
Fターム[5H115PG06]の内容
車両の電気的な推進・制動 (204,712) | 車両の種類 (12,614) | 電気自動車(ハイブリッド車を含む) (11,291) | 電動車椅子 (106)
Fターム[5H115PG06]に分類される特許
21 - 40 / 106
車両
【課題】車体の降車方向傾斜確率を算出し、その値によって車体の傾斜方向を予測するとともに、転倒防止装置の実行を禁止する禁止手段を備え、降車方向への車体傾斜を予測した場合には転倒防止装置の実行をあらかじめ禁止状態にしておくことにより、車体傾斜方向の予測に基づく的確な判断で必要な場合にのみ確実に転倒防止装置を作動させることができ、転倒防止装置の不要な作動によって使用者が余分な時間と費用を要することがなく、かつ、車体固定式片側ストッパのみで十分な安全性を保障可能な倒立型の車両を実現することができるようにする。
【解決手段】車両制御装置は、車体の姿勢の制御の停止時に車体が傾斜する方向を予測する傾斜方向予測手段と、傾斜方向予測手段が予測した車体が傾斜する方向に基づいて転倒防止装置の実行を禁止する禁止手段とを備える。
(もっと読む)
電動車椅子

【課題】電動車椅子において、壁面との間隔を自動的に一定に保つ制御を行うことが出来る装置を提供する。
【解決手段】電動車椅子において、距離センサ2を単体で用い測定した距離の測定値に対応するアナログ信号電圧と、設定したい距離に対応する参照電圧の差を、増幅器3に入れることで、自動的に両者の差がゼロになるように駆動輪5、6が差動回転し、車椅子の方向制御により、壁面1からの距離を一定に保って、移動することを可能にする新しい自動制御回路を用いる。
(もっと読む)
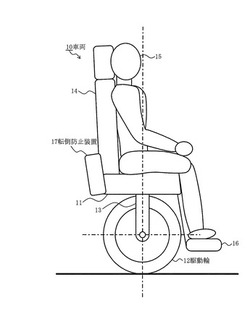
車両
【課題】乗員や搭載物等の状態に依らず、いつ倒立制御を停止しても車体を安定した状態に維持することを可能とし、異常時における緊急停止や乗員による降車要求に即時に対応することができ、使い勝手がよく、かつ、安全に使用することができるようにする。
【解決手段】車両制御装置は、車両の重心位置及び/又は重心高さを取得する車両重心取得手段と、車両重心取得手段によって取得された車両重心に応じて、姿勢制限手段の位置及び/又は形状を制御する姿勢制限制御手段とを備える。
(もっと読む)
車両
【課題】センサの計測値を取得することができない場合には、駆動輪の回転状態及び駆動トルクから車体の傾斜状態を推定することによって、車体傾斜状態を取得することができない状況下であっても倒立姿勢での走行を維持することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記駆動輪12の回転状態及び前記駆動トルクによって前記車体の傾斜角を推定する傾斜推定手段を備える。
(もっと読む)
電動車
【課題】運転者が発進スイッチ12をONにするとインホイール・モータ9が適度に駆動して走行を開始させるようにすることにより、発進時に車体が不安定になったり登り坂で車両が後退するようなおそれのない電動車を提供する。
【解決手段】運転者が足で踏んで回転させるペダル6と、このペダル6の回転速度を検出する回転速度検出器10と、この回転速度検出器10が検出したペダル6の回転速度に応じて、後輪2を駆動するためのインホイール・モータ9を駆動制御する回転ペダル駆動制御手段16とを備えた電動車において、運転者がONに操作する発進スイッチ12と、この12がONの場合に、インホイール・モータ9を低速で定速回転するように駆動制御する発進スイッチ駆動制御手段17とを備えた構成とする。
(もっと読む)
移動体
【課題】高い操作性を有する移動体を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる全方位車輪6と、車輪6を駆動する駆動モータと、搭乗席の搭乗面に加わる力に応じた計測信号を出力する力センサ9と、車台13に対して搭乗席8をヨー軸周りに回転可能に支持する支持台14と、支持台14のヨー軸周りの回転角を検出するために設けられたエンコーダ14aと、力センサ及びエンコーダ14aからの出力に応じて、車輪6を回転させるための指令値を駆動モータ603に出力する制御計算部51を備えるものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13に対して、回転可能に設けられた2以上の車輪6と、車輪6を駆動する駆動モータ603と、搭乗席8の搭乗面に加わる力に応じた計測信号を出力する力センサ9と、2以上の車輪6の中で空転している空転車輪を検出する空転検出部53と、力センサ9からの検出信号に応じた指令値を駆動モータ603に出力する制御計算部51であって、空転検出部53で検出された空転車輪の回転を停止させるともに、空転車輪以外の車輪がその場停止するように制御する制御計算部51と、を備えるものである。
