
Fターム[5H180FF04]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 車載の位置センサを持つもの (4,762)
Fターム[5H180FF04]に分類される特許
1,941 - 1,960 / 4,762
位置検出装置及び位置検出方法
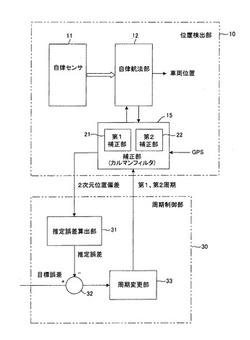
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
車両用警報装置

【課題】運転者が実際に車両を運転しているときに、その運転者に適した安全運転支援を行うことができる車両用警報装置を提供すること。
【解決手段】交通情報取得部93にて車両の外部における信号機情報を取得(S10、S11)し、走行情報取得部92にて車両の走行状態に関する走行情報を取得(S12)し、信号機情報と走行情報とから交差点を安全に通過可能か否かを判定し(S13)、安全に通過可能でない場合は、記憶装置50に記憶されている過去の運転操作記録を参照することによって現在の信号機情報と現在の走行情報とに近似する信号機情報と走行情報とを検索し(S14)、警報をうけた場合の運転者の運転操作を推測(S15)し、近似する信号機情報及び走行情報に関連付けられた操作情報に応じて(S16)警報内容を決定する(S17、S18)。
(もっと読む)
経路案内システム、ナビゲーション装置及び経路案内方法
【課題】レーンリストが過剰に大きくなるのを防止することができるようにする。
【解決手段】現在地検出部と、自車位置より前方に設定されたレーンリスト表示区間内に存在するレーンデータごとに、レーンリストを作成するための表示条件が成立するかどうかをレーンデータに基づいて判断する表示条件判定処理手段と、表示条件が成立したレーンデータを表示対象とし、表示条件が成立しないレーンデータを表示対象としない表示設定処理手段と、表示対象とされたレーンデータに基づいてレーンリストを表示するリスト表示処理手段とを有する。表示条件が成立したレーンデータが表示対象とされ、表示対象とされたレーンデータに基づいてレーンリストが表示されるので、レーンリストが過剰に大きくなるのを防止することができる。
(もっと読む)
情報処理装置、情報処理方法、情報処理プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】乗降地点決定の最適化を図り、車両および利用者の効率的な集合を図ること。
【解決手段】複数の車両によって同一の目的地点へ向かう複数の利用者が、車両に乗降する乗降地点を設定する情報処理装置100において、取得部101は、複数の車両および複数の利用者の現在地点を取得する。抽出部102は、複数の車両および複数の利用者の現在地点と、目的地点とに応じて、地図情報の中から乗降地点の候補となる複数の候補地点を抽出する。算出部103は、抽出された複数の候補地点と、複数の車両および複数の利用者の現在地点とから、複数の車両および複数の利用者による候補地点および目的地点までの移動時間を算出する。そして、決定部104は、算出された移動時間に基づいて、車両と、車両に乗降する利用者と、候補地点との組合せを決定し、設定部105は、決定された組合せから、乗降地点を設定する。
(もっと読む)
ナビゲーション装置
【課題】案内に対する運転者の認識度が車両周辺の環境の変化に応じて低下した場合にも必要な情報を確実に運転者に伝えられるようにするナビゲーション装置を提供すること。
【解決手段】画像情報又は音声情報により目的地までの経路を案内するナビゲーション装置100は、車両周辺の環境を検知する周辺環境検知手段3と、周辺環境検知手段3が検知した車両周辺の環境に基づいて案内に対する運転者の認識度が低下したか否かを判定する情報認識度低下判定手段11、12と、情報認識度低下判定手段11、12により運転者の認識度が低下したと判定された場合に画像情報又は音声情報による案内方法を変更する案内方法変更手段13と、を備える。
(もっと読む)
道路地図データ生成方法
【課題】一方通行マークをより適正に配置できる「道路地図データ生成方法」を提供する。
【解決手段】一方通行のリンクを形成するセグメント中に、18ピクセル長超のセグメント41が存在する場合には、存在するセグメントの内の最も終点ノードEN側のセグメント41の中点に、このセグメント41の通行方向を向いた、16ピクセル長の一方通行マーク40を配置する(c)。18ピクセル長超のセグメント41が存在しなかった場合には、終点ノードENからの距離が9ピクセル長となるセグメント上の位置REと、始点ノードSNからの距離が9ピクセル長となるセグメント上の位置RSとの間の最も長いセグメントを探索し、探索したセグメント411の中点に、このセグメント411の通行方向を向いた一方通行マーク40を配置する(d)。
(もっと読む)
車両用制御装置
【課題】前方の車両に接近した場合であっても違和感のない走行をおこなうことができる制御装置を提供することを目的とする。
