
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,141 - 2,160 / 2,931
車両走行支援装置
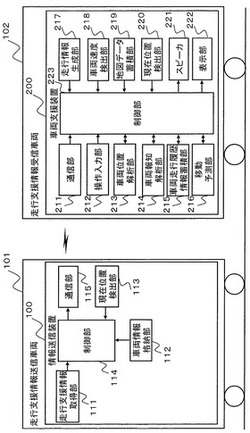
【課題】目視困難な領域の複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、自車の安全な走行情報を提示できる車両走行支援装置の提供。
【解決手段】本発明の車両走行支援装置は、車両走行支援情報を外部から受信する通信部211と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析部213と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析部214と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測部216と、移動予測部216で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成部217とを備えたことにより、自車の安全な追い越し、車線変更、右左折などの走行支援が可能となる。
(もっと読む)
運転指導装置

【課題】特定の道路上で発生した特定挙動を的確に把握して、道路上の特定挙動に対する運転指導を適切かつ効果的に行なうことができる運転指導装置を提供する。
【解決手段】運転中において、特定挙動位置診断部16により運転者が道路上の特定挙動頻発位置に接近するとこれを迅速かつ正確に認識できるとともに、運転終了後において、道路情報の分析部22により道路上で発生した特定挙動の特定位置および特定時間帯から道路挙動情報を客観的に把握できるので、特定の道路上で発生した特定挙動を的確に把握して、道路上の特定挙動に対する運転指導を適切かつ効果的に行なうことができる。
(もっと読む)
車車間通信システム
【課題】撮像した画像から車両の周辺に係る交通情報を抽出し、車両の挙動変化が所定変化量以上である場合に抽出した交通情報を他車に送信することにより、運転者に対して必要となる交通情報のみを選別して送信することを可能とした車車間通信システムを提供する。
【解決手段】前方カメラ5によって撮像した車両の前方環境の画像に基づいて自車の周辺に位置する対象物の種類と位置座標とを検出し(S2〜S6)、交通情報として抽出する(S7)とともに、抽出した交通情報を送信する際に対象物を避ける為の車両の挙動変化(蛇行運転や車線変更)があったか否かを判定し(S9、S10)、車両の挙動変化があった場合にのみ抽出した交通情報を送信する(S14)ように構成する。
(もっと読む)
経路案内システム及び経路案内方法
【課題】運転者が車両を非推奨領域に沿って走行させたときに、適切なレーン案内を行うことができるようにする。
【解決手段】自車の現在地を自車位置として検出する現在地検出部と、自車位置に基づいて目的地までの探索経路を探索する経路探索処理手段と、探索経路に基づいて、走行するのが推奨されるレーンを推奨レーンとして設定する推奨レーン設定処理手段と、自車が、走行するのが推奨されない非推奨領域に進入したかどうかを判断する非推奨領域判定処理手段と、自車が非推奨領域に進入した場合、非推奨領域の接続先のレーンが推奨レーンであるかどうかを判断する推奨レーン判定処理手段と、非推奨領域の接続先のレーンが推奨レーンである場合、レーン案内を行わない誘導判定処理手段とを有する。
(もっと読む)
車車間通信システム
【課題】送信対象となる車両の状態に基づいて設定された情報価値を交通情報に付加して送信し、交通情報を受信した車両が情報価値に基づいて受信した交通情報を出力することにより、運転者に対して必要となる交通情報のみを優先又は選別して送信することを可能とした車車間通信システムを提供する。
【解決手段】前方カメラ5によって撮像した車両の前方環境の画像に基づいて抽出された交通情報を他車両より受信した車両2は、受信した交通情報の情報価値が所定価値以上であると判定された場合(S123:YES)に、受信した交通情報を液晶ディスプレイ6に表示する(S124)ように構成する。
(もっと読む)
運転装置の制御装置
【課題】緊急ブレーキに異常が発生した場合においても、安全性を確保することができる運転装置の制御装置を提供できる。
【解決手段】運転手により手動で操作されて車両に走行指示を与える操作レバー20と前記車両を緊急に停車させるための緊急ブレーキ400とを備えた運転装置を制御するためのFM−ECU50であって、緊急ブレーキ400の異常が検出された場合は、安全確保のための車両制御処理を行う。安全確保のための車両制御処理とは、車両を減速させるための処理などである。このような構成により、緊急ブレーキ400に異常が発生した場合においても、安全性を確保することができる。
(もっと読む)
物体種別判定装置及び物体種別判定方法