(もっと読む)
移動体
【課題】高い操作性を有する移動体を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者の体重移動に応じて移動する移動体であって、搭乗者が搭乗する搭乗席8と、搭乗者を搭乗席8の所定の位置に規定する搭乗者位置規定部20、21と、搭乗席8を支持する本体部13と、本体部13を移動させる移動機構6と、搭乗席8の搭乗面に加わる力に応じた計測値を出力するセンサ9と、センサ9からの出力に応じて、移動機構6を駆動するための指令値を算出する制御計算部51と、を備えたものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者の体重移動に応じて移動する移動体であって、搭乗者の大腿部の下方が空間となる座面を有する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面8aに加わる力に応じた計測値を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、を備えたものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の搭乗面に加わる力に応じた計測値を出力する力センサ9と、力センサ9からの計測値に基づいて、ヨー軸周りのモーメントに応じた入力値を算出するセンサ処理部53と、入力値の絶対値に応じた移動速度で、入力値の符号に応じて前方又は後方に移動するように車輪6を駆動するための指令値を出力する制御計算部51と、を備え、搭乗者が前傾姿勢になって前進を入力する時と後傾姿勢になって後退を入力する時とで計測値の絶対値が同じ場合に、前進入力時の場合の計測値の絶対値が後退入力時の入力値の絶対値よりも大きくなっているものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面に加わる力に応じた計測信号を出力する力センサ9と、計測信号に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、搭乗席8をヨー軸周りに回転するヨー軸機構501と、ヨー軸機構をロール軸周りに回転するロール軸機構503と、ヨー軸機構501をピッチ軸周りに回転するピッチ軸機構502と、を備えるものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席の座面に加わる力に応じて、ヨー軸周りのモーメント、ピッチ軸周りのモーメント、及びロール軸周りのモーメントに対応する計測信号を出力するセンサと、ピッチ軸周りのモーメントに基づいて、並進成分を算出する並進成分算出部55と、ロール軸周りのモーメントに基づいて、旋回成分を算出する旋回成分算出部54と、ヨー軸周りのモーメントに基づいて、その場旋回成分を算出するその場旋回成分算出部56と、並進成分と旋回成分とその場旋回成分とを合成して、移動機構を駆動するための指令値を算出する合成部57、を備えるものである。
(もっと読む)
モータ駆動用電源装置
【課題】 誘起電圧が低いモータの低速時においても回生電流を回収することができ、且つ、取り出したエネルギを殆ど再利用することができるモータ駆動用電源装置を提供すること。
【解決手段】 主バッテリと、補助バッテリと、主バッテリからの電力をモータに供給して駆動するドライバと、補助バッテリに対して直列又は並列に接続された大容量コンデンサと、補助バッテリに電流を供給して充電するとともに大容量コンデンサに電流を供給して蓄電する充電手段と、主バッテリからの電力をドライバを介してモータに供給する「力行」とモータからの電気エネルギを回収する「回生」との切換を制御するとともに「回生」においてモータの速度が十分に早い場合には上記ドライバを介して主バッテリに回生電流を流しモータの速度が遅くなった場合には充電手段を介して大容量コンデンサに回生電流を流すように制御する制御手段と、具備したもの。
(もっと読む)
二輪自動車
【課題】 加減速時の応答性を向上させることができる二輪自動車を提供する。
【解決手段】 二輪自動車1は、車体2と、この車体2の左右両側に同軸上に配置された車輪3A,3B(車輪3Bは不図示)とを備え、車両重心Gが車輪3A,3Bの中心Sよりも下方に位置している。車体2には、車輪3A,3Bをそれぞれ回転駆動させる2つの駆動モータと、通常時には路面Rに接地されない前補助輪8及び後補助輪10と、この前補助輪8及び後補助輪10を上下方向に移動させる補助輪接地モータ11,12とが設けられている。また、二輪自動車1は、アクセル開度センサの検出値に基づいて、急加速時には後補助輪10を下方に移動させて路面Rに接地させるように補助輪接地モータ12を制御し、急減速時には前補助輪8を下方に移動させて路面Rに接地させるように補助輪接地モータ11を制御するECUを有している。
