
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
3,461 - 3,480 / 5,473
ナビゲーション装置、画像生成方法及び画像生成プログラム

【課題】撮影画像に案内用画像を合成した案内画面の視認性を向上させる。
【解決手段】まず、車両が案内ポイントに差し掛かった時点での外部状況を判定する(S101,S102,S104)。続いて、判定した外部状況に基づき、可視光カメラ及び赤外線カメラから車両の進行方向前方の撮影に最も適したカメラを選択する(S103,S105,S106)。そして、選択したカメラによる撮影画像に案内用画像を合成する(S107〜S111)。つまり、可視光カメラ及び赤外線カメラから外部状況に応じたカメラを選択し、その撮影画像に案内用画像を合成して表示させるようにしている。このため、明るさに応じた好適な撮影画像が得られることとなり、外部状況の影響による撮影画像の劣化を防ぐことができる。
(もっと読む)
車両用表示装置

【課題】運転者が障害物までの距離感や転舵方向などを一見して理解することができる車両用表示装置を提供する。
【解決手段】車体部材28によって形成される運転者の死角領域を撮影する死角撮影手段3と、該死角撮影手段3によって撮影した死角領域映像cを前記運転者に対し表示する表示手段5と、を設けた車両用表示装置において、前記車体部材28を前記運転者側から透過した半透明車体モデル11と、前記死角撮影手段3によって撮影した死角領域映像cとを合成する合成手段を備えた。
(もっと読む)
運転支援装置
【課題】運転者が車両を一時停止させるか否かを精度よく判別することができ、適切な運転支援を提供することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、一時停止位置の手前における運転者の運転操作を支援する支援手段34,22と、一時停止位置に対する運転者の注視行動を検出する注視行動検出手段20,16とを備え、支援手段34,22は、注視行動検出手段20,16により検出される車両減速中における注視行動の有無に応じて、運転操作の支援仕様を切り替える。
(もっと読む)
航空機衝突感知および回避システムならびに方法
衝突感知および回避システムならびに方法と、当該衝突感知および回避システムを含む、無人操縦飛行体(UAV)および/または遠隔操縦飛行体(RPV)のような航空機とである。衝突感知および回避システムは、当該航空機に対して起こり得る衝突脅威を識別し、いかなる認識された脅威も回避する操作を提供する画像インテロゲータを含む。モーションセンサ(例えば、結像および/または赤外線センサ)が、周囲の画像フレームを、当該フレームにおいて移動している近くの目標を検知するクラッタ抑制および目標検知ユニットに提供する。見通し線(LOS)複数目標追跡ユニットが検知された近くの目標を追跡し、LOS座標において、各検知された近くの目標についての進路履歴を維持する。脅威評定ユニットが、いずれかの追跡された近くの目標が衝突脅威を伴うかどうかを判断する。回避操作ユニットが、飛行制御およびガイダンス部に、いずれの識別された前記衝突脅威も回避する操作を与える。 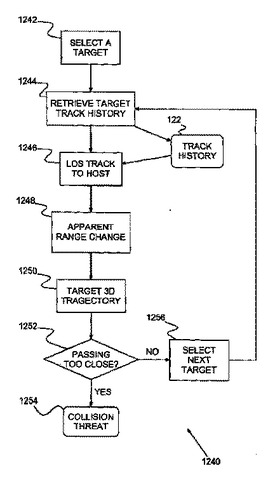 (もっと読む)
(もっと読む)
データ構造及びそれを利用したナビゲーションシステム
【課題】ナビゲーションシステムにかかる負荷を小さくすることで、認識対象地物を検出したときに、認識対象地物から制御対象地物までの距離を、迅速に出力できるデータ構造を提供する。
【解決手段】制御対象地物の座標データと、認識対象地物を認識すべき制御対象道路を規定する制御対象道路データと、制御対象道路内に存在する認識対象地物を認識するための認識対象地物データと、制御対象地物から認識対象地物まで距離を規定する距離データと、を備え、座標データ、制御対象道路データ、認識対象地物データ、及び距離データが制御対象地物毎に関連付けられている。
(もっと読む)
車両検出装置、ナビゲーション装置、車両検出プログラムおよび車両検出方法
【課題】車両の画像と同様の特徴を持つ画像が画像内に含まれる場合に、正確に車両の有無を検出することができなかった。
【解決手段】自車両の振動を検出し、前記自車両の後方に位置する道路の画像を取得し、前記振動を検出したときの前記自車両の位置に基づいて、前記振動を前記自車両に対して与えた路面上の構造物の位置を前記画像内で特定し、前記画像から車両の画像の特徴を抽出して前記他車両を検出するにあたり、前記構造物の位置においては、前記構造物の周囲の画像から車両の画像の特徴が検出されなければ、少なくとも当該構造物の位置に他車両が存在しないと判定する。
(もっと読む)
画像認識装置、画像認識方法、歩行者認識装置および車両制御装置
【課題】画像内に映し出される路面上に描かれた模様や記号などの路面標示を精度よく認識することで、画像内から判別の対象となる物体が存在する蓋然性の高い候補領域を予め精度よく特定することができ、車載のカメラで撮影された画像内の物体の認識精度を向上させることを課題とする。
