
Fターム[5H115SJ11]の内容
車両の電気的な推進・制動 (204,712) | 設定手段 (480) | 車両の内部に設定手段があるもの (322)
Fターム[5H115SJ11]の下位に属するFターム
加速指令のためのもの (48)
減速又は停止指令のためのもの (84)
前後進指令 (16)
方向転換指令 (13)
Fターム[5H115SJ11]に分類される特許
41 - 60 / 161
電動車両
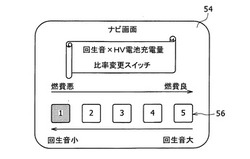
【課題】ユーザの要望に応じて回生音の発生をコントロールできる電動車両を提供する。
【解決手段】バッテリから電力供給を受けて走行用動力を出力可能であるとともに車両の回生制動時に発電を行う第1のモータ14を備えたハイブリッド車両1であって、第1のモータ14による回生制動の使用比率を変更するための操作スイッチ56が設けられている。
(もっと読む)
架線レス車両の運行支援装置

【課題】本発明の目的は、架線レス車両のエネルギー効率を向上させるような速度パターンを算出することが可能な架線レス車両の運行支援装置を提供することである。
【解決手段】本発明は、架線レス車両の運行ダイヤ情報と走行区間上にある次駅の情報と走行区間上にある複数の信号機の情報とを予め記憶する記憶手段2と、運行ダイヤ情報と次駅の情報と複数の信号機の情報とに基づいて架線レス車両の速度パターンを算出する速度パターン算出手段3とを備え、速度パターン算出手段3は、架線レス車両が最初の信号機で止まらないことと、現在停車中の駅から発車する際について一定の加速度aで加速を行うことと、加速後は架線レス車両が一定の第1の速度V1で走行することとを満たす速度パターンを算出するようになっている。
(もっと読む)
充電状態報知装置およびナビゲーション装置
【課題】車両の走行の動力源となるバッテリを充電する際に、充電開始後にユーザが車両を離れた場合であっても、目標とする蓄電量が実現したことをユーザに明確に通知すると共に、その通知のために要する電力を低減する。
【解決手段】バッテリへの充電時に車両の主電源がオフになった場合、制御部49がスリープモードに移行し、比較部48は、バッテリの現在の蓄電量が目標蓄電量以上となったか否かを判定する。また、バッテリの現在の蓄電量が目標蓄電量以上となったと比較部48が判定すると、比較部48が制御部49をスリープモードからアクティブモードに移行させ、制御部49は、アクティブモードに移行したことに基づいて、通信部45を制御して、バッテリの蓄電量が目標蓄電量に到達したことをユーザ端末に通知する。
(もっと読む)
電気車駆動システム
【課題】アクティブサスペンションや軸ばねの可変特性といったハードウェアの追加や変更が不要で、車体の振動乗り心地を改善する手法が必要である。また、電動台車で容易に実現できる手法が望ましい。
【解決手段】車輪を有する台車の上に車体が搭載された電気車であり、台車に装荷された電動機が歯車を内蔵した駆動装置を介して車輪を駆動することにより走行する電気車両において、電動機のトルクにより車体の振動抑制制御を行う。また、台車振動を電動機の回転速度から演算した情報をもとに電動機のトルクにより台車振動を抑制し、間接的に車体の振動の抑制を行う。
(もっと読む)
フロントフォークユニット及び電動アシスト自転車
【課題】効率的な電力供給を可能とするフロントフォークユニット及び電動アシスト自転車を提供する。
【解決手段】フロントフォークユニットは、前輪1を回転可能に支持する脚部2Aと、前輪1に取り付けられ、前輪1を駆動させる電動モータ3と、脚部2Aに取り付けられたバッテリー6Aと、電動モータ3とバッテリー6Aとの間において脚部2Aに取り付けられる制御装置8と、制御装置8及び電動モータ3に電気的に接続される電力ケーブル7とを備える。
(もっと読む)
車載蓄電機構の温度制御装置
