2を繰り返して算出して更新し、更に、制御系が持つ残り仕事と運動エネルギーの和である残留エネルギーの減少と共に、制御出力を小さくする。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
制御装置及び制御方法
【課題】一方の測定器から他方の測定器へ切り替えられた場合においても、測定値を突然変化させることなく熱間圧延装置の制御を適切に継続する。
【解決手段】第1のプロセス値として測定するマルチゲージ123(第1の測定部)と、第2のプロセス値として測定する平坦度計127(第2の測定部)と、マルチゲージ123(第1の測定部)の異常を検出する異常検出部12と、プロセス情報を記憶するプロセス情報記憶部2と、第2のプロセス値を補正するための学習項Zを算出する学習項算出部13と、学習項Zを記憶する学習項記憶部3と、補正板幅値(補正プロセス値)を生成する補正部14と、異常が検出された時点以前における第1のプロセス値と、異常が検出された時点以降における補正板幅値(補正プロセス値)とを選択する選択部15と、選択されたプロセス値及び補正プロセス値に基づいて、圧延ラインの制御を行う機器制御部16とを備える。
(もっと読む)
初期化操作方法
【課題】目標操作量まで滑らかに変化するように接続できるとともに応答性を改善し得る初期化操作方法を提供する。
【解決手段】積分器3からの出力が比例成分項を含む多項式で表わされる制御器1を用いて制御を開始する際、その時点での目標値rと制御量yとの差である制御偏差を無くすようにする初期化操作方法であって、初期化時に、多項式の内、少なくとも1つの比例成分項を積分バイアス量xbとして分離し、独立した式として設定することを特徴とする。
(もっと読む)
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
プロセス制御システム
【課題】分散型制御装置による制御からに多変数モデル予測制御装置による制御への切り替えを、1制御周期の欠落もなく実行することができるプロセス制御システムを実現する。
【解決手段】プロセス出力値を共通に入力する分散型制御装置と多変数モデル予測制御装置とを、双方のステータス変更操作により切り替える機能を有し、分散型制御装置が稼動するスタンドバイモードのステータスから多変数モデル予測制御装置が稼動するコントロールモードのステータスに切り替える際に、多変数モデル予測制御装置は、所定の制御周期で分散型制御装置と多変数モデル予測制御装置に設定されているステータスの読み込み処理と、双方のステータスをコントロールモードに一致させるステータス等値化処理と、プロセスの制御演算処理と、演算結果を分散型制御装置側に渡す書き込み処理とを制御周期の期間中に少なくとも1回の追加ステータス等値化処理を実行する。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の制御器で用いるパラメータを決定するパラメータ決定装置13であって、異なる特徴を有する複数の演算式の組み合わせからなるとともに、異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式の重み付けを切り替え前の制御器の状態に応じて決定し、決定した重み付けが与えられたパラメータ算出演算式を用いて切替後の制御器におけるパラメータを決定する。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
制御装置、移動体、制御方法、及びプログラム
【課題】複数のフィードバック補償器を有し、これらを順次切り換える制御系において、切り換え時の過渡応答の特性を向上させるようにする。
【解決手段】切換以降の過渡応答、制御入力の振幅、制御入力の差分値、及び切換直前と直後の制御入力の差分値を抑制する評価関数を設計し、この評価関数を最小化する倒立2輪走行用フィードバック補償器60の状態ベクトルの初期値を与える。これによって、制御切換後の過渡応答や、制御入力の振幅、不連続性を向上させることができる。
(もっと読む)
自動操舵装置及び方法
【課題】無駄な舵取り量の発生を抑えて省エネルギーの効果を高めることができる自動操舵装置及び方法を提供する。
【解決手段】予め設定されたバッチ区間B1,B2毎に船体運動モデル及び制御ゲインを更新しつつ、バッチ区間よりも短い制御周期毎に針路偏差を解消し得る命令舵角を求めて航走体の針路を自動制御する自動操舵装置及び方法であって、バッチ区間B1からバッチ区間B2に切り替わる直前のバッチ終了期間T1内における針路偏差及び命令舵角を記憶し、バッチ区間B1からバッチ区間B2に切り替わったときに、船体運動モデル及び制御ゲインを更新するとともに、記憶した針路偏差及び命令舵角と更新した船体運動モデルとを用いて状態変数を更新し、更新した制御ゲインと更新した状態変数とを用いて新たなバッチ区間B2における命令舵角を求める。
(もっと読む)
制御装置及び通信管理方法
【課題】通信異常発生時、プロセスデータを取得できるまでの遅延時間を短縮できるよう
にすると共に、分散型制御システムにおける制御動作の安定化を実現できるようにする。
【解決手段】2つの通信バスα及びβに接続され、バス切り換え機能を有して通信バスを
監視し、当該通信バスの一時異常及び正常を判別するCPU10と、通信バスを介してC
PU10に接続され、フィールド機器から入力したプロセスデータを通信バスを介してC
PU10に出力すると共に、通信バスを介して当該CPU10から入力した制御データを
フィールド機器に出力する1つ以上のIOM部14等とを備え、CPU10は、一方の通
信バスの状態が一時異常であると判別したとき、一時異常と判別された通信バスから正常
な状態の通信バスにIOM部14等の接続を切り換えるものである。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の前記制御器で用いるパラメータを決定するパラメータ決定装置であって、異なる特徴を有する複数の演算式の組み合わせからなり、該異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式を用いることにより、切替後の制御器において使用されるパラメータを決定する。
(もっと読む)
制御装置および制御方法
【課題】ガス燃焼炉と電気炉のハイブリッド型熱処理炉についてガスモードから電気モードに早く確実に切り換える。
【解決手段】制御装置は、追従フェーズへ切り換える第1のフェーズ切換部3と、収束フェーズへ切り換える第2のフェーズ切換部4と、安定フェーズへ切り換える第3のフェーズ切換部5と、追従フェーズの操作量を出力する第1の操作量決定部6と、収束フェーズの操作量を出力する第2の操作量決定部7と、安定フェーズの操作量を出力する第3の操作量決定部8と、ハイブリッド型熱処理炉をガス燃焼炉として動作させる操作手段に第1の操作量決定部6からの操作量を出力するガスモード操作量出力部9と、ハイブリッド型熱処理炉を電気炉として動作させる操作手段に第2、第3の操作量決定部7,8からの操作量を出力する電気モード操作量出力部10とを備える。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、操作量総和MV_allが予め規定された操作量総和下限値に到達してこの下限値以下になったときに、操作量MV1,MV2を、到達が生じた時点の操作量MV1,MV2に基づく値に固定する操作量固定部32−1,32−2とを備える。
(もっと読む)
プラント制御装置及び方法
【課題】複数の操作対象を個別に手動操作できると共に、操作対象へ出力される操作量の突変を防止するトラッキングを廃止してコストを低減できること。
【解決手段】プラントのプロセス値PVと制御設定値SVとの制御偏差eを入力し、操作弁A、Bに対する操作量偏差ΔMVを演算する速度型PID制御手段13と、この速度型PID制御手段からの操作量偏差を各操作弁側へ切り換えて出力する切換手段14と、各操作弁に対応して複数設けられ、操作弁の制御モードに基づき、切換手段から出力された操作量偏差を積分して算出した操作量MV−A、MV−B、及び手動設定された値に基づく操作量MV−A、MV−Bのいずれか一方を、対応する操作弁へ出力する積分機能付手動操作手段15、16と、各操作弁の制御モード及び各操作弁へ出力される操作量に基づき、切換手段の動作を制御する切換制御手段19とを有する。
(もっと読む)
1 - 20 / 42
[ Back to top ]