
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,081 - 2,100 / 2,931
周辺物体追尾装置及び周辺物体位置予測方法
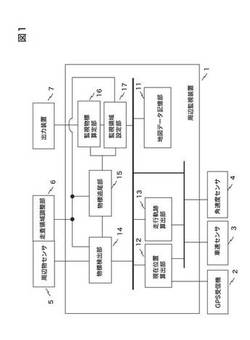
【課題】道路の屈曲区間を走行している場合にも、周辺物体をより適正に追尾し続けることのできる「周辺物体追尾装置及び周辺物体位置予測方法」を提供する。
を提供する。
【解決手段】自車の現時点の車速と移動の曲率半径と曲率中心と、監視物標の現時点の車速と移動の曲率半径と曲率中心とより、監視物標のΔt時刻後の位置を予測する。
ここで、自車の曲率半径と曲率中心は、地図データが表す道路の、現在位置算出部12が算出した現在位置に対応する道路上の地点の曲率半径と曲率中心として求める。また、監視物標の現時点の曲率半径と曲率中心も、地図データが表す道路の、現時点の監視物標の位置に対応する道路上の地点の曲率半径と曲率中心として求める。
(もっと読む)
自動運転制御装置

【課題】自動運転からマニュアル操作による運転に切換えられた後、ドライバの運転操作が適正であるかどうかチェックされた上で自動運転が完全に解除される自動運転制御装置を提供する。
【解決手段】本発明の自動運転制御装置には、ドライバが自動運転解除要求を行った後、実運転をドライバが引き継ぐまでの間に、ドライバが適正な運転操作を行い得るかどうかを判定する自動運転解除可否判定手段が設けられている。この自動運転制御装置は、S163〜S168に示されるように、ドライバによる運転操作と自動運転制御装置が最適と判断する運転操作とを比較して、この比較結果が一定時間、一定値以内であれば、ドライバは適正な運転をすることができると判定する。
(もっと読む)
自動運転制御装置
【課題】自動運転からマニュアル操作による運転に変更する際、前方を走行する車両との車間距離に加え、後方を走行する車両との車間距離をも十分に確保することができる自動運転制御装置を提供する。
【解決手段】車両50、車両51、車両52はそれぞれ本発明に係る自動運転制御装置が搭載されており、この自動運転制御装置によって、これらの車両で隊列を形成して走行する隊列走行制御が行い得るよう構成されている。この自動運転制御装置によれば、車両51が隊列走行を離脱するような場合、車間通信機26によって、その旨車両50、車両52に報知した上で、車両51の前方を走行する前方車両50と車両51との車間距離、及び車両51の後方を走行する後方車両52と車両51との車間距離を広げる制御を行う。
(もっと読む)
運転支援装置および運転支援方法
【課題】複数の運転支援機能を運転支援内容に基づいてグループ化し、ユーザからの指示で、運転支援機能を作動させることが可能な装置及び方法を提供する。
【解決手段】運転支援装置は、車間距離センサと、車載カメラと、車速センサと、操作スイッチ群と、スロットルアクチュエータと、ブレーキアクチュエータと、ハンドルアクチュエータとディスプレイと、スピーカと、車両コントローラとから構成される。ドライバの運転を支援する機能は、前車追従走行機能、定速走行機能、曲線過速度調整機能、周辺車両検知機能、進行方向歩行者検知機能から構成され、運転支援内容に基づいてグループされる。車両コントローラは、視界補助スイッチ、運転補助スイッチ、周辺監視スイッチからなる操作スイッチ群の動作状態により、グループ化した機能を作動させる。また、車両コントローラは、操作スイッチ群の動作状態をディスプレイに表示する。
(もっと読む)
周辺監視装置
【課題】一方の側方視界を直接視で視認し他方の側方視界を間接視で視認するまでの視線移動時間を短縮する周辺監視装置を提供する。
【解決手段】車両の右側方視界と前記車両の左側方視界とを1フレームで表す画像を前記車両に搭載されたカメラから取得する画像取得手段と、操舵ハンドル軸より左にある左画面に前記車両の右側方視界を前記画像の一部に基づいて表示する第一表示手段と、前記操舵ハンドル軸より右にある右画面に前記車両の左側視界を前記画像の一部に基づいて表示する第二表示手段と、を備える。
(もっと読む)
距離算出装置及び距離算出方法並びにその装置を有する車両
【課題】道路上を走行しながら前方の所定位置までの距離を精度良く求めることができる距離算出装置を提供する。
【解決手段】光ビーコン2より送信された情報を受信する受信手段と、光ビーコン2との相対位置を検出する位置検出手段と、前方の停止線Pまでの距離を求める距離設定手段とを備えている。受信手段は、光ビーコン2から停止線Pまでの距離情報を受信する。位置検出手段は、光ビーコン2から発せられた赤外線に基づいて当該光ビーコン2との相対位置を検出する。距離設定手段は、検出された前記相対位置と先に受信した前記距離情報とに基づいて停止線Pまでの距離を求める。
(もっと読む)
車間制御装置
【課題】本発明は、車間制御装置に係り、自車両を先行車両に追従走行させる追従制御を車両運転者の脇見時にも適切に行うことにある。
