
Fターム[5H115QI04]の内容
車両の電気的な推進・制動 (204,712) | 制動、停止 (3,697) | 制動の種類 (3,172) | 電気制動 (2,522) | 回生制動 (2,356)
Fターム[5H115QI04]に分類される特許
201 - 220 / 2,356
充電プラン生成装置及び充電プラン生成方法
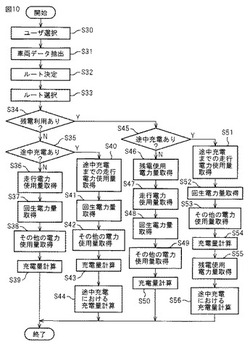
【課題】走行ルート終了後に、バッテリに残っている電力量を家電製品等に利用することを考慮した上で、過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を演算するステップと、予想使用電力量及び走行後の電力利用量(T)に基づいてバッテリに充電を行うための充電プランを生成するステップと、予想使用電力量及び走行後の電力利用量に基づいてバッテリに充電を行うための充電プランを生成するステップを有することを特徴とする充電プラン生成方法、及び従前プラン生成装置(100)。
(もっと読む)
電動車両駆動用モータの出力制御装置および出力制御方法

【課題】ロータセンサの取り付け誤差を検出して、センサ信号を補正し、補正されたセンサ信号に基づいてモータのステータコイルに対する通電制御の精度を向上させる。
【解決手段】ブラシレスモータ(1)に設けられるロータセンサ(5)のセンサ信号に基づいてモータの通電タイミングを制御する。モータ(1)を回生駆動させ、このときに生じる誘起電圧のゼロクロス点を検出するとともに、センサ信号の立ち上がりを検出する。ゼロクロス点に対するセンサ信号の立ち上がり位置の位相ずれを各ロータセンサに関して検出し、検出された位相ずれの平均値を算出する。記憶されている位相ずれの平均値を利用してセンサ信号の立ち上がり位置を補正し、補正されたセンサ信号に基づいてモータ(1)に対する通電タイミングを制御する。位相ずれの検出と記憶は完成車検査工程で行われる。
(もっと読む)
電動車両の制御装置
【課題】回生協調制御による電費向上効果を最大限に生かしつつ、限界領域に近い走行シーンにおいて車両挙動の安定性を確保すること。
【解決手段】電動車両の制御装置は、回生協調ブレーキ制御手段としてモータコントローラ21およびブレーキコントローラ10と、舵角補正ステアリング制御手段として4WASコントローラ22と、車両挙動制御手段として車両コントローラ9と、を備える。車両コントローラ9は、回生協調ブレーキ制御時、車両挙動の乱れを補償するように、舵角補正ステアリング制御により舵角補正をした後、依然として車両挙動が不安定であると判断されたとき(図4のステップS6でNO)、回生協調ブレーキ制御による回生トルクを低下させる制御を行う(図4のステップS7,S8)。
(もっと読む)
電気自動車の制動制御方法
【課題】モータによる回生制動が不可なモータまたはバッテリーの過温時や変速段がN段に操作される場合で回生制動量の急激な減少及び油圧制動装置の油圧応答遅延にて発生する制動力減少を効果的に解消できる電気自動車の制動制御方法を提供する。
【解決手段】本発明の電気自動車の制動制御方法は、回生制動が行われる状態で変速レバーのN段操作を検出する段階と、変速レバーのN段操作を検出した時点からモータの回生制動量を線形的に減少させると同時に、制動量の補償のために油圧制動装置の油圧制動量を増加させる段階と、N段操作の検出時から設定時間が経過すると、変速機のN段変速が行われるようにする段階と、を含む。
(もっと読む)
列車制御装置
【課題】実際の列車運行に適合したブレーキ制御を実行し、列車のブレーキ動作遅れ時間を短縮し、列車停止時間の短縮を図り、運転時隔の短縮に寄与し得る列車制御装置を提供すること。
【解決手段】 速度検出器20と、車上装置4と、ブレーキ装置3とを含む構成であって、速度検出器20は、列車2に搭載され、列車速度を検出する。車上装置4は、速度検出器20から供給される速度信号と、力行条件信号Bの有無とを入力条件にして、惰行走行を検知する。そして、惰行走行が検知されたとき、予備ブレーキ信号Cを生成し、ブレーキ装置3に、予備ブレーキ制御を与える。
(もっと読む)
車両の旋回状態制御装置
【課題】車両特性が変化したときも所定の操舵応答を実現し続け得るよう、駆動力補正量を修正する技術を提供する。
【解決手段】演算部21は、モータトルク目標補正量ΔTmを求め、観測部22は、このΔTm、操舵角θ、車速V、車輪速Vw、横加速度Gyおよびヨーレートφをモニタし、これら観測値を、記憶部23へ格納する。演算部24は、記憶部23内の横加速度Gyが、目標横加速度tGyから乖離するとき、所定の操舵応答に対応したモータトルク必要補正量tΔTmおよびモータトルク目標補正量ΔTmから修正トルクゲインGain=(tΔTm/ΔTm)を求め、修正部26はモータトルク目標補正量ΔTmを、ΔTm×Gainにより修正し、目標モータトルク演算部28は、演算部27からの要求モータトルクrTmを修正後のモータトルク目標補正量(ΔTm←ΔTm×Gain)だけ補正して目標モータトルクtTmとなす。
(もっと読む)
充電プラン生成装置及び充電プラン生成方法