【課題】斜めの線や曲線を多く含む物体の判定を可能にし、カメラで撮影された画像に現れる物体の種別を精度良く判定できるようにする。
【解決手段】カメラ1で撮影した画像を画像処理装置2に取り込み、各種の画像処理を行なってカメラ1の撮影画像に現れる物体の種別を判定する。このとき、画像処理装置2は、領域特定部11により、カメラ1の撮影画像において物体が存在する領域である慮域を処理対象領域として特定し、エッジ成分解析部12により、この処理対象領域内の各エッジ成分のエッジ方向やエッジ強度を求め、判定部13により、これら処理対象領域内の各エッジ成分のエッジ方向やエッジ強度の分布といった情報を用いて、この処理対象領域に存在する物体の種別を判定する。
(もっと読む)
車両の障害物検知装置
【課題】乗員の運転操作で回避しうる領域の障害物を車両の作動機器の制御の対象から除外して運転時の煩わしさをなくして安全且つスムーズに運転を行えるようにする。
【解決手段】ミリ波レーダ3(障害物検知手段)によって、自車両1の前方の障害物50を検知する。ミリ波レーダ3による障害物検知領域A1〜A4を、自車両1の前端部から所定距離前方に向けて設定し、その先端部を中央部分から後側方に向けて斜めにカットする。この障害物検知領域A1〜A4に障害物50が侵入したときに、制御ユニット(作動制御手段)によって車両の作動機器(警報装置、ブレーキ手段、シートベルトプリテンショナ等)を作動させる。
(もっと読む)
全周囲情報環状表示システム
【課題】車両周囲を撮像するカメラ動画像を処理して、車内の環状表示部分に車外の動画情報を投影または表示することにより、運転者を補助する全周囲情報環状表示システムを提供する。
【解決手段】本発明による全周囲情報環状表示システムは、1以上の動画カメラにより車両外部の全周囲の動画情報を常時取得している。環状の表示手段は、車両の前後左右の情報を環状部分に対応させて表示する。画像処理・認識手段は、前記カメラ手段からの動画情報を表示用画像処理および画像中の対象物の認識を行い、別に入力される操作子情報および付加情報を参照して表示対応画像と重ね合わせ情報とを合成して環状部分対応表示画像を形成し、前記環状の表示手段に出力する。
(もっと読む)
監視装置
【課題】良好な画質の監視画像を得ることのできる監視装置を提供する。
【解決手段】レーザ光を出射する送光部11と、送光部11から出射された光が監視対象に到達して反射された反射光を受光し、取り込んだ反射光を画像信号に変換して出力する受光部12とを備える監視装置であって、受光部12の監視画角に基づいて、送光部11の照射領域を調節する送光レンズ制御部27を具備する監視装置を提供する。
(もっと読む)
車車間通信システム
【課題】撮像した画像から車両の周辺に係る交通情報を抽出し、抽出した交通情報を構成する対象物の種類に基づいた送信条件で当該交通情報を他車に送信することにより、運転者に対して必要となる交通情報のみを選別して送信することを可能とした車車間通信システムを提供する。
【解決手段】前方カメラ5によって撮像した車両の前方環境の画像に基づいて自車の周辺に位置する対象物の種類と位置座標とを検出し(S2〜S6)、交通情報として抽出する(S7)とともに、交通情報を構成する対象物の種類に基づいた送信範囲に位置する他車両に対して当該対象物に関する交通情報を送信する(S11、S14)ように構成する。
(もっと読む)
車載カメラ装置を用いた運転支援装置
【課題】従来の車載カメラ装置では、メカニカルシャッタの制御が複雑となり、部品点数も多く装置全体が大型になり、更に、消費電力の点で不利である。また、車載カメラ装置で撮像された画像を用いて運転支援を行うものはない。
【解決手段】カメラ110は、交差点などの指定地点を、グローバルシャッタ型CMOSセンサ112によりズーム撮影して、その映像信号を信号記録再生回路122により記録媒体に記録する。グローバルシャッタ型CMOSセンサ112によりメカニカルシャッタを用いなくとも動く被写体の歪みの無い撮影画像が得られる。指定地点の手前で表示画面132の画面枠上部133aに、信号記録再生回路122からの撮影画像を表示すると共に、マップナビ140からの道路地図の上面図情報と走行地点及び指定地点の画像情報を表示させ、指定地点の実風景との対比や位置情報の把握を可能として運転支援に供する。
(もっと読む)
車車間通信システム
【課題】撮像した画像から車両の周辺に係る交通情報を抽出し、抽出した交通情報を他車に送信することにより、運転者に対して必要となる交通情報の情報量を減少させることなく情報通信に係る通信時間の短縮や処理負荷の軽減を可能にした車車間通信システムを提供する。
【解決手段】前方カメラ5によって撮像した車両の前方環境の画像に基づいて自車の周辺に位置する対象物の種類と位置座標とを検出し(S2〜S6)、交通情報として抽出する(S7)とともに、抽出した交通情報を他車に送信する(S14)ように構成する。
(もっと読む)
周辺車両位置検出装置および周辺車両の位置予測方法