【解決手段】自車両を先行車両に目標車間時間で追従して走行させる追従制御を実行する車間制御装置において、車両運転者が視線を車両正面方向に向けない脇見状態にあるか否かを判別させ(ステップ108)、その判別の結果、車両運転者が脇見状態にある場合は、非脇見状態にある場合に比して、追従制御における目標車間時間Tを、その脇見における顔向き角度θに応じた時間ΔTだけ長くする(ステップ110,112)。
(もっと読む)
交差点における運転支援装置および交差点における運転支援方法
【課題】 交差他車両の状態に応じた運転支援を行うことができる交差点における運転支援装置を提供する。
【解決手段】 自車両Aの位置を検出する自車両位置センサと、自車両A前方の一時停止交差点を検出する交差点検出手段(ステップS1)と、一時停止交差点に接近する交差他車両Bの車両挙動を検出する交差他車両挙動検出手段(ステップS5)と、自車両Aが一時停止交差点手前の停止位置(一時停止線の手前の位置)からの発進前後における、交差他車両の車両挙動変化に基づいて、交差他車両Bのドライバが自車両Aの存在を認知する度合いを被認知度として推定する被認知度推定手段(ステップS6)と、推定された被認知度が高いほど、自車両Aが一時停止交差点内により進入した位置で再停止するように運転支援を行う運転支援手段(ステップS10)と、を備える。
(もっと読む)
航行システム
【課題】本発明は主に航空システムに関する。航空機の機種、性能、速度、方向、トラブル、気流などの要素データから単位時間に滞在する領域をセルとして演算し、複数のセルが重合するときに、重合セルを分離する回避ベクトルを求め、手動、自動のいずれかで回避ベクトルに従う航行をすることによって事故を防止するシステム。
【解決手段】航空機の速度、方向によるベクトルを回転軸、性能、気流、トラブルなどの要素データを算入して予測される航路を母線として円錐状の領域をセルとして演算し、複数のセルが重合したときに、セルが分離する回避を手動、自動で実行するシステム。
(もっと読む)
運転支援装置
【課題】前進運転と同様な運転操作感覚で後退運転を可能とする。
【解決手段】自車両の後方周辺画像を撮影するカメラ7と、運転者が前進運転時の姿勢において視認可能な位置に画像を映し出す表示装置9を設ける。シフトレバーがリバース位置に切り替えられると、カメラ7により撮影した後方周辺画像を表示装置9に映し出すとともに車両の方向制御輪を前輪から後輪に切り替える。報知部12は、ステアリング操作が切り替わったことをスピーカ10を介して報知する。速度制限部13は、速度を所定値以下に制限する。
(もっと読む)
運転者心理判定装置
【課題】運転者の心理状態を高精度に判定することができる運転者心理判定装置を提供することを課題とする。
【解決手段】運転者の心理状態を判定する運転者心理判定装置1であって、運転者の運転動作を検出する運転動作検出手段2,3,4と、運転場面を識別する運転場面識別手段5と、運転場面に対応する基本動作が記憶される記憶手段5と、運転場面識別手段5で識別した運転場面における運転動作検出手段2,3,4で検出した運転動作と記憶手段5に記憶されている基本動作とを比較し、当該識別した運転場面における動作時間の短縮を検出する動作時間短縮検出手段5と、動作時間短縮検出手段5での動作時間の短縮の検出結果に基づいて運転者の心理状態を判定する運転者心理判定手段5とを備えることを特徴とする。
(もっと読む)
車両の周辺監視装置
【課題】複数の撮像手段を介して取得される画像から車両周辺の対象物を検出する際に、検出対象物と背景対象物とが基準画像上で重なる可能性を低減して、対象物を精度良く検出することができる車両の周辺監視装置を提供する。
【解決手段】車両10に搭載された撮像手段2R,2Lを介して取得した画像から、車両10の周辺に存在する対象物を検出する。撮像手段2R,2Lを介して取得された画像のうちの所定の基準画像に対して、対象物を抽出する処理を実行する対象物抽出手段1と、車両10の走行環境を検出する走行環境検出手段1と、検出された走行環境に応じて対象物抽出手段1の処理で使用する基準画像を新たに選択する基準画像選択手段1とを備える。
(もっと読む)
目標警告を生成する方法およびシステム
【課題】目標警告を生成する方法を提供すること。
【解決手段】1つ以上の物体検出距離値、物体相対速度値、およびホスト乗り物速度値を組み合わせて、警告を特定するステップを含んでいる。目標警告を生成するシステムは、1つ以上の検出距離値を供給するための検出プロセッサと、ホスト乗り物速度値を受け取るためのトランシーバと、相対速度値を計算するための相対速度計算プロセッサと、1つ以上の検出距離値、相対速度値、およびホスト乗り物速度値を組み合わせて、警告を特定するための警告特定プロセッサとを備えている。
(もっと読む)
車線検出装置および車線逸脱警報装置
