
Fターム[5H115PA01]の内容
車両の電気的な推進・制動 (204,712) | 目的 (11,912) | 乗り心地改善 (2,285)
Fターム[5H115PA01]の下位に属するFターム
ノッチの切換回数減少 (6)
Fターム[5H115PA01]に分類される特許
161 - 180 / 2,279
ハイブリッド車両の駆動装置
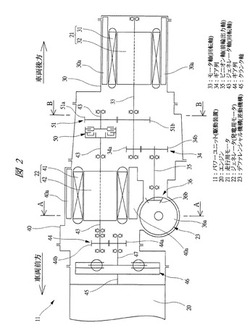
【課題】パワーユニットの搭載性を高めつつ、発電用モータの設計自由度を高める。
【解決手段】パワーユニット11の後端には走行用モータ21が設けられ、走行用モータ21からの動力は、モータ軸33からギア列34およびピニオン軸35を経てデファレンシャル機構23に伝達される。また、パワーユニット11の前端にはエンジン20が設けられ、パワーユニット11の中央にはジェネレータ22が設けられる。エンジン20とジェネレータ22とはギア列44を介して連結され、ジェネレータ軸43はクランク軸45よりも上方に配置される。これにより、ジェネレータ22の下方にスペースを確保することができ、ジェネレータ22の下方にピニオン軸35を配置することができるため、パワーユニット11の幅寸法を抑制することが可能となる。さらに、ジェネレータ22の下方にスペースが確保されるため、ジェネレータ22の設計自由度を高めることも可能となる。
(もっと読む)
車両用駆動装置

【課題】簡単な構造で、それぞれの操舵輪をそれぞれに対応したモーターで駆動することができる車両用駆動装置を提供すること。
【解決手段】車両用駆動装置1は、モーター700のシャフト701と連結される等速ジョイント900を回転可能に支持するハブユニット800と、モーター700を支持し、かつ車両2とハブユニット800との間に配置される緩衝装置400に取り付けられる第1のナックル200と、第1のナックル200に対して、所定の揺動中心軸Zsの周りに揺動できるように第1のナックル200に支持され、かつハブユニット800を支持する第2のナックル300と、を有し、第2のナックル300の揺動中心軸上に、等速ジョイント900の揺動中心Cが配置される。
(もっと読む)
複合ブレーキの制動力協調制御装置
【課題】目標制動力に対する回生制動力の不足分を補うように摩擦制動力を電動倍力制御により調整するときに、制動操作力フィーリングが悪化することのないようにする。
【解決手段】コントローラ3はインバータ5による制御下でモータ3を駆動して車輪1を駆動させるが、演算部16から回生制動トルク指令Tがある時は、発電負荷をモータ2に与えて車輪1を回生制動する。車輪1には、ブレーキペダル11に応動する電動倍力式マスターシリンダ12からの液圧によって摩擦制動力も付与され、この摩擦制動力は回生制動力との協調により目標制動力Ttotalを実現するよう、サーボモータ13を介したシリンダ12の電動倍力制御により調整する。この調整に際し、回生制動力実行値T*の代わりに、これを演算処理部17でフィルタ処理して得られたものを協調制御用回生制動トルクtTとし、減算器18で求めた(Ttotal−tT)をサーボモータ13への摩擦制動力指令Tfとする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 ハイブリッド車両に設けられるモータのアシスト機能及び回生機能を利用して、圧縮着火運転モードと火花点火運転モードの切換頻度を抑制することができるハイブリッド車両の制御装置を提供する。
【解決手段】 圧縮着火運転モード(動作点P0)において、要求運転モードが火花点火運転モードに変化したとき(Pdmd)は、エンジン要求トルクTQENGdmdをHCCI上側トルクTQhcciHiに設定する(P1)とともに、モータ要求トルクTQMOTdmdを、要求トルクTQdmdとエンジン要求トルクTQENGdmdの差分(TQdmd−TQENGdmd)に設定し、圧縮着火運転モードを維持する。
(もっと読む)
車両の制御装置