【課題】周辺車両がそれまでの動きと異なる動きをしたときでも、最終的に求める周辺車両の位置の精度を向上させることが可能な「周辺車両位置検出装置および周辺車両の位置予測方法」を提供する。
【解決手段】カメラ2による周辺車両の撮影画像を用いて、画像処理部3が周辺車両のウィンカーの点滅状態から周辺車両の移動する方向を検出し、演算部4がその検出結果に応じて周辺車両の予測位置を設定する。そして、演算部4が、その予測位置とレーダ1による測定位置との比重計算によって周辺車両の位置を算出することにより、周辺車両の実際の動きに合わせた予測位置が求められられるようにして、予測精度を向上させることができるようにする。
(もっと読む)
車車間通信システム
【課題】撮像した画像から車両の周辺に係る交通情報を抽出するとともに、交通情報を送信する送信対象となる他車両の状態から抽出した交通情報に情報価値を設定し、設定した情報価値に基づいて当該交通情報を他車に送信することにより、運転者に対して必要となる交通情報のみを優先又は選別して送信することを可能とした車車間通信システムを提供する。
【解決手段】前方カメラ5によって撮像した車両の前方環境の画像に基づいて自車の周辺に位置する対象物の状態と位置座標とを検出し(S2〜S6)、交通情報として抽出する(S7)とともに、他車両の状態を取得し(S9)、取得した対象物の状態と他車両の状態とに基づいて設定された情報価値が所定価値以上であると判定された場合(S12:YES)に、抽出した交通情報を他車に送信する(S13)ように構成する。
(もっと読む)
車両位置算出方法及び車載装置
【課題】合流前に高精度な自車位置を算出することができる車両位置算出方法及び車載装置を提供する。
【解決手段】運転支援装置1のバックモニタコンピュータ3は、車両に設けられたカメラ20から画像データを取得する。そして、画像データを用いて、合流エリアに路面標示されたゼブラゾーンを検出する。また、検出したゼブラゾーンの幅を算出し、その幅と、ゼブラゾーン終端までの距離を記憶するテーブルに基づいて、加速車線内での車両の位置を算出する。
(もっと読む)
車両用表示装置
【課題】 表示装置の画面に表示される暗視撮影画像から障害物を容易に発見することを可能とする車両用表示装置を提供する。
【解決手段】 表示パネル100の共通画面上にメーター画像領域101〜104と車両前方の暗視画像を表示する暗視画像表示部120とが一体表示され、暗視画像中において車両前方に存在する障害物が識別された場合には、暗視撮影画像の表示領域121自体を画面上で拡大し、障害物を拡大して表示することを特徴とする。
(もっと読む)
道路走行支援システム
【課題】 道路のカーブ区間の注意すべき道路状況をこのカーブ区間に進入しようとする車両の運転者に確実に知らせる。
【解決手段】 道路10のカーブ区間1における道路状況の広角の動画像23を撮影する広角カメラ14と、広角カメラで撮影された広角の動画像23を平面画像24に画像変換し、この平面画像から道路状況の種別30を判定してその種別と当該道路状況が表示された平面画像24を出力する監視制御装置20と、道路10におけるカーブ区間1の両端近傍に設けられ、監視制御装置20から入力された種別30と当該道路状況が表示された平面画像24とを、カーブ区間1に向かう受信機41を搭載した車両12a,12bに対して電波送信する複数の通信機11a,11bとを備えている。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両の転回時に運転者による転回操作を効果的に支援する。
【解決手段】車両の現在位置及び自車方向と現在位置周辺の道路に関する情報とを含む道路情報と、車両の転舵角及び走行速度を含む車両情報とに基づいて、一般道路上で車両の転回操作が開始されたか否かを転回操作判定部4によって判定し、この転回操作判定部4によって決定された表示開始タイミング及び表示終了タイミングで、車載カメラ1によって撮像した車両の前方角部の死角領域の画像を車室内に設置された表示装置6に表示する。
(もっと読む)
車載レーダ装置
【課題】他車両の発する送信信号である電波との相互干渉が生ずるときにも、確実にその他車両と自車両との相対関係を検知することにある。
【解決手段】周波数変調する電波を、第1変調幅で発するレーダ領域と、その第1変調幅よりも小さい第2変調幅で発する車車間連携領域とを交互に所定時間周期で出現させて送信信号として出力させる。また、その送信信号と受信信号との周波数差を変動周波数とするビート信号を生成させる。更に、送信信号の出力状態が車車間連携領域にあるときにビート信号の変動振幅が所定の下限しきい値よりも大きい場合、自車両の送信信号と他車両の送信信号との電波干渉が生じていると判定させ、その両信号の位相差が解消されるように自車両の送信信号の送信タイミングを変更させる。そして、その送信タイミング変更がなされた後、送信信号と受信信号との位相差に基づいて自車両と他車両との相対距離を検出させる。
(もっと読む)
2,141 - 2,160 / 2,931
[ Back to top ]