(もっと読む)
電動車両
【課題】路面が左右に傾いている場合でも安定して走行することができる電動車両を提供する。
【解決手段】電動車両1は、ジョイント部8により回動可能な前フレーム9A,9B及び後フレーム7A,7Bを有するフレーム体2を備えている。前フレーム9A,9Bの下端部には、モータ10A,10Bにより回転駆動される前輪3A,3Bが設けられ、後フレーム7A,7Bの下端部には、モータにより回転駆動される後輪4A,4Bが設けられている。ジョイント部8には、後フレーム7A,7Bを前フレーム9A,9Bに対して回動させるモータ12A,12Bが設けられている。また、電動車両1は、路面に対するフレーム体2のロール姿勢状態を推定し、フレーム体2のロール姿勢が目標ロール姿勢となるようにジョイントモータ12A,12Bを制御するコントローラを備えている。
(もっと読む)
車両及び車両の走行方向の変更方法
【課題】 小スペースで旋回することができる車両を提供する。
【解決手段】 少なくとも左右に一対配置される複数の車輪21,22と、走行すべく車輪21,22を回転させるための一つの駆動手段31とを備える車両において、車輪21,22間に回転速度差が発生することにより走行方向を変更すべく、少なくとも左右一対の車輪21,22を制動可能で、且つ当該各車輪21,22の回転速度を個別に調整可能に構成される方向変更手段4を備えることを特徴とする。
(もっと読む)
車両
【課題】段差抵抗トルクの推定値の履歴に基づいて、段差計測センサによる段差の計測値を補正し、また、その異常状態も検出することによって、段差計測センサをより有効に利用することを可能にし、段差のある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、車体に回転可能に取り付けられた駆動輪と、路面の段差を計測する段差計測センサと、駆動輪に付与する駆動トルクを制御して駆動輪と車体の姿勢を制御する車両制御装置とを有し、車両制御装置は、段差を昇降するときに、段差による抵抗である段差抵抗トルクを推定する段差抵抗トルク推定手段を備え、段差抵抗トルクの推定値に基づいて段差計測センサによる段差の計測値を較正する。
(もっと読む)
移動体駆動装置
【課題】一定速走行中における操作者の負担を軽減し、快適に移動体を駆動することができるようにする。
【解決手段】車速マップ記憶部34には、操作者の手が把持部20に載せられたときに力センサ22によって計測された重力方向の荷重と標準速度とが対応し、かつ、重力方向の荷重が大きくなるに従って、車速が速くなるように定められた重力方向の荷重と車速との関係を示す車速マップが記憶されている。操作者の手を把持部20に載せた状態で、操作者側から把持部20に荷重を作用させると、力センサ22によって、把持部20に作用する重力方向の荷重を計測する。そして、速度変換部40によって、車速マップに基づいて、力センサ22によって計測された重力方向の荷重を車速に変換し、駆動制御部42によって、速度変換部40によって変換された速度で電動車椅子10が移動するように、駆動部16を制御する。
(もっと読む)
車両
【課題】段差を昇降する前に、車体を段差の下段側に傾けるとともに、能動重量部を段差の上段側に移動させることによって、高い段差も安全に昇降することができ、段差のある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、前後方向に移動可能に前記車体に取り付けられた能動重量部と、前記駆動輪12に付与する駆動トルクを制御するとともに、前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の段差を昇降する前に、前記車体を段差の下段側に傾けるとともに、段差の上段側に前記能動重量部を移動させる。
(もっと読む)
走行車両
【課題】 搭載部を移動させることにより従来のバランサとしての機能を保持すると共に、搭載部前方のスペースの確保をすることができる走行車両を提供する。
【解決手段】 車体2と、車体2の進行方向に対して前後に移動可能に取り付けられる搭載部3と、搭載部3と車体2との相対位置を制御する移動手段7と、搭載部3の車体2に対する移動方向を案内する案内手段6と、車体2に回転可能に支持された車輪5と、を備えた走行車両1において、移動手段7は、搭載部3に対して固定された第1部材7aと、車体2に固定され第1部材7aに沿って相対移動する第2部材7bとを有し、案内手段6は、搭載部3に対して固定された第3部材6aと、車体2に固定され第3部材6aに沿って相対移動する第4部材6bとを有し、第1部材7a及び第2部材7b、並びに、第3部材6a及び第4部材6bの前端部7a1,7b1,6a1,6b1は、搭載部3の前端部3a1より車体2の前後方向における後側に配置されることを特徴とする。
(もっと読む)
21 - 40 / 106
[ Back to top ]