【解決手段】走行中の自車両と前方の車両との車間距離に基づいて自車両のいずれかの動作機構を制御する車両用制御装置において、自車両の前方の車両に対する接近状態を検出する接近状態検出手段(ステップ11)と、交通渋滞の発生状態を検出する渋滞検出手段(ステップ12)と、自車両が前方の車両に接近していることを前記接近状態検出手段が検出し、かつ自車両が交通渋滞区間の中にあることもしくは自車両が交通渋滞区間に入ることを前記渋滞検出手段が検出したことに基づいて前記動作機構の制御内容を変更する渋滞制御実行手段(ステップ14)とを備えている。
(もっと読む)
ナビゲーション装置
【課題】 操作性および利便性を改善し、自車が停車した位置近傍の現在地施設と同一ジャンルの施設を検索する「ナビゲーション装置」を提供する。
【解決手段】 ナビゲーション装置は、自車位置を検出する検出手段と、少なくとも位置情報およびジャンル情報を含む施設データを有する道路地図データを記憶する記憶手段と、予め決められた条件に従い停車したか否かを判定する停車条件判定部100と、道路地図データを参照して、検出された自車位置近傍の現在地施設を判別する現在地施設判別部120と、自車の停車時間としきい値とを比較する比較部138と、停車時間がしきい値を超えないとき、判別された現在地施設と同一ジャンルの周辺施設を検索するための入力ボタンを表示する入力ボタン表示部140とを有する。
(もっと読む)
カード挿入警告システムおよび方法、ナビゲーション装置、車載機
【課題】DSRCのアプリケーションに適合した正しい種別のカードが車載機に挿入されているかどうかをユーザが容易に判断可能な「カード挿入警告システムおよび方法、ナビゲーション装置、車載機」を提供する。
【解決手段】地図情報メモリ23に記憶されたカード種別情報とリーダライタ61により取得された車載機50に挿入されているDSRCカード100のカード種別情報とが一致するか否かを判定するカード種別判定部(CPU25)と、ユーザに対して警告を報知する報知部とを設け、カード種別情報が一致しない場合に警告を報知することにより、各施設における無線通信サービスの利用場面毎に、そのサービスに適合した正しい種別のカードが車載機に挿入されているかどうかをユーザが容易に判断できるようにして、カードの挿入間違いによりサービスが利用できない状態を極力回避できるようにする。
(もっと読む)
車載用ナビゲーション装置およびその経路探索方法
【課題】無用な動的経路探索および経路誘導を回避することによって、ユーザの意図に適合した経路誘導を行うことができる「車載用ナビゲーション装置およびその経路探索方法」を提供すること。
【解決手段】交通情報取得手段4と、交通情報取得手段4によって取得される交通情報に基づいて動的経路探索を行う経路探索手段24と、経路探索手段24による動的経路探索が行われる領域をユーザが設定するための動的経路探索実行領域設定手段30と、動的経路探索実行領域設定手段30によって設定された領域においてのみ動的経路探索が行われるように経路探索手段24の動作を制御する制御手段32とを備えたこと。
(もっと読む)
ナビゲーション装置及び経路誘導方法
【課題】 交通規制の回避を簡易かつ適切に行うことができる経路誘導技術を提供する。
【解決手段】
本発明のナビゲーション装置は、VICSなどの交通情報を受信し、それに含まれる事故の情報を取得する。予定する経路上での事故に関する情報がある場合には、事故の種類、通行可能な車線の割合、時刻帯を取得して回避エリアを設定し、該回避エリアを事故発生からの時間に応じて一定の規則に従って変化させる。該回避エリアを回避するように経路を探索し、誘導を行う。
(もっと読む)
ナビゲーション装置および経路演算方法
【課題】ドライバーの好みや意志を尊重できるナビゲーション装置および経路演算方法を提供する。
【解決手段】車両の走行中に有料道路を利用した場合には、有料道路の入口インターチェンジ(入口IC)および出口インターチェンジ(出口IC)に関する情報を、通行履歴としてメモリ102に記憶させる。推奨経路の演算に際しては、通行履歴を考慮せずに演算した推奨経路に、有料道路の通行区間が存在する場合、所定の条件を満たすインターチェンジ(IC)が通行履歴として格納されたIC情報に存在するか否かを判断する。所定の条件を満たすICがIC情報に存在すると判断すると、当初演算した推奨経路上の入口ICに代えて、所定の条件をすべて満たすICを入口ICとして利用するよう設定する。出口ICについても同様である。その後、再度推奨経路を演算する。
(もっと読む)
ナビゲーション装置
【課題】自車位置がマップマッチング処理可能な許容範囲を逸脱した場合でも、現在の自車位置を好適に認識させるナビゲーション装置を提供することにある。
【解決手段】判別手段(CPU11、判別プログラム17b2)により、検出手段(CPU11、GPS測位部12、検出プログラム17b1)により検出された自車位置をマップマッチング手段(CPU11、マップマッチングプログラム17b3)によりマップマッチングする所定の道路がないと判別された場合、表示制御手段(CPU11、表示制御プログラム17b7)によって、算出手段(CPU11、算出プログラム17b5)により算出された現在の自車位置から自車位置履歴記憶手段(自車位置履歴データテーブル17a2)に最後に記憶された所定の道路上の位置までの方角及び距離を表示部14に表示する。
