
Fターム[5H115TO10]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | 重量、乗客量検出 (230)
Fターム[5H115TO10]に分類される特許
1 - 20 / 230
電気自動車
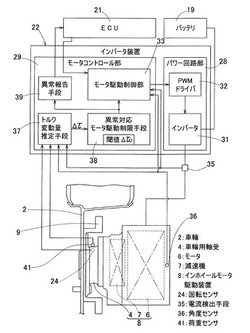
【課題】 車輪用軸受、モータ、減速機等の異常に対して、適切な車両の駆動が行えて、車輪用軸受、モータ、減速機等の信頼性確保が行える電気自動車を提供する。
【解決手段】 ECU21およびインバータ装置22を備えた電気自動車において、トルク変動量推定手段37をインバータ装置22に設ける。トルク変動量推定手段37は、車輪回転数を検出する回転センサ24もしくはモータ6の角度センサ36から得られる回転数の変動量、荷重センサ41が検出する路面・タイヤ間の車両進行方向の荷重の変動量、またはモータ電流の変動量から、車輪用軸受4、モータ6、または減速機7に起因するトルク変動を含むトルク変動量を、定められた規則により推定する。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム

【課題】電動機による発進に際し、ドライバビリティの違和感を改善させること。
【解決手段】ハイブリッド自動車1が電動機13により発進するのに際し、予め設定されているハイブリッド自動車1のアクセルペダル22の踏み込み量に応じた電動機13の回転速度に基づいて電動機13の回転速度を制御するハイブリッドECU18を構成する。
(もっと読む)
蓄電池システム
【課題】走行用モータで走行移動する電気自動車等の電気車両において、動力源である電池の利用効率を向上することが可能な蓄電池システムを提供する。
【解決手段】本発明の蓄電池システムは、走行用モータで走行する電気車両に搭載される蓄電池システムであって、第1電池ユニットと第1電池ユニットより後から追加して装着される第2電池ユニットとを含む複数の電池ユニットと、複数の電池ユニットがそれぞれ装着される複数の電池装着部と、第2電池ユニットを電池装着部に装着するときに、複数の電池装着部のうち第2電池ユニットが装着可能な電池装着部を案内する案内部とを有する。
(もっと読む)
倒立二輪車
【課題】モータの負荷が高い場合であっても、安定した動作を行うことができる。
【解決手段】倒立二輪車は、駆動手段にかかる負荷を取得する負荷情報取得手段と、倒立二輪車の姿勢角の情報を取得する姿勢情報取得手段と、駆動手段にかかる負荷と、姿勢情報取得手段により取得された姿勢角と、に基づいて、倒立二輪車が倒立状態を維持できる限界姿勢角と、姿勢角が限界姿勢角に達する前に警告を行うための警告姿勢角と、を求める演算部と、駆動手段を駆動制御する制御部と、を備える。制御部は、現在の姿勢角が警告姿勢角以上に傾動した場合には、ユーザに警告を発する制御を行い、現在の姿勢角が前記限界姿勢角以上に傾動した場合には、ユーザに警告するとともに前記駆動手段の出力を下げる制御を行う。
(もっと読む)
電池制御システム、電池ECU、充放電制御ECU
【課題】電動車両において、電池パックの数が変動しても、充放電制御の処理が複雑化することを抑制できる電池制御システムを提供する。
【解決手段】スレーブ電池ECU20b、20cは、自身に対応するサブ電池パックの特性(定格容量の現在値および充電容量の現在値)をマスタ電池ECU20aに送信する。マスタ電池ECU20aは、スレーブ電池ECU20b〜20cから送信された定格容量の現在値および充電容量の現在値と、メイン電池パックの定格容量の現在値および充電容量の現在値とから、総定格容量の現在値および総充電容量の現在値を算出し、充放電制御ECU50へ送信する。充放電制御ECU50は、この総定格容量の現在値および総充電容量の現在値を用いて充放電制御を行うので、充放電制御ECU50は、電池パックの数によらず、同じ制御ロジックで充放電制御を行うことができる。
(もっと読む)
ハイブリッド電気自動車の回生制御装置
【課題】惰行運転時においてエンジン減速モードとモータ減速モードとの間の制動力の格差に起因する減速感の相違を解消した上で、モータ減速モードでは電動機の回生制御により最大限の発電量を実現できるハイブリッド電気自動車の回生制御装置を提供する。
