
Fターム[5H180DD03]の内容
交通制御システム (133,182) | 交通量の検出、処理、表示 (1,633) | 交通量及びその変動の検出 (1,256) | 速度別に検出するもの (141)
Fターム[5H180DD03]に分類される特許
81 - 100 / 141
渋滞影響判断プログラム、渋滞影響判断方法及び渋滞影響判断装置
【課題】真に駐車車両により渋滞を引き起こしている区間、時間帯を適切に判断する。
【解決手段】所定の道路区間上の駐車車両の有無に関する情報及び渋滞の程度に関する情報を記録している交通情報テーブル12を参照して、当該区間に駐車車両が有ることを検出したときからの当該区間の前記渋滞の程度の推移を算出すし、渋滞の程度の推移に基づいて、駐車車両の渋滞に対する影響のレベルを判断する影響判断部11とをコンピュータに実現させることにより、駐車車両の渋滞に対する影響を判断させる。
(もっと読む)
RFIDタグを搭載した車両、RFIDタグ、速度計測システム、及び、速度計測方法

【課題】速度情報等の取得に効果的な車両を提供することを課題とする。また、設置領域の自由度を拡大した速度計測システムを提供することを課題とする。また、メンテナンスが容易であり、かつ、誤動作した場合においても、誤動作か否かを検証可能なシステムを提供することを課題とする。
【解決手段】車両に関する情報を保持するためのメモリ部を有するRFIDタグを車両に搭載し、外部のリーダライタとRFIDタグとが情報のやり取りを行う。また、車両に関する情報を保持するためのメモリ部を有するRFIDタグと、RFIDタグと情報のやり取りを行う通信装置を車両に設置し、外部のリーダライタとRFIDタグとが情報のやり取りを行った際に、通信装置はその状況、例えば、速度情報や日時の情報などをRFIDタグのメモリ部に保持する。
(もっと読む)
交通制御システム及び交通制御方法
【課題】運転者に走行指示することなく渋滞の緩和が可能な交通制御システム及び交通制御方法を提供すること。
【解決手段】隘路よりも走行方向Bにみて後方にある第1地点P1に交通渋滞が発生するか否かを、車両検知装置D2による検知結果に基づき判定する判定手段61と、判定手段61により第1地点P1に交通渋滞が発生すると判定された場合、交通遮断装置4を制御して遮断地点P1aにおける車両交通を遮断する遮断手段62と、遮断手段62による遮断の解除時刻T4を算出する解除時刻算出手段63と、交通遮断装置4を制御して、遮断手段62による遮断の解除を解除時刻算出手段63により算出された解除時刻T4に行う遮断解除手段64とを有する。
(もっと読む)
移動検出画像生成装置
【課題】移動する物体の移動を検出するために用いる動画像として、環境の影響を受ける度合いが低減するように加工された動画像を提供する。
【解決手段】抽出手段1は、道路上の物体を光学的に逐次撮像して得た複数の撮像画像より、物体を撮像した時刻における路面上での該物体の位置を示す位置情報に基づいて、該時刻での該位置における路面からの高さが所定の範囲内の領域が写っている部分を抽出する。生成手段2は、抽出手段1が抽出した部分を加工した画像を時刻に従って並べて移動検出画像を生成する。位置情報は例えばレーダ型センサにより計測された距離である。移動検出画像は、抽出した部分に対応する画像を位置に対応付けて配置した位置対応画像や、撮像画像において前記部分を識別することができるように加工した識別画像を、時刻に従って並べたものでもよい。
(もっと読む)
平均速度測定装置
【課題】本発明は、安価に道路を通過する車両の平均速度を測定することを課題としている。
【解決手段】本発明の速度測定手段3は、ドップラー方式の検出センサーであり、車両の速度を測定することができ、これにより測定される速度データから、車両が通過したことを判定し、通過車両数をカウントすることによって、平均速度を測定する。
(もっと読む)
交通情報提供装置、交通情報提供システム、異常データの検出方法およびデータ収集方法