【課題】湿度センサを備えなくとも車載蓄電機構における結露の発生の抑制と同蓄電機構の昇温とを両立することのできる車載蓄電機構の温度制御装置を提供する。
【解決手段】この車載蓄電機構の温度制御装置は、二次電池温度TBに基づいて車室11内の空気を二次電池40に供給する。また、車室11内への外気の導入状態に基づいて、車室11内から二次電池40への空気の供給量であるファン風量Vを設定する。
(もっと読む)
電気自動車用充電システム
【課題】各電気自動車用バッテリ装置に対し、各バッテリ装置に適合した定格の充電電圧及び充電電流で正確にかつ安全に充電を行う。
【解決手段】電気自動車に搭載されているバッテリ装置1と、バッテリ装置1に充電を行う充電器2とからなる充電システムであって、バッテリ装置1は、バッテリ装置1の定格の充電電圧及び充電電流の情報を記憶する記憶部5を有し、充電器2は、充電電圧及び充電電流の情報の入力を受け付ける入力部7と、バッテリ装置1の記憶部5に記憶されている定格の充電電圧及び充電電流の情報を呼び出して、入力された充電電圧及び充電電流の情報と比較し、一致した場合には充電開始信号を送信し、不一致の場合には充電中止信号を送信する比較部8とを有し、バッテリ装置1又は充電器2は、充電開始信号を受信した場合には充電を開始し、充電中止信号を受信した場合には充電を中止する制御部9を有する構成とした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】自車の空気抵抗変化が変化した場合であっても適切な運転スケジュールの設定が可能であり、バッテリ充電量の過不足の発生を防止することが可能なハイブリッド車両の制御装置を提供すること。
【解決手段】目的地までの経路状況に応じてモータとエンジンの使用割合である運転スケジュールを設定する運転スケジュール設定手段30を備えたハイブリッド車両の制御装置1において、自車の空気抵抗変化状態を検出する空気抵抗変化状態検出手段61〜65を設け、検出された空気抵抗変化状態を考慮して、必要な走行パワーを算出する。これにより、例えば、窓開度の変化、ルーフキャリアの装着状態などの空気抵抗変化状態を考慮して、運転スケジュールを設定することが可能となり、バッテリ充電量の過不足の発生を防止できる。
(もっと読む)
自動列車制御装置および列車制御方法
【課題】地上装置あるいは車上装置の無線機能がシステムダウンした場合であっても、通常運転への移行時間を短縮することが可能な自動列車制御装置および列車制御方法を得る。
【解決手段】停止目標位置を演算する演算部9を有する地上装置7と、地上装置7から送信された停止目標位置を受信し速度制御パタ−ン16を演算して列車速度を制御する車上装置11、21と、を備えた自動列車制御装置であって、列車A、Bには車上装置11、21から送出された列車識別情報を送出する車上子12、22が設置され、路線には車上子12、22から送出された列車識別情報を受信する受信機能を有する地上子19、29が設置され、地上装置7は、地上子19、29が受信した列車識別情報と、地上子19、29の設置間隔に対応する列車B在線区間17および列車A在線区間27を管理する在線区間管理部10を有する。
(もっと読む)
充電監視装置、電気自動車、およびサーバ
【課題】電気自動車等、車両外部の電源によって充電され、充電による電力で走行可能な車両の充電状態を監視する監視装置において、ユーザが監視装置にアクセスすることなく希望のタイミングで充電状態を把握することができる技術を提供する。
【解決手段】充電システムが搭載された電気自動車おいては、車両側処理にて、ユーザによる指令に基づいて、取得した充電状態を外部送信する際の通信条件を設定する(S140)。そして、設定された通信条件になると、予め設定された通信相手であるサーバに対して充電状態を送信する通信を行う(S170)。従って、ユーザは電気自動車にアクセスすることなく、満充電になる前であっても充電状態を把握することができる。
(もっと読む)
車両の制御装置