【解決手段】カメラで撮影された入力画像内の白線(例えば、路面にペイントされた中央線など)を認識して、路面領域の切出しを行うとともに、道路に対応する基準データに基づいて、入力画像内の路面領域の中から道路外の領域を特定する。道路以外の領域を特定した入力画像を俯瞰した状態に画像変換し、路面標示の基準データに基づいて路面標示認識を行うとともに、路面標示以外の領域を歩行者認識の候補領域として特定する。
(もっと読む)
車載用ナビゲーション装置及び道路種判別方法
【課題】一般道路や高速道路などの道路種を精度良く判別可能な車載用ナビゲーション装置を提供する。
【解決手段】撮像部12は自車両の後方の路面を撮像する。路面標示認識部13は撮像部12にて撮像された路面の画像から路面標示の認識を行う。路面凸状態認識部14は路面の画像から路面の高低の変化を路面凸状態として認識する。そして、判別部15は路面標示の認識結果と路面凸状態の認識結果を加味して道路種の判別を行う。
(もっと読む)
交差点安全走行システム
【課題】車両の速度や交差点からの距離、さらに運転者の運転スキル等に関係なくより安全に交差点を走行することができる交差点安全走行システムを提案する。
【解決手段】信号機情報受信部307は、カメラ201で撮影したLED信号機101aの画像データを画像処理して信号機情報400を取得する。データ解析部310は、信号機情報400の交差点ID401により交差点20を特定し、ブランチID402により車両10の進行方向の道路の信号機を特定する。判断部312は、信号機情報400、車両情報及び停止距離205から、交差点20の走行が危険かどうか判断する。危険と判断されたとき、判断部312の指示に基づいて警報部313は、警報信号を発信する。音声出力部314は、警報信号を受け運転者に制動が必要であることを音声で警報する。
(もっと読む)
車載用ナビゲーション装置及び自車位置修正方法
【課題】マップマッチングによる自車位置の修正及びそれに基づいた画面表示を行うにあたり、画面上での自車位置の変動を大いに縮小し、安定した自車位置の表示に寄与することができる「車載用ナビゲーション装置及び自車位置修正方法」を提供すること。
【解決手段】車線用ナビゲーション装置において、地図データを参照して(S1)自車が走行中の道路の幅員あるいは車線数に応じて複数の仮想リンクを生成し(S6)、自車位置がGPS位置を中心とする所定の距離範囲から外れたときに、該自車位置をGPS位置に最も近い仮想リンク上へマップマッチングさせ(S7)、画面に表示されている当該走行中の道路の、当該仮想リンクに対応した位置に自車位置マークを表示する(S8)。さらに、走行車線間を区分する走行車線ラインも併せて表示する。
(もっと読む)
駐車場管理システム
【課題】駐車券を交換し、駐車料金をごまかす不正の摘発をする。
【解決手段】入場時、駐車券発行機で発行した駐車券の駐車券番号を記録し、画像処理装置が撮像認識した車番を記録する。出場時、料金精算機で読み取った駐車券の駐車券番号から当該駐車券を発行した時点の入口で撮像した車両の車番と、出口車番カメラにより撮像している車両の車番とを画像処理装置から受け一致しているかを判定する。一致している場合は料金精算機に精算処理開始をさせる。不一致の場合は少なくとも出口車番カメラにより撮像している出場車番の車両について入場時に発行した駐車券番号と、料金精算機が読み取った駐車券番号を発行した車両の車番を出力し、プリントアウトする。
(もっと読む)
遠隔用入力装置およびこれを用いた電子装置
【課題】 ディスプレイを見ながら容易に遠隔入力をすることができる「遠隔用入力装置およびこれを用いた電子装置」を提供する。
【解決手段】 複数の入力操作領域および入力操作領域への入力を検出する検出手段を備えた遠隔用入力装置100と、ディスプレイと、入力を促すための複数の選択ボタンをディスプレイ上に表示する表示手段と、複数の入力操作領域の数よりも選択ボタンの数が多いとき、複数の入力操作領域の一部に、割当ての変更を表す変更用選択ボタンを割当てる割当て手段と、検出手段により複数の入力操作領域への入力が検出されたとき、当該入力に割当てられた選択ボタンへの入力が行われたと判定する入力判定手段と、入力判定手段により変更用選択ボタンへの入力があったと判定されたとき、複数の入力操作領域の中の選択された入力操作領域に対する選択ボタンの割り当てを変更する割当て変更手段とを有する。
(もっと読む)
車両用経路算出装置および車両用経路算出方法
【課題】車両用経路算出装置において、障害物との接触時における車速の算出精度を高めて、自車両との相対速度が相対的に高い障害物との接触を回避した経路を選定する。
【解決手段】ロータリーエンコーダ12およびカメラ11等によって得られた情報に基づいて、自車両200が障害物(1,2,3)に接触するのを回避することが可能か否かを所定の時間間隔ごとに繰り返し判定する回避判定手段13aとしての機能と、後述する自車両200の横移動に伴う減速度の低下を見込みつつ、障害物との接触時における相対速度を算出し、算出された相対速度が相対的に最も低い障害物に接触する経路を選定する経路選定手段13bとしての機能を備える。