【課題】路上センサによって取得されたリンクデータに異常が含まれていた場合、異常が検出されたリンクを、プローブデータを優先してアップロードの対象とするリンクとし、信頼性の高い交通情報の提供サービスを行う。
【解決手段】交通情報提供装置1において、路上センサ2から取得したセンサデータと主成分分析により生成される基準パターンとを内積演算することにより生成される基準パターンの含有率が所定の値に満たないときに、路上センサ2から取得したリンクデータを異常とみなしてプローブデータ優先リンクとして出力し、車載端末5において、そのリンクのプローブデータを積極的にアップロードするとともに画面に交通情報を表示する構成とした。
(もっと読む)
情報提供車両及び運転支援装置
【課題】運転者の生体情報に基づく情報に基づいて、より適切な支援を行うこと。
【解決手段】運転者が走行中に危険を感じた場合、その緊張感から生体情報は変化する。そこでプローブカーは、運転者が危険と感じた地域を、運転者の生体情報の変化に基づいて特定する。そして、特定された危険地域に関する情報をプローブ情報センタへ送信する。プローブ情報センタでは、プローブカーから送信された危険地域に関する情報を収集し、危険地域マップを生成する。運転者が運転支援を希望した場合、車両に搭載された運転支援装置は、運転支援に必要な範囲に対応する危険地域マップをプローブ情報センタから取得する。運転支援装置は、プローブ情報センタから提供された危険地域マップに基づいて、経路上に存在する危険地域を検出する。運転支援装置は、検出された危険地域の存在を運転者に通知することによって運転支援を行う。
(もっと読む)
交通渋滞情報提供システム
【課題】一般道路等においても交通渋滞状況を自動的に把握可能とする。
【解決手段】車両がGPS機能を搭載しており、車両に搭載された位置速度送信装置が、規定時間間隔で、GPS機能により取得した位置情報と、車両の速度計から取得した走行速度情報を、渋滞情報管理サーバへリアルタイムに送信し、一方、渋滞情報管理サーバは、前記受信した情報を基に、「走行車両台数と走行速度」との関係をトラフィクパタンとして算出し、算出したトラフィクパタンと、データベースに予め格納されている数種類の代表的なトラフィクパタンと照合し、一致しているトラフィクパタンから交通渋滞状況を把握し、走行中の車両に交通渋滞情報として提供する。
(もっと読む)
車両減速判定システム、信号制御装置、車載装置、信号制御方法、車両減速判定方法及びコンピュータプログラム
【課題】信号灯色の表示時間が更新された場合であっても、道路の所定地点を通過するか又は所定地点の手前で停止するかを安全に判定することができる車両減速判定システム、信号制御装置、車載装置、信号制御方法、車両減速判定方法及びコンピュータプログラムを提供する。
【解決手段】信号制御装置1は、車両プロファイルに基づいて、評価関数PIが最小となる時刻t1を算出し、時刻t1に基づいて信号灯色の切り替え時刻の下限値Tを算出し、路側装置5を介して下限値Tを含む信号灯情報を車載装置4へ送信する。車載装置4は、信号灯情報を受信するとともに、車両の速度V、位置情報を取得する。車載装置4は、停止線までの距離Lを算出し、L≦V(T+β)でなく、L≧V2 /2d+αでない場合、減速度dで車両を停止させるべく減速信号を車両制御部へ出力する。
(もっと読む)
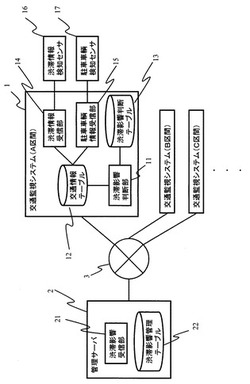
交通情報管理システム、及び、車載装置
【課題】車両において取得された交通情報を情報管理センターにおいて管理し、サービス情報として車両等に提供するシステムにおいて、インフラを拡大することなく情報管理センターの負担を軽減すること。
【解決手段】複数の車両に搭載され、車載通信手段30を備える車載装置10と、車載装置10との通信により得られた情報を管理する情報管理センター100と、からなる交通情報管理システム1であって、車載装置10は、交通情報を収集する交通情報収集手段20と、交通情報収集手段20により収集された交通情報、及び/又は他車両との通信により取得された交通情報、に対する集計処理を行なう集計処理手段56と、を備え、集計処理手段56の処理結果を情報管理センター100に送信することを特徴とする。