【課題】搭載スペースを確保しつつ、外部充電時において蓄電機構の充電に関連する電気機器を選択的に作動させて、外部充電時の消費電力の低減および蓄電機構の充電時間の短縮を図る。
【解決手段】制御装置300は、充電ケーブルが接続されたことを検出する結合確認センサと、充電ケーブルのプラグの接続が検出されると、複数の電気機器のうち外部充電装置による充電に関連する予め定められた電気機器群に接続される通信線328を経由して起動信号を送信して、電気機器群を起動制御する。
(もっと読む)
軌道走行車両の走行制御装置
【課題】複数台の軌道走行車両が連結された状態で走行するときに発生する走行速度のオーバーシュートを低減可能な軌道走行車両の走行制御装置を提供する。
【解決手段】
鉄輪15と、鉄輪15を回転駆動する鉄輪駆動モータ16と、走行操作装置130,180と、コントローラ140と、速度センサ150とを備えた軌陸作業車1と、同様の構成の車両100と、軌陸作業車1と車両100を連結する連結棒70とを備え、コントローラ140は、軌陸作業車1および車両100が連結棒70により連結された状態で走行する際に、走行操作装置130,180の指令値に基づいて鉄輪駆動モータ16および116の駆動を制御し、さらに鉄輪駆動モータ16について、速度センサ150または250により検出された走行速度を検出し、走行速度を指令値に対応する目標速度とするように補正して鉄輪駆動モータ16の駆動を制御する。
(もっと読む)
燃料電池システム
【課題】車両の緩加速時に酸化剤ガスの流量増加が遅れることによる燃料電池の電圧低下を抑制し、燃料電池の電圧低下に起因する劣化等の問題を回避できるようにする。
【解決手段】目標値生成手段31にて、車両ドライバのアクセル操作に基づく燃料電池の基準目標発電電力と、基準目標発電電力の変化量を制限した目標発電電力とを算出し、目標発電電力に対応する目標電流を算出する。また、修正目標電流生成手段33にて、燃料電池に供給される空気圧力に対応する最大取出電流を算出し、基準目標発電電力と目標発電電力との差分に基づき当該差分が大きいほど大きな値となる過大取出電流を算出し、この過大取出電流を最大取出電流に加算して修正最大取出電流を算出する。そして、修正最大取出電流と目標電流とで値が小さい方を、燃料電池が出力する修正目標電流として算出し、パワーマネージャに出力する。
(もっと読む)
車両運転装置
【課題】 様々な条件で走行する車両に対して、種々の走行状態あるいは周囲環境に対応する動特性モデルを選択することができ、適切な動特性モデルにより定位置停止制御の精度を向上させることができる。
【解決手段】 車両運転装置としての自動列車運転装置2は、車両としての列車1の運転を制御するための複数の動特性モデルを保持する動特性モデル保持部を有している。自動列車運転装置2は、複数の動特性モデルのうち当該車両の走行状態あるいは周囲環境を監視する動特性モデル切換部を有する。自動列車運転装置2の動特性モデル切換部は、上記のような監視の結果として得られる当該車両の走行状態あるいは周囲環境に応じた最適な動特性モデルを適宜選択する。自動列車運転装置2は、上記動特性モデル切換部が選択した最適な動特性モデルに基づいて制御指令部が当該車両の走行を制御する。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面に加わる力に応じた計測信号を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、移動体モードと、移動体モードの場合よりも車輪6の駆動を制限して椅子としての使用を可能とする椅子モードとの間で動作モードを切替えるモード切替手段と、を備えるものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面に加わる力に応じた計測信号を出力する力センサ9と、搭乗席8の座面8aの角度を変えるように、前記搭乗席を駆動する駆動部5と、駆動部5の駆動量と搭乗席8の平衡位置姿勢と力センサ9からの計測信号とに基づいて、車輪6及び駆動部5を駆動するための指令値を算出する制御計算部51と、を備えるものである。