(もっと読む)
運転支援装置
【課題】 運転情報の提示の態様をより一層工夫した運転支援装置を提供する。
【解決手段】 予め定める複数種類の条件の1つが成立したときに記録された運転情報であって、少なくとも車両に設置されたカメラにより撮影されたカメラ画像と、成立した条件の種類を示す条件情報とが含まれる運転情報を取得し、取得された運転情報に含まれる前記条件情報から、成立した条件の種類を判別し、各運転情報に含まれるカメラ画像を複数並べてサムネイル表示(470)し、各カメラ画像について、成立した条件の種類を示すマーク(430)を各カメラ画像の一部分に表示する。
(もっと読む)
車両用表示システム、ナビゲーションシステム
【課題】自車両と周囲の状況を把握容易に表示する現在位置表示システムを提供すること。
【解決手段】撮影手段を備えた路側装置から所定の撮影範囲の元画像を車両に送信する現在位置表示システムであって、車両は、該車両の位置を検出する位置検出手段14aと、道路地図を記憶した道路地図記憶手段15と、位置を含む道路地図を地図記憶手段から抽出して該車両の位置を示すマークと共に表示装置に表示する道路地図表示手段14dと、元画像を路面に略垂直な視点の平面画像に視点変換する画像変換手段14bと、平面画像を道路地図における前記撮影範囲に重畳すると共に、前記平面画像に撮影されている該車両に前記マークを重畳して表示する画像重畳手段14cと、を有することを特徴とする。
(もっと読む)
車両用運転支援装置、及び、車両用表示装置
【課題】自車両をすれ違い可能な位置に誘導するための制御を適切に行なうことができる車両用運転支援装置、及びこれに適した車両用表示装置を提供すること。
【解決手段】道路幅を含む自車両の周辺状況を取得する周辺状況取得手段と、周辺状況取得手段が取得した自車両の周辺状況に基づいて対向車とのすれ違いが可能か否かを判定するすれ違い可否判定手段と、対向車とのすれ違いが可能な自車両後方の位置をすれ違い可能位置として特定すると共に設定したすれ違い可能位置に自車両を誘導する誘導制御を行なう誘導制御手段と、を備え、すれ違い可否判定手段により対向車とのすれ違いが不可能であると判定され、且つ所定の開始条件を満たす場合に、誘導制御手段による誘導制御を開始することを特徴とする、車両用運転支援装置。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の終了後の車両姿勢のばらつきを抑制する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の開始を検出した場合(ステップS21)、その時点の車両状態及び走行環境のうちの少なくとも一方を検出し(ステップS22)、検出した車両状態及び走行環境のうちの少なくとも一方に基づいて、車両が走行車線に戻る際の車線逸脱防止制御の終了タイミングを補正する(ステップS24)。
(もっと読む)
行き先通知方法およびシステム
【課題】 電話番号で行き先を表示する行き先通知システムにおいて、電話番号を運転手に知られないようにする。
【解決手段】入力される行き先情報に基づき携帯端末装置20の電話帳データから行き先の電話番号を抽出し、行き先情報に対応した電話番号を抽出し、抽出した電話番号を二次元バーコード化し、該二次元バーコードを用いて行き先情報リストを作成する。使用に際して、作成した行き先情報リストを前記携帯端末装置20の表示部に表示し、表示した二次元バーコードを車載機30に読み取らせ、二次元バーコードから得た電話番号情報をカーナビゲーション部に渡す。カーナビゲーション部はその表示部に行き先経路を表示する。
(もっと読む)
車両検出装置
【課題】カメラなどの撮像手段によって撮像した画像データにおいてリフレクタ等の外乱光源による光源領域を、誤って車両のランプによる光源領域として検出することを低減すること。
【解決手段】車載カメラ10によって撮像した画像データにおいて、光源により明領域となっている光源領域がある場合、自車両が走行している車線を区画する区画線の位置を基準として、その光源領域が路側に設けられたリフレクタによる光源領域の列であるかどうかを検出する。そして、リフレクタによる光源領域の列とみなされる場合には、他車両のランプを光源とする光源領域を検出する際の、検出対象から除外する。この結果、路側に設けられるリフレクタなどの外乱光源を、誤って他車両ランプを光源とする光源領域として検出することを極力低減することができる。
(もっと読む)
車両用視界状況判定装置
【課題】自車両単独で視界状況を判定することができる車両用視界状況判定装置を提供する。
【解決手段】夜間走行時、ヘッドライトが点灯している状態で、散乱光検出領域off_arに含まれる各画素glの輝度勾配を演算し、この輝度勾配に基づいて霧(非霧)を判定する。
(もっと読む)
3,461 - 3,480 / 5,473
[ Back to top ]