【課題】走行抵抗が急低下したとき、加速度の急変を抑えつつ、ドライバの意図に合致した駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】電気自動車1は、アクセル開度センサ7と、走行抵抗演算部12と、走行抵抗急低下判断部14aと、単調増加変数演算部13cと、電子コントロールユニット5と、を備えた。走行抵抗演算部12は、車両走行中、外乱による走行抵抗推定値FDを検出する。走行抵抗急低下判断部14aは、車両走行中、走行抵抗の急低下を検出する。単調増加変数演算部13cは、走行抵抗の急低下を検出したとき、アクセル開度に基づいて車両駆動力の単調増加変数を設定する。電子コントロールユニット5は、単調増加変数と走行抵抗推定値FDに基づいて目標車両駆動力を設定し、タイヤへ加える駆動力抑制により、実車両駆動力を前記目標車両駆動力に収束させる制御を行う。
(もっと読む)
駆動制御装置
【課題】 車両の走行状態に応じて適切に旋回することができる駆動制御装置を提供すること。
【解決手段】 第1規範ヨーレイト算出手段8a4によって、横加速度センサ32で検出された加速度に応じて第1規範ヨーレイトが算出され、第2規範ヨーレイト算出手段8a5によって、横加速度推定手段8a3で推定した加速度に応じて第2規範ヨーレイトが算出される。横加速度推定手段8a3は、操舵角と走行速度に基づいて加速度を推定する。走行速度と操舵角とに応じて規範ヨーレイト選択手段8a6によって選択された規範ヨーレイトと走行速度とに基づいて、基準差回転算出手段8a7によって基準差回転が算出される。制御手段8a1によって、実差回転と基準差回転との偏差に応じて差回転設定機構Tを制御する。
(もっと読む)
ハイブリッド自動車およびその制御方法
【課題】内燃機関を運転している最中に走行モードを切り替えたときに生じ得る内燃機関の運転ポイントの急変を抑制する。
【解決手段】エンジンを運転して走行している最中に走行モードが切り替えられたときには、レートリミット処理により充放電要求パワーPb*を緩変化させて設定する(S750〜S800)。そして、充放電要求パワーPb*と走行用パワーとの和としてエンジン要求パワーを設定し、エンジン要求パワーを動作ラインに適用して得られる運転ポイントでエンジンが運転されると共に走行用パワーで走行するようエンジンと二つのモータとを制御する。充放電要求パワーPb*が緩変化することにより、エンジン要求パワーも緩変化するから、エンジンの運転ポイントの急変を抑制することができる。
(もっと読む)
車両用電動モータのトルク応答制御装置
【課題】車両の加速度感が、運転状況の変化に応じた要求加速度に近いものとなるよう、電動モータのトルク応答制御装置を提供する。
【解決手段】車速VSPが低いときはトルク応答決定係数Kを小さくしてモータトルク応答を低応答にし、車速VSPが高くなるにつれトルク応答決定係数Kを大きくしてモータトルク応答を高応答にする。これにより低車速で要求されるデリケートな運転操作を容易に行うことができ、高車速でトルク上昇が速くなり、高車速で要求される加速度感を満足させることができる。アクセル開度APOが小さい小負荷時は、トルク応答決定係数Kを小さくしてモータトルク応答を低応答にし、大負荷になるほど、トルク応答決定係数Kを大きくしてモータトルク応答を高応答にする。これにより低負荷で要求されるデリケートな運転操作を容易に行うことができ、大負荷でトルク上昇が速くなり、大負荷で要求される加速度感を満足させることができる。
(もっと読む)
駆動制御装置
【課題】変速時に電動機と駆動輪との間に設けられたクラッチが無駄に動作することを抑制可能な駆動制御装置を提供する。
【解決手段】MG3と駆動輪24との間の動力伝達経路中に設けられたMGクラッチ30を備え、内燃機関2と駆動輪24との間に設けられた変速機10の動作を制御することにより複数の変速段に変速可能な駆動装置1Aに適用される駆動制御装置において、ニュートラル位置Nを含むシフトパターンを移動可能に設けられたシフトレバー51を有するシフト操作装置50を備え、シフトレバー51がニュートラル位置Nにあっても駆動装置1Aに対して運転者から変速が要求されていると判定した場合にはMGクラッチ30が解放状態に切り替わることを禁止する。
(もっと読む)
車両の駆動制御装置
【課題】モータ・ジェネレータの切り離しの前後で運転者が覚える違和感を抑制することができる車両の駆動制御装置を提供する。
【解決手段】車両制御装置40は、車両1Aの車速が第1閾値以上の場合に、モータ・ジェネレータ3と差動機構25等の駆動部との間の動力伝達が遮断されるようにMGクラッチ30を制御し、回生制御の実行時に、車速が第1閾値よりも小さい値の第2閾値を超えてから1閾値へ近づくに従ってモータ・ジェネレータの回生トルクが低減するようにモータ・ジェネレータ3を制御する。