【解決手段】モータ減速モードによる車両の蛇行運転時において、エンジンと電動機との間のクラッチを切断して、電動機の回生トルクを最大トルクライン上で制御することにより車両の減速エネルギの全てを回生発電に利用すると共に、最大トルクライン上におけるエンジンブレーキ近傍の回生トルクが得られる電動機の回転域でシフトダウンを実行することにより、エンジン減速モードと同様に減速感を実現する。
(もっと読む)
電動車の走行制御装置、および電動車
【課題】離席時制御による安全性向上を図りつつ、誤って離席が検知された場合に確実に車両を停止させることができる走行制御装置および電動車を提供する。
【解決手段】本発明に係る走行制御装置10は、目標速度を指令するための速度指令手段6と、車両速度を検知する速度検知部12と、車両速度が目標速度に一致するように走行用モータ17を制御する制御部11とを備えた走行制御装置において、オペレータが離席しているか否かを検知する離席検知部9と、走行路が坂路であるか否かを検知する坂路検知部13とをさらに備え、制御部11は、オペレータが離席していること、および走行路が坂路であることが検知された場合は目標速度をゼロとし、オペレータが離席していること、および走行路が坂路ではないことが検知された場合は目標速度を予め定められた微小速度として走行用モータ17を制御する。
(もっと読む)
電動車両の制御装置
【課題】発電装置を最適燃費点で稼働させて、発電による燃費の低下を抑制できる電動車両の発電制御装置の提供を図る。
【解決手段】車両コントローラ4は、駆動用モータ1の制御装置7、電池2の制御装置9、エンジン12の制御装置14、発電機13の制御装置15等、システム全体の制御を行う。この車両コントローラ4は、車両の走行中に発電を行うか車両の起動スイッチをオフにした駐車中に発電を行うかを判断して発電装置3を作動制御する発電制御機能を備え、この判断により駐車中に発電装置3を作動させることで、駐車後の走行に必要な電力を供給可能としている。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両用温度調整装置
【課題】バッテリを適正の温度で使用することができ、ドライバーの運転開始までの待ち時間を減らすことができる車両用温度調整装置を提供する。
【解決手段】車両用温度調整装置100は、受信機120が受信したスマートキー10信号を、ドライバーの車両への接近情報として車内LAN101に出力するスマートエントリECU110を備える。また、車両用温度調整装置100は、スマートエントリECU110により検知されたドライバーの車両への接近情報に基づいて、発進が予測される時刻を推定し、該推定時刻において、温度センサ151,161により検出されたインバータ150及びバッテリ160の温度が目標温度範囲となるように温度調整を指示する温度調整信号を作成する温度調整ECU140を備える。温度調整ECU140は、ドライバーの発進指示前に、予めインバータ150及びバッテリ160の温度調整を開始する。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
車両走行制御装置
【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
情報提供システムおよび情報提供方法
【課題】本発明は、ユーザに省エネルギー運転を行わせる際に、ユーザの運転負荷を低減することが可能な情報提供システムを提供する。
【解決手段】車両の位置情報および走行情報を取得する車両情報取得手段と、車両の位置情報および走行情報に基づいて、車両の走行経路を予測する予測手段と、予測手段により予測された走行経路における道路情報を取得する道路情報取得手段と、道路情報を所定のパラメータで表し、パラメータの変化量が所定範囲内にある走行経路内の区間を、演算区間として設定する設定手段と、設定手段により設定された演算区間ごとに、車両の駆動力を制御するための制御情報を生成する生成手段と、を有することを特徴とする情報提供システム。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】モータで発生する回生電力をバッテリに適切に充電する制御を行うことにより、回生用抵抗器の小型化及びエネルギーの有効利用を図ることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、電力を供給するバッテリBと、バッテリBからの電力によって走行用の駆動力を発生するモータ41と、車両の速度を検出する速度センサ36と、車両の姿勢を検出する3Dジャイロセンサ37と、速度センサ36及び3Dジャイロセンサ37の検出結果に基づいてモータ41で発生する回生電力の電力量を推定する回生電力量推定部38bと、回生電力量推定部38bの推定結果に応じてバッテリBの充電量を制御する充電制御部38bとを備える。