(もっと読む)
車両減速判定システム、車載装置、路側装置、コンピュータプログラム及び車両減速判定方法
【課題】道路の所定地点を通過するか又は停止するかを安全に判定することができる車両減速判定システム、該車両減速判定システムを構成する車載装置及び路側装置、該車載装置を実現するためのコンピュータプログラム並びに車両減速判定方法を提供する。
【解決手段】制御部は、受信した位置情報に基づいて、自車両から停止線までの距離L1、自車両から車両感知器2までの距離L2を算出する。また、制御部は、受信した信号灯情報に基いて、信号灯色が赤になるまでの時間Ta、信号灯色が赤になるまでの最大時間Tmax、信号灯色の青矢印の残り時間Tbなどを算出する。制御部は、算出した距離L1、L2、時間Ta、Tb、Tmax、予め設定された車両の減速度d、所定の余裕値αなどに基づいて、車両が交差点を安全に通過することができるか、あるいは停止線の手前で停止すべきかを判定する。
(もっと読む)
道路情報提供システム及び装置と道路情報生成方法
【課題】交通情報の位置分解能及び交通表現分解能を任意に設定でき、交通情報予測サービスにも柔軟に対応できる交通情報提供システムを提供する。
【解決手段】交通情報提供装置は、道路に沿って変化する交通情報の状態量を量子化し(b)、量子化した前記状態量を統計的に偏りを持つ値に変換し(c)、前記値を符号化して(d)、カーナビなどの交通情報利用装置に提供する。交通情報利用装置は、前記符号化されている前記状態量を復号化して前記道路における交通情報を再生する。
(もっと読む)
交通諸量検出方法及び交通諸量検出装置
【課題】路面付近に設けられた上流側センサ及び下流側センサの同一車両による各検出波形を対応付けることができる交通諸量検出方法の提供。
【解決手段】上流側の第1センサ、及び第1センサと所定長離隔した下流側の第2センサが、路上を走行する車両を各検出し出力した各出力波形に基づき、車両の速度及び交通量を検出する交通諸量検出方法。第1,2センサの各出力波形について、基準となる特徴点である第1,2基準点を各設定し(S21)、各設定した第1,2基準点の各時点以降の第1,2特徴点を各抽出し(S23)、各抽出した第1,2特徴点及び第1,2基準点の時点の各差である第1,2時間を各算出し、第1,2特徴点の時間差と第1,2時間の差とに基づき(S25、27)第1,2特徴点を対応付け(S29)、対応付けた第1,2特徴点の各時点と前記所定長とに基づき、車両の速度及び交通量を検出する(S31)。
(もっと読む)
画像認識装置
【課題】 自転車や二輪車およびそれらの乗員と歩行者との判別精度を向上させた画像認識装置を提供する。
【解決手段】 カメラで取得した画像Im(t1)(ステップS1)と過去画像Im(t2)(ステップS3)から、オプティカルフローを算出する等して対象物の移動速度を求める(ステップS7〜S23)。求めた対象物の移動速度に応じて認識辞書を設定し(ステップS25)、設定した認識辞書を用いてパターンマッチングを行うことで物体認識を行う(ステップS27)。このため、速度領域の異なる対象物と誤認識するケースを効果的に抑制できる。
(もっと読む)
移動物体計測システムおよび移動物体計測方法
【課題】移動経路を通過する移動物体をより正確に計数することができる移動物体計測システムおよび移動物体計測方法を提供する。
【解決手段】道路の側方に設けられる主検出ユニット1A、1B、および副検出ユニット3A、3Bには、赤外線距離センサが設けられている。赤外線距離センサは反射位置までの距離を検出するので、車両の速度、大きさ等の影響を受けない。このため、赤外線距離センサから得られる信号に基づいて、道路を通過する車両を正確に計数することができる。
(もっと読む)
車両走行制御方法
【課題】「交差点ノンストップ走行制御システム」の効果を維持しつつ同システムにおける大きな課題の一つである推奨走行速度での走行に対するドライバー負荷の軽減を図る。