(もっと読む)
走行台車の電源供給システム
【課題】複数の電源装置で構成された走行台車の電源供給システムであっても簡単な構成で交流電力の供給を受けられるようにする。
【解決手段】トロリー線5若しくは前記トロリー線6から交流電力の供給を受けて走行する搬送台車4がある。搬送台車4は各部を交流電力により駆動する駆動源9と、交流電力を集電する前方集電子7aと後方集電子7bと、集電子7により集電した交流電力を前記駆動源9へ供給する電力供給配線13と、いずれか一方の前記集電子7からの交流電力を駆動源9に供給させる電磁開閉器8とを備えている。電磁開閉器8は、後方集電子7bが集電しているときには、後方集電子7bの交流電力を前記駆動源9に供給させるとともに、前方集電子7aからの交流電源の供給を遮断する。そして、後方集電子7bが無給電区間Xを通過しているときには、電磁開閉器8は、前方集電子7aから集電した交流電力を前記駆動源9に供給させる。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】車両用動力伝達装置において回転要素の高回転化を防止し、それによりその回転要素やそれと連動して回転する部品の耐久性低下を抑えることができる制御装置を提供する。
【解決手段】自動変速部20が動力伝達可能状態であるときに、ニュートラルシフト指示NSHがあったことがニュートラルシフト指示判断手段72により肯定された場合において、高回転化予測判断手段74は、自動変速部20が動力伝達遮断状態になったとした場合に第3回転要素RE3が所定の上限値LMT1を超えて高回転化することになるか否かを予測し判断する。そして、高回転化予測判断手段74がその判断を肯定した場合に、高回転化防止手段76は、自動変速部20を動力伝達可能状態のまま維持する。従って、第3回転要素RE3の高回転化が未然に防止され、その結果、第3回転要素RE3やそれと連動して回転する第2電動機M2などの部品の耐久性低下を抑えることができる。
(もっと読む)
車両およびその制御方法
【課題】発電機を正常に駆動できない異常時に電動機の動力のみによる走行をより長く継続可能とする。
【解決手段】第1モータ(MG1)を駆動するインバータのゲート遮断が可能な範囲内で第1モータを正常に駆動できなくなる所定の異常が生じたときに、第1モータ用インバータをゲート遮断した状態でエンジンを最高回転数Nemaxで自立運転し(S150,S160)、回転数Nm1で回転し逆起電力を発生する第1モータで発生可能な最大の発電電力が生じるよう高電圧系の目標電圧VH*を設定すると共に高電圧系の電圧VHが設定した目標電圧VH*になるよう昇圧回路を駆動制御し(S180,S190)、バッテリの入出力制限Win,Woutの範囲内で要求トルクTr*により走行するよう第2モータ(MG2)を制御する(S110〜S150)。これにより、第2モータからの動力のみによる走行をより長く継続可能とすることができる。
(もっと読む)
ハイブリッド駆動装置及び駆動制御装置
【課題】内燃機関と電動機と蓄電装置とを備えるハイブリッド駆動装置において、マニュアル変速モードで変速段が変更された場合に、内燃機関の実際の回転数がマニュアル変速モードでの目標とする回転数へ到達するまでの時間を低減すること。
【解決手段】ハイブリッド駆動装置100は、内燃機関22、第1電動機21、第2電動機23、バッテリ50を備え、メインECU70で制御される。ハイブリッド駆動装置100が搭載されるハイブリッド車両20の運転者により変速段が設定されるマニュアル変速モード、かつ駆動軸64a、64bが被駆動状態となる条件が成立する場合には、バッテリ50に対する充電量の制限値を前記条件が成立しない場合以上とする。
(もっと読む)
41 - 60 / 161
[ Back to top ]