【課題】走行ルートに必要な電力量を自宅以外における充電を考慮した上で、過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両(200)の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を走行ルートにおける途中充電量を考慮して演算するステップと、バッテリに予想使用電力量が充電されるような充電プランを生成するステップを有する充電プラン生成方法、及び充電プラン生成装置(100)。
(もっと読む)
電動機制御システム、発電機制御システム、及び電動発電機制御システム
【課題】モータジェネレータ2を効率の高い領域で動作させ、効率を向上させる。
【解決手段】駆動発電制御システム1の駆動発電制御ユニット8には、モータジェネレータ2の効率に基づいて設定された回転数Nと目標トルクTcとに対応する発生トルクTpが記憶される。発生トルクTpは、効率の高い運転領域又は当該運転領域の近傍のトルクである。駆動発電制御ユニット8は、回転数Nと目標トルクTcとに対応する発生トルクTpを決定して、発生トルクTpに対する目標トルクTcの割合に応じて、モータジェネレータ2が発生トルクTpを連続的又は間欠的に発生するように動作させる。これにより、モータジェネレータ2は、発生トルクTpを連続的又は間欠的に発生して車両の走行又は制動に必要な目標トルクTcをプロペラシャフト14に供給する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂シーンで車両がずり下がる際、バッテリの過充電を防止しつつ、回生による車両のずり下がりを抑制すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン3と、発電機5,6と、バッテリ8と、駆動機10,11と、ダイレクト配電制御手段(図2)と、車両ずり下がり対応制御手段(図7)と、を備える。ダイレクト配電制御手段(図2)は、発電機5,6が発電した実発電電力を過不足なく駆動機10,11の駆動電力として消費するように、駆動要求に応じて発電電力を制御する。車両ずり下がり対応制御手段(図7)は、ダイレクト配電による発電制御中、駆動トルク指令値の符号が反転せずに駆動回転数の符号が反転したとき、駆動機10,11を回生させる制御を行うとともに、発電機5,6を力行させる制御を行う。
(もっと読む)
交流電動機の制御システム
【課題】矩形波制御の適用時に交流電動機に制御外乱が生じても、過電流や過電圧の発生を防止する。
【解決手段】矩形波制御によって制御された交流電動機の運転領域が、低回転速度領域を含む所定領域330内である場合には、回転速度の急変が発生したときに、電流位相による制御モード切換判定を行うことなく、矩形波制御からPWM制御へ制御モードが切換えられる。一方、交流電動機の運転領域が、所定領域330外である場合には、電流位相に基づいて、矩形波制御からPWM制御へ制御モードを切換えるか否かが判定される。
(もっと読む)
車両用駆動装置
【課題】電動機側と車輪側との動力伝達の応答遅れを抑制可能な車両用駆動装置を提供する。
【解決手段】後輪駆動装置1は、車両の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪との動力伝達経路上に設けられ、解放又は締結することにより電動機側と車輪側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bと油圧ブレーキ60A、60Bとを制御するECUと、電動機2A、2Bと車輪との動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられ、電動機側の順方向の回転動力が車輪側に入力されるときに係合状態となるとともに電動機側の逆方向の回転動力が車輪側に入力されるときに非係合状態となり、車輪側の順方向の回転動力が電動機側に入力されるときに非係合状態となるとともに車輪側の逆方向の回転動力が電動機側に入力されるときに係合状態となる一方向クラッチ50を備える。
(もっと読む)
車両用動力伝達装置用制御装置
【課題】差動機構を高回転化から保護しつつエンジントルク低下を補うことが可能な車両用動力伝達装置用制御装置を提供する。
【解決手段】許容回転速度設定手段96は、所定の加速操作量OPAC及びエンジン回転速度Neのときにエンジン14から出力されるエンジントルクTeが、エンジン14の出力トルク特性を示す予め設定された関係から上記所定の加速操作量OPAC及びエンジン回転速度Neに基づいて定まる基準エンジントルクTesよりも低いと判断された場合には、そうでない場合と比較して、差動機構である第1遊星歯車装置20の許容入力回転速度N1inを高く設定する。従って、許容入力回転速度N1inの制限によって第1遊星歯車装置20を高回転化から保護することが可能であると共に、許容入力回転速度N1inの変更に応じてエンジン回転速度Neを引き上げてエンジントルクTeを上昇させエンジントルク低下を補うことが可能となる。
(もっと読む)
自転車用回生制動制御装置
【課題】ブレーキ回生を行う制御装置において、回生制動と機械制動との間で違和感を生じにくくする。