(もっと読む)
ナビゲーション装置
【課題】 ユーザーの意図を反映して2画面表示のスケールを自動調整する「ナビゲーション装置」を提供する。
【解決手段】 本発明に係るナビゲーション装置は、主画面52aのスケールを保持する第1のスケール保持部120と、従画面52bのスケールを保持する第2のスケール保持部130と、主画面のスケールが変更されたとき、変更されたスケールが従画面のスケールに一致するか否かを判定するスケール一致判定部140と、一致すると判定された場合、初期設定部100で設定されたスケールに基づき、従画面のスケールを変更するスケール変更部150とを有する。
(もっと読む)
ナビゲーション装置
【課題】視認し易い表示制御を行うナビゲーション装置を提供する。
【解決手段】案内方向と逆方向へ自車位置マークKを識別表示させながら移動させる。そして、案内地点周辺の地図領域を広範に表示させるとともに、案内地点周辺の地図領域における付加的情報の表示を非表示とする。
(もっと読む)
車両用運転支援装置
【課題】車群後方を走行する車両の無駄な加速又は減速を防止する車両用運転支援装置を提供すること。
【解決手段】車両用運転支援装置100は、車群Cの走行状態に関する情報を取得する車群走行状態取得手段11と、車群の進行方向の走行環境に関する情報を取得する車群走行環境取得手段12と、走行状態と走行環境とに基づいて車群速度の推移を予測する車群速度予測手段13と、車群速度予測手段13が予測した車群速度の推移に基づいて自車速度を制御する速度制御手段14と、を備える。
(もっと読む)
運転支援方法及び運転支援装置
【課題】ドライバーがミラー越しに車両周辺を見た際にピラーによって死角が生じる場合でも、死角領域の画像をピラーに表示することができる運転支援方法及び運転支援装置を提供する。
【解決手段】自車両に取り付けられた死角撮影カメラ4を用いて、自車両のピラーによって生じる死角エリアを撮影し、該死角エリアに相当する画像をピラーの内側に表示する運転支援方法において、ドライバーの頭部位置を検出するとともに、車室内に設けられたルームミラーの角度を取得し、ドライバーの頭部位置及びルームミラーの角度に基づき、ドライバーがルームミラーを介して車両周辺を視認した際に、ルームミラーに映ったピラーによって生じる死角エリアを算出し、死角撮影カメラ4が撮影した画像データのうち、死角エリアに相当する領域をピラーに投影する。
(もっと読む)
ナビゲーション装置、引き出し表示方法及び引き出し表示プログラム
【課題】地図において密集する施設を集約せず、引き出し表示により可能な限り施設のデータを表示する引き出し表示方法を提供する。
【解決手段】車両を誘導するナビゲーション装置において地図表示手段は、地図情報に基づいて表示画面に地図を表示する。また、密集判定手段は、施設情報に基づいて施設が密集しているか否かを判定する。密集判定手段により施設が密集していると判定された場合、引き出し表示手段は、表示画面において、地図上の施設の位置を示す引き出しにより、当該施設に関する表示データを表示する。これによれば、ナビゲーション装置は、施設が密集している場合であっても、自動的に施設を集約するのではなく、可能な限り多くの施設に関する表示データを引き出し表示することができる。
(もっと読む)
進路推定装置、および衝突緩和装置
【課題】他車両の進路を推定する進路推定装置において、自車線に進路変更してくる他車両の進路を精度よく推定できるようにする。
【解決手段】PCSにおいては、他車両の進路を推定する衝突緩和コントローラによる推定結果に基づいて、他車両と自車両とが衝突するか否かを判定し、他車両と自車両とが衝突すると判定すると、自車両が衝突する際の被害を緩和させる被制御対象を作動させる。衝突緩和コントローラは取得した検出結果を位置履歴としてRAMに記録し、RAMに記録された複数の位置履歴に基づいて、他車両の進路を二次曲線に近似することにより、他車両の進路を推定する。従って、自車両に対して接近してくる他車両が自車線に割り込んでくる場合に、他車両の進路を精度よく推定することができる。
(もっと読む)
ナビゲーション装置及び施設案内方法
【課題】誘導中の経路と大きくかけ離れることのない経路を再探索する「ナビゲーション装置及び経路再探索方法」を提供する。
【解決手段】誘導経路303の経路誘導中に(a)、カーソル311で路線351の選択を受け付けたならば(b)、現在位置302から選択路線351上の最寄り地点321に進み、選択路線351を選択路線351が誘導経路303から所定距離以上離れる直前の地点322まで走行し、選択路線351が誘導経路303から所定距離以上離れなる直前の地点322まで進んだならば、最寄りの誘導経路上地点323に戻る経路を迂回経路331として探索し、ユーザに提示する(c)。そして、ユーザから迂回経路331の採用が指示されたならば、誘導経路302(a)の現在位置302から迂回経路331の終点の地点323までの区間を迂回経路331で置き換える(d)。
(もっと読む)
1,941 - 1,960 / 4,762
[ Back to top ]