(もっと読む)
制御装置
【課題】駆動源が停止している停止期間にバッテリから放電される自己放電量を、現在の車両位置における停止期間の気温の予測値に基づいて算出し、算出した自己放電量および必要な出力電力に基づいて、電池の残存容量の使用範囲下限を算出し、この算出値に基づいてバッテリの残存容量を制御する技術において、気温を予測するための記憶容量を節約する。
【解決手段】車両に搭載された制御装置は、車両から離れた位置に設置されるセンタから、現時点における車両の位置を含む地域における気温の情報を有する気象情報マップを繰り返し受信し(ステップ210〜250)、最後に受信した気象情報マップに基づいて、車両の駆動源が停止している停止期間の気温を予測する。
(もっと読む)
充電プラン生成装置及び充電プラン生成方法
【課題】走行ルートに必要な電力量を過不足なく充電して、バッテリの長寿命化を考慮した充電プラン生成装置及び充電プラン生成方法を提供することを目的とする。
【解決手段】バッテリ(230)に充電された電力に基づいて走行する車両(200)の車両データを受信してメモリ(110)に蓄積するステップと、蓄積された車両データに基づいて走行ルートを決定するステップと、走行ルートを走行する場合の予想使用電力量(S)を走行ルートにおける走行電力量及び回生電力量を考慮して演算するステップと、バッテリに予想使用電力量が充電されるような充電プランを生成するステップを有することを特徴とする充電プラン生成方法、及び充電プラン生成装置(100)。
(もっと読む)
案内軌条式鉄道用モニタリング方法及び装置
【課題】 台車や案内輪の劣化を推定できるようにする。
【解決手段】 案内アーム4に設けたロードセル13より入力される案内輪5の荷重信号について、時刻歴応答波形を求め、現時点より過去一定時間までの最大値又はRMS値を求めて、それを或るサンプリング回数分記憶する。記憶してある最大値又はRMS値の平均値を求めて、案内軌条式鉄道の車両納入当初のときに同様にして得た平均値との変化量を求め、その変化量が或るしきい値よりも大となると、表示装置にエラーを表示させて、このエラー表示により案内輪5や案内軌条7の長期的な劣化を推定できるようにする。更に、記憶してある最大値又はRMS値の平均値に対し、次にサンプリングされた最大値又はRMS値の変化量が、別に設定して或るしきい値よりも大となるときにもエラーを表示させ、このエラー表示により案内輪5の急な損傷や案内軌条7の局所的な損傷を推定できるようにさせる。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両用充放電管理システム
【課題】走行経路や車両の状態等に応じて電池の状態を適切に管理できる車両用充放電管理を提供する。
【解決手段】電池101に蓄えられた電力により走行する車両の走行経路と、前記車両及び/又は道路の状況とに応じて、前記電池101の充電量が所定の範囲内に収まるように、前記走行経路における前記電池101の充放電スケジュールを作成する充放電スケジュール作成手段15と、前記走行経路を複数の区間に区分し、前記区間ごとに、実際の充電量と、前記充放電スケジュールにおける充電量とを対比し、その対比結果に応じて、それ以降の区間における前記充放電スケジュールを修正する充放電スケジュール修正手段15と、を備える車両用充放電管理システム。
(もっと読む)
走行装置、その制御方法及び制御プログラム
【課題】走行装置の安定性を向上させること。
【解決手段】走行装置は、車両の重心位置を検出する重心位置検出手段と、車両のホイールベースLを伸縮させる伸縮手段と、重心位置検出手段により検出された車両の重心位置に基づいて、伸縮手段によるホイールベースLの伸縮を制御する制御手段と、を備えている。制御手段は、伸縮手段を制御して、搭乗者の前後方向又は左右方向の姿勢を変化させずに、ホイールベースLを伸縮させてもよい。
(もっと読む)
1 - 20 / 230
[ Back to top ]