【解決手段】回生制動制御部74は、自転車に装着可能なフロントブレーキシステムとリアブレーキシステムの変位に関連してモータ60を制御する。回生制動制御部74は、右ブレーキセンサと、左ブレーキセンサと、第1制御部75と、を備えている。右ブレーキセンサは、フロントブレーキシステムの移動位置を検出する。左ブレーキセンサは、リアブレーキシステムの移動位置を検出する。第1制御部75は、フロントブレーキシステムおよびリアブレーキシステムが変位すると、右移動位置と左移動位置とにより得られた加算位置に応じた第1回生制動力を発生するようにモータ60を制御する。
(もっと読む)
電動車両のメータ表示装置
【課題】充電コネクタのメンテナンス時期およびサブバッテリのメンテナンス時期を容易にメータ表示装置上で確認できるようにするとともに、表示部を小型化する。
【解決手段】メインバッテリと、メインバッテリから電力供給されて車両の駆動力を発生するモータと、モータの出力制御回路と、外部からの電力をメインバッテリに供給するための充電コネクタとを有する車両のメータ表示装置である。表示部49は、少なくとも車速表示部491および前記充電コネクタの状態に関する情報を表示する充電コネクタ状態表示部492を含む。充電コネクタ状態表示部492が、充電コネクタのメンテナンスに関する情報を表示するとともに、車速表示部491に隣接して配置される。車速表示部491の周囲には、メインバッテリ残量表示部494やサブバッテリ残量表示部493が配置される。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、歯打ち音に起因するドライバビリティの低下を抑制する。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)及び電動機(MG1,MG2)を含む動力要素と、蓄電手段(12)と、駆動軸と、動力伝達機構(300)とを備えたハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、内燃機関及び電動機のトルクを夫々決定するトルク決定手段(110)と、電動機のトルクを発生領域とならないように調整する調整手段(120)と、電動機に対する蓄電手段による充電及び放電を所定間隔で相互に切替えて、電動機のトルクの正負を変化させる切替手段(130)と、内燃機関及び電動機の少なくとも一方のトルクを、内燃機関のイナーシャトルクに応じて補正する補正手段(140)とを備える。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車両用電源装置
【課題】電池の充電開始時に電池を適正な温度にするとともに、車両の運転開始までに充電を完了する車両用電源装置を提供する。
【解決手段】車両用電源装置1の制御装置3は、設定された車両の運転開始予定時刻と電池状態とに応じて、充電開始時刻を決定するとともに当該充電開始時刻に電池モジュール2の温度が予め定めた設定温度条件を満たすようにヒーター10及び送風機30の少なくともいずれか一方の作動を制御し、車両の運転開始予定時刻までに充電を完了する。
(もっと読む)
変速制御装置
【課題】回生トルクがかかっている際の掛け替え変速において発生しうる戻し変速における変速ショックを回避する技術の実現。
【解決手段】第1の変速段から第2の変速段への変速指令があった後、第1の変速段へ戻す戻し変速指令があった場合に、変速プロセスの進行による入力部材の回転速度の変化が所定の回転変化しきい値未満の範囲では、駆動力源の負方向の出力トルクの絶対値が所定の判定しきい値以上である負トルク状態であることを条件として、第1の変速段への戻し変速プロセスが禁止される。
(もっと読む)
自動列車運転装置
【課題】複雑な調整を必要とせず、ブレーキ装置の動作状態によらず安定な自動列車運転装置を提供する。
【解決手段】列車の速度を検出する速度検出部11と、前記列車の走行位置を演算する位置演算部12と、前記列車の目標速度を規定する速度パターン生成部13と、前記速度パターンと前記列車速度に基づきノッチ指令を生成するノッチ制御部14と、前記ノッチ指令に基づき前記列車速度を減少させ、電気ブレーキと空気ブレーキからなるブレーキ装置15と、前記電気ブレーキおよび前記空気ブレーキの動作状態を検出する、ブレーキ状態推定器18を備え、前記ノッチ制御部14は、ブレーキ状態推定器18が回生有効信号とノッチ指令と応荷重信号から算出したブレーキ状態信号に応じてパラメータを調整する
(もっと読む)
車両用制動装置
【課題】回生制動による制動力を状況に応じて変えるとともに、車両の運動エネルギを好適に電気エネルギに変換できる車両用制動装置を提供することを課題とする。
【解決手段】走行用モータ3の減速比を変更可能な変速機4aを有するハイブリッド車両HVに備わり、ブレーキペダルの操作量に応じて設定される目標制動力に基づいてブレーキアシスト制御する車両用制動装置1とする。そして、走行用モータ3を回生制御して回生制動力を発生する回生ブレーキと、油圧で作動するブレーキ作動部Brで摩擦制動力を発生する油圧ブレーキと、を備え、ブレーキアシスト制御の開始条件が成立したとき、車両用制動装置1は、回生制動力が低下するように減速比を設定した後で減速比の変更を停止し、回生制動力と摩擦制動力で目標制動力を発生することを特徴とする。
(もっと読む)
201 - 220 / 2,356
[ Back to top ]