(もっと読む)
ハイブリッド車両のアクセルペダル踏力制御装置
【課題】車両の加速性を確保する。
【解決手段】モータジェネレータ2のみを駆動して車両を走行するEVモードからエンジン1を駆動するHEV走行モードに切り替わるアクセル開度である第1アクセル開度を設定し、アクセル開度が第1アクセル開度を越えて大きくなると、アクセルペダル32の踏力をベース踏力よりも増加させる。第1アクセル開度は、バッテリ9のSOCが低くなるほど小さくなるよう設定されと共に、平坦路一定速釣り合い開度となるアクセル開度に基づいた第2アクセル開度で規定される下限値が設定されている。これによって、アクセルペダル32を一定以上踏み込むことが可能となり、車両の加速性を確保することができる。
(もっと読む)
モータ駆動装置及びモータ駆動車両
【課題】トルク制御と速度制御の切り換えタイミングと、クラッチの接続/分離タイミングとの不一致の問題に対処するためのモータ制御技術を提供する。
【解決手段】モータ駆動装置が、上位トルク指令に応答して第1トルク指令を生成するトルク制御手段と、上位速度指令と3相モータのロータ回転数とに応答して第2トルク指令を生成する速度制御手段と、第1トルク指令と第2トルク指令のいずれかから選択された選択トルク指令に応答してインバータを制御するインバータ制御手段と、クラッチを接続状態と分離状態の間で切り替えるクラッチ制御手段とを備えている。選択トルク指令は、クラッチの切り替えに対応して第1トルク指令と第2トルク指令のいずれかから選択される。トルク制御手段は、ロータ回転数の絶対値が所定の速度制限値を超えた場合、第1トルク指令の絶対値が上位トルク指令の絶対値より小さくなるように第1トルク指令を生成する。
(もっと読む)
変速操作機構
【課題】運転者が操作するレバーやスイッチを配置するために必要なスペースを拡大させることなく車両を電動機で走行させるシフトレンジを追加することが可能な変速操作機構を提供する。
【解決手段】内燃機関の動力で走行するエンジン走行モードと、モータ・ジェネレータ(MG)の動力が走行するMG走行モードと、ニュートラルモードとに動力伝達状態を切り替えることが可能な車両に適用される変速操作機構において、ニュートラル位置N、1速〜5速、及びリバースRを含むシフトパターンを移動可能に設けたシフトレバー51を有し、かつそのシフトパターンにおいてシフトレバー51が移動可能なセレクト経路52とシフト経路53とが交差する位置のうちニュートラル位置N以外の位置にMG走行モードに対応するMG走行位置EVが設定されたシフト操作装置50と、シフトレバー51をMG走行位置EVに保持することが可能なディテント機構とを備えている。
(もっと読む)
車両の駆動装置
【課題】機械要素の部品点数の増加を抑えつつ、カム部材の接触に伴う衝撃を緩和できる車両の駆動装置を提供する。
【解決手段】駆動装置2は、内燃機関3及び第1モータ・ジェネレータ4が駆動源として動力伝達経路内に設けられるとともに、第1モータ・ジェネレータ4のトルクが伝達され得る連結部材21をケース17に対して係合させる係合状態と、その係合を解放する解放状態との間で切り替え可能な係合機構30を備え、解放状態のときに内燃機関3を停止すべき場合、係合機構30のカム部材を滑らせつつ内燃機関3の回転数が0に至るように駆動部32を制御する。
(もっと読む)
蓄電装置の制御装置およびそれを搭載する車両
【課題】車載の蓄電装置の充放電制御において、ドライバビリティを損なうことなく、蓄電装置の電圧が使用可能領域外となることを抑制して蓄電装置の劣化を防止するとともに、蓄電装置の充放電性能を十分に引出すことを可能にする。
【解決手段】ECU300は、負荷装置20へ電源を供給するための蓄電装置110の充放電電力を制御する。ECU300は、負荷装置20の動作状態に基づいて、充放電電力の変化速度を設定するように構成された電力変化速度設定部340と、蓄電装置110の電圧の変化速度を演算するように構成された電圧変化速度演算部310と、充放電電力の変化速度および蓄電装置110の電圧の変化速度に基づいて、充放電電力を制限するための制限値を設定する制限値設定部380とを備える。
(もっと読む)
車両用駆動制御装置
【課題】ハイブリッド車両において、モータ走行からエンジン走行に切り替える際、電動モータ17にトルクアップする十分な余裕がない場合でも、当該切替時のトルクショックを抑制できるようにする。