【課題】自車両が車線のある方向へ逸脱している場合と車線のない方向へ逸脱している場合とで異なる警報を行うことができるようにする。
【解決手段】車線検出装置2は、カメラ4で撮像した路面画像から生成した俯瞰画像に対して複数の車線検出領域を設定し、各車線検出領域において算出した輝度プロファイルに基づいて、自車両の走行車線、およびこの走行車線の両側外側における車線の有無を検知する。車線逸脱警報装置1は、車線検出装置2で得た車線検知情報と、横移動速度検出部12で検出された横移動速度情報とに基づいて、自車両が走行車線から車線のない隣側または車線のある隣側のいずれかの側に逸脱傾向にあるか否かを判定し、自車両が車線のある方向へ逸脱している場合と車線のない方向へ逸脱している場合とで異なる警報を行う。
(もっと読む)
位置検出装置及び位置検出方法並びにその装置を有する車両
【課題】道路における横断方向の自己位置を正確に検出することができる位置検出装置を提供する。
【解決手段】道路Rに設けられた光ビーコン10の送信部10a,10b,10cから発せられた赤外線を受信する受信手段2と、特性検出手段と、位置検出手段とを備えている。送信部10a,10b,10cから発せられる赤外線は、道路Rの車線L1,L2,L3毎に周波数が異なるように設定されている。前記特性検出手段は、受信した赤外線の周波数を検出する。そして、前記位置検出手段は、この検出した赤外線の周波数に基づいてどの車線を走行しているかについて検出する。
(もっと読む)
ドライブレコーダ活用装置
【課題】安全性を高めることが可能なドライブレコーダ活用装置を提供すること。
【解決手段】GPSにて特定される所定の地点を雨降りの夜間に時速60キロメートルで走行中に急ハンドルが発生した場合を想定する。この場合、制御装置20は、急ハンドルが発生した所定の地点を示すデータ、自車周辺が降雨状況にある旨を示すデータ、夜間である旨を示すデータ、自車の走行速度が時速60キロメートルである旨を示すデータをメモリ21に記録する。そして、これよりも後の別の時期において、過去に急ハンドルが発生した前記所定の地点に差し掛かることが予測されるとき、表示装置41及び音響装置42による報知が行われる。
(もっと読む)
画像速度算出装置及び画像速度算出方法
【課題】画像上で画像速度算出対象が高速で移動する場合でも、画像速度の算出を可能にする。
【解決手段】マイコン3により、カメラ1により撮像された画像上にカメラ1の露光中に発生する画像の流れを判定し、判定された画像の流れに基づいてカメラ制御部4によりカメラ1の露光時間を変更し、変更されたカメラ1の露光時間に基づいて、画像速度を算出する。
(もっと読む)
車車間通信装置
【課題】本発明は、通信相手を特定するのに時間を要することなく、また、レーダ波の干渉の影響をなくし車両間で情報の交換を行うことができる車車間通信装置を提供することを目的とする。
【解決手段】測位システムの衛星から受信した衛星時刻情報に合わせたタイミングで自車両のレーダ装置にレーダ波を送信させるタイミング合わせ手段と、他車両のレーダ装置から衛星時刻情報に合わせたタイミングで送信されたレーダ波と自車両のレーダ装置から衛星時刻情報に合わせたタイミングで送信するレーダ波とのビートから他車両の位置情報を検出する検出手段と、他車両の位置情報に基づいて他車両が自車両から所定範囲に存在するとき、レーダ波に通信情報を載せて送信する送信手段と、他車両から受信したレーダ波から通信情報を分離して取り出す受信手段を有する。
(もっと読む)
車載カメラシステム
【課題】車両の運転者が、その停車中に、信号機の発色に赤信号色から青信号色への変化があった場合にも、その発色変化の見落としを確実に防止することができ、車両運転時の操作不足を効率よく補助支援することができる車載カメラシステムを提供する。
【解決手段】前方の信号機104に赤信号色から青信号色への発色変化があった場合には、この発色変化があったことを自動的に判断して、車両101の運転者に対して、前方における信号機104の赤信号色から青信号色への発色変化を、早期にかつ正確に警告報知する。
(もっと読む)
走行速度監視プログラム、走行速度監視方法および走行速度監視装置
【課題】所定の範囲で示される地域毎に制限速度を設定することによって地図データを不要とし、走行速度監視装置の維持管理に掛かるコストを低減すること。
【解決手段】制限速度切替情報記憶部111が、地域と制限速度とを対応付けて地域毎に記憶し、制限速度切替処理部113が、車両10の位置と、制限速度切替情報記憶部111によって記憶されている地域毎の制限速度とに基づいて制限速度を自動的に切り替え、制限速度超過検知部114が、車両10の速度と、制限速度切替処理部113によって自動的に切り替えられる制限速度とを比較して、車両10の速度が制限速度を越えた場合に運転者に対して警報を通報するよう構成する。
(もっと読む)
2,081 - 2,100 / 2,931
[ Back to top ]