【解決手段】時刻 td 以後最初に地点Pを時刻 tp に通過して交差点Aに向かう車両C1 に対して、推奨走行速度 vopt1=D/( tb − tp )≦ Vmax を提示して交差点Aまで定速走行させ、その後時刻 te までの間に地点Pを通過して交差点Aに向かう後続車両C2、C3、・・・Cn に対しては、各々の前方走行車両C1、C2、・・・Cn-1 に安全車間距離を保って許容最高走行速度を越えない走行速度で走行させて、全車両C1、C2、C3、・・・Cn-1、Cn を交差点Aが青信号の時刻 tb から時刻 tc の間に通過させる。
ただし、td = te −Tp 、te = tc −D/Vmax 、Tp:交差点A交通信号周期、D:地点P−交差点A間距離、Vmax:許容最高走行速度、tb :交差点A青信号点灯時刻、tc:交差点A青信号滅灯時刻。
(もっと読む)
プローブカーデータを用いたデータベース構築システム
【課題】プローブカーデータによる位置データと道路区間とがリンク付けされており種々の分析に直ちに利用可能な基礎的なデータベースを構築するシステムを提供する。
【解決手段】位置データ取得手段と、道路上に設定された道路点の位置を示す道路点座標データと、2つの前記道路点同士の間に設定された道路区間を固有に識別する道路区間識別データとを予め記憶した記憶手段と、位置データと道路点座標データとを比較することにより位置データがいずれの道路区間に含まれるかを判断し、その道路区間に対応する道路区間識別データとリンク付ける処理手段と、リンク付けされた道路区間識別データと共にデータベースに登録する手段とを有する。
(もっと読む)
画像処理による交差点での異常事象検出方法
【課題】交差点を複数の移動物体経路の組み合わせとして取り扱うことにより単純化して、異常事象の有無を判定する。
【解決手段】交差点を、車輌が通る複数の経路に分けて単純化し、他の経路も考慮して車輌停止が正常事象であるか否かを判定し、どの正常事象にも該当しない場合に異常事象と判定する。異常判別部2Hは、時刻tでサンプリングしたフレーム画像に関し、移動物体毎特徴量記憶部2Gにより得られた移動物体特徴量(クラスタ内接矩形の対角点座標、代表点の座標、速度ベクトル及び所属経路識別符号)と、経路決定・記憶部2Dにより得られた経路と、信号判定部2Eにより得られた交通信号状態に基づき行う。停止車があれば、その前方にも停止車があるか否かを調べ、経路内先頭の停止車の前方に車両が存在しないか否かを判定する。
(もっと読む)
磁気交通制御システム
【課題】本発明は車両の磁気シグネチャを測定するための装置に関する。
【解決手段】少なくとも一つの第1方向(2)に沿って配置されるように設計された少なくとも一つの第1セットのセンサー(Cxi)と、少なくとも一つの第2方向(4)に沿って配置されるように設計された少なくとも一つの第2セットのセンサー(Cyi)と、共通センサー上を通過する車両の時間的シグネチャS0(t)と前記第1セットのセンサー内のセンサーによって測定された結果である空間プロファイルS0(x)との間の関係を計算する計算手段とを備え、前記第2方向と前記第1方向の交点に、前記第1セットと前記第2セットに属する前記共通センサー(Cxy0)が配置されている。
(もっと読む)
運転支援装置
【課題】運転者が交通状況を認識しているか否かを正確に判断し、認識していない場合には交通状況についての情報を報知する運転支援装置の提供。
【解決手段】運転者の脳活動の情報を取得し(S11)、取得した情報を基に脳活動を解析する(S12)。また、車外状況を検出するセンサからの信号、車載カメラからの映像データを取込む(S13,S14)。自車に接近する車両、又は進行方向に存在する障害物があるにもかかわらず(S15,S18:YES)、運転手が認識していない場合(S16,S19:NO)、情報を報知することによって運転支援を行う(S17,S20)。
(もっと読む)
81 - 100 / 141
[ Back to top ]