【解決手段】走行モードの切替においては、停止したエンジン11の膨張行程にある気筒に供給された燃料を点火・燃焼させることによって該エンジン11を始動させる。電動モータ17が現在出力可能な最大トルクと現在の発生トルクと差である余裕トルクを演算する。断続手段121を作動させて車輪14からエンジン11にアシストトルクを付与する際に、電動モータ17の余裕トルク量に応じてエンジン回転数上昇手段18によるエンジン回転数の上昇を実行するとともに、電動モータ17のトルクアップを実行する。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】異音の発生および燃費の悪化を抑制する。
【解決手段】エンジンECUは、第2MGに対するトルク指令値Tm=0であると判定した場合(S100にてYES)、第1MGの回転数の変化量ΔNgを算出するステップ(S102)と、エンジンの目標エンジン回転数および目標トルクを決定するステップ(S104)と、第2MGに対するトルク指令値Tm≠0であると判定した場合(S100にてNO)、予め定められた動作線を用いてエンジンの目標エンジン回転数および目標トルクを決定するステップ(S108)と、決定された目標エンジン回転数および目標トルクに基づいてエンジンを制御するステップ(S106)とを含む、プログラムを実行する。
(もっと読む)
電磁ブレーキの制御装置および同装置を搭載した荷役車両
【課題】車両停止時、電磁ブレーキの作動回数が減ることにより、電磁ブレーキの作動音による運転者の不快感を低減できると共に、車両発進時、スムーズな発進感覚を提供できる電磁ブレーキの制御装置の提供。
【解決手段】荷役車両に搭載され、ブレーキペダルを踏み込むと制動状態より解放される電磁ブレーキの制御装置であって、その制動条件を、車両速度が発生している時における第1の制動条件と、発生していない時における第2の制動条件とからなるものとし、第1の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両速度が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとし、さらに、第2の制動条件を、ブレーキペダルが踏み込まれている否かのほか、車両動作量が規定値を超えるものか否かにより電磁ブレーキを制動状態とするか解放するか制御するものとする。
(もっと読む)
車両用駆動制御装置
【課題】ハイブリッド車両において、モータ走行からエンジン走行に切り替える際、電動モータ17にトルクアップする余裕がない場合でも、当該切替時のトルクショックを抑制できるようにする。
【解決手段】停止したエンジン11の膨張行程にある気筒に供給された燃料を点火・燃焼させることによって該エンジン11を始動させる。電動モータ17が現在出力可能な最大トルクと現在の発生トルクと差である余裕トルクを演算する。余裕トルクが所定値よりも小さいときには、エンジン回転数が、車速及び変速比に応じた同期回転数より所定回転数以上に上昇したときに、エンジン11と車輪14とを動力が伝達されるように断続手段で締結とするとともに、電動モータ17のトルクダウン制御を実行する
(もっと読む)
車両用駆動装置の制御装置及び制御方法
【課題】奇数段が奇数段軸に固着した状態のままその後段の偶数段で車両が走行しても駆動源が故障しないよう制御する。
【解決手段】電動機に接続され第1断接手段を介して内燃機関に接続される第1入力軸と、第2断接手段を介して内燃機関に接続される第2入力軸と、被駆動部に動力を出力する出力軸と、第1入力軸上に配置され第1同期装置を介して第1入力軸に連結される複数の奇数段ギヤよりなる第1ギヤ群と、第2入力軸上に配置され第2同期装置を介して第2入力軸に連結される複数の偶数段ギヤよりなる第2ギヤ群と、出力軸上に配置され第1ギヤ群の奇数段ギヤと第2ギヤ群の偶数段ギヤとが噛合する複数のギヤよりなる第3ギヤ群とを有する変速機を備えた車両用駆動装置の制御装置は、車両が第2入力軸及び第2ギヤ群を介した内燃機関からの動力による走行中、第1同期装置と第1入力軸の係合状態の切り換えが不可能な状態のときは、後段への変速を禁止した変速マップを用いる。
(もっと読む)
161 - 180 / 2,279
[ Back to top ]