
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,041 - 2,060 / 2,931
車両制御装置

【課題】 走行状態制御では先行車との衝突を回避できない場合に衝突回避制御を実行する車両制御装置において、衝突回避制御が行われるような危険な状況に陥った場合に、確実に運転者の介入を促して走行の安全性を向上させる。
【解決手段】 「キャンセル」状態の時に、セットスイッチがオンされると「制御中:車間制御」状態へ遷移して車間制御を実行する。その車間制御では先行車と衝突を回避できない場合(衝突回避警報フラグXA=1)には「制御中:衝突回避警報」状態へ遷移して衝突警報を発生させ、衝突回避に必要な要求加速度が更に増大した場合(衝突回避制御フラグXC=1)には「制御中:衝突回避制御」状態へ遷移して衝突回避制御を実行する。「制御中:衝突回避制御」状態では、衝突回避制御フラグXCのリセット、又はアクセルペダルの操作が検出されると「制御中」状態内で遷移せずに、「キャンセル」状態へ遷移する。
(もっと読む)
車両用ハンズフリーシステム

【課題】自車両の走行状況を認識してハンズフリー通話の禁止・許可を決定し、予防安全性を向上する。
【解決手段】運転中のとき、自車両の走行情報や車外環境情報に基づいてハンズフリー通話の安全性を判断する(S3)。その結果、ハンズフリー通話の安全が確認された場合には、ハンズフリー通話を許可し(S4)、ふらつき走行による走行レーンからの逸脱、先行車両や路上の立体物への接近、路面グリップ力の低下、視界不良等によりハンズフリー通話の安全性が確認されない場合には、ハンズフリー通話を禁止し(S6)、警報を出力する(S7)。これにより、運転者のハンズフリー通話による運転操作に対する集中力の低下を防止し、また、車両制御システムで通常の運転状態とは異なる状態を検知した場合にも運転者の迅速な対応を可能とすることができ、予防安全性を向上して安全を確保することが可能となる。
(もっと読む)
物体検出装置
【課題】撮像手段による瞬間的に不安定な検出結果によりフュージョン物標の大きさ情報を適正に取得できない場合であっても、その影響を極力受けることなくフュージョン物標を更新すること。
【解決手段】生成されたフュージョン物標FPの更新時に、レーダ物標MPは検出できたが、撮像手段では瞬間的な画像ロストを生じて大きさ情報を適正に取得できなくても、撮像手段の検出結果に誤りがあり前回の検出物体が存在すると推定して、大きさ情報が過去に取得した該フュージョン物標FPの大きさ情報に基づく推定により補間された補間画像物標LIP1〜LIP4を用いて画像ロストフュージョン物標LFP1〜LFP4を生成してフュージョン物標FPを更新する。
(もっと読む)
携帯端末、車載装置、及び車両接近報知システム
【課題】異種局間で同一のチャンネルを利用しつつ相手局の種類(例:車載装置と携帯端末など)を簡単に識別することができる通信方式を実現すること。
【解決手段】携帯端末100の送信処理部120には、発信するon信号が周波数変調されるon・off変調処理手段が備えられている。車載装置500の周波数弁別器513は、携帯端末100の送信処理部120から送出されるキャリヤの周波数変調を復調する手段として備えられたものであり、判定部514は、その周波数変動の変動幅Δfが所定の閾値以上の値を示した場合には信号解析部531に受信信号rを出力し、この周波数変動の変動幅Δfが所定の閾値未満の値を示した場合には、受信信号rを無視する。その後段の信号解析部531は、入力された受信信号rを携帯端末100から送られてきた正規の信号として解析する。
(もっと読む)
走行車線推定装置
【課題】自車両の走行車線形状が変化する際の走行車線の曲り具合を精度よく推定する。
【解決手段】本発明は、走行状態検出手段により検出した自車両の走行状態とヨーレイト検出手段により検出した第1のヨーレイトの変化が緩やかになるようなフィルタ処理が施された第2のヨーレイトとに基づいて、自車両が走行する走行車線を推定する走行車線推定装置において、前記走行状態と前記第1のヨーレイトとに基づきフィルタ処理の特性を定めるカットオフ周波数を各々設定し、得られたカットオフ周波数のうち高いカットオフ周波数を選択しフィルタ処理の特性を設定することを特徴とする。
(もっと読む)
運転支援装置及び運転支援方法
【課題】車両がカーブを通過する際に車両を自動減速させる運転支援装置の安全性を一層向上させる。
【解決手段】道路のカーブの手前で自車両の速度を自動的に減速させる運転支援装置であって、運転支援ECU10は、自車両が通過すべきカーブの条件に基づいて決定した減速量を、自車両情報、外部環境情報に基づいて自車両の走行安全性が高まるように補正して減速させる。これにより、カーブの条件に加えて、自車両情報や外部環境情報を考慮して減速量を決定して減速するので、自車両がスリップ等するのをより確実に防ぐことができ、走行安全性を高めることができる。
(もっと読む)
速度管理および制御のための装置および方法
無線デバイスの現在の地理的位置を決定するために実行可能なロジック、現在の地理的位置に対応する制限速度を決定するために実行可能なロジック、およびその制限速度に基づいてアラートを選択的に生成するために実行可能なロジックを含む、速度管理および制御のための装置、方法、およびコンピュータ読取り可能媒体。 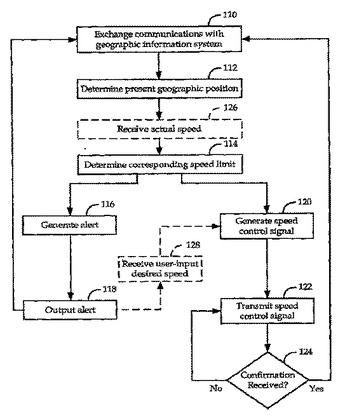 (もっと読む)
(もっと読む)
接触回避システムおよび接触回避装置
【課題】FM電波の送受信機を用いて簡易に構成することができる接触回避システムおよび接触回避装置を提供する。
【解決手段】二輪車に取り付けた送信機から送信される所定周波数のFM電波を、四輪自動車の前方および後方に取り付けた前側FMアンテナ3および後側FMアンテナ4で受信する。受信された電波は、FM受信ユニット2内のダイバシティ受信回路21に接続された制御ユニット23で受信強度の分析が行われ、両アンテナ3,4の受信強度が徐々に強くなりかつ後側FMアンテナ4より前側FMアンテナ3の方が強い場合に、四輪自動車の前方から二輪車が接近中であると判断してスピーカ8から警告を発する。ウィンカスイッチ10が右方向にオンにされ、かつ車速センサ9が所定車速以下を検知した場合にFM電波の分析を開始すると、四輪自動車と二輪車との右直時の接触を効果的に回避できる。
(もっと読む)
車両用白線検出装置
【課題】より正確に白線を検出することが出来る車両用白線検出装置を提供する。
【解決手段】本発明は、走行路上の白線を検出する車両用白線検出装置であって、走行路上を撮像する撮像手段(2)と、この撮像手段により得られた走行路上の画像から白線の候補となる構造物を検出する白線候補構造物検出手段(10)と、撮像手段により得られた走行路上の画像において、白線の候補となる構造物の位置に対して所定の複数の相対位置にそれぞれ所定の構造物が存在するか否かを判定する構造物判定手段(12)と、この構造物判定手段の判定結果に基づいて白線の候補となる構造物が白線であるか否かを判定する白線判定手段(12)と、を有し、所定の複数の相対位置及び所定の構造物は、路上の複数の構造物が有する特有の相対位置関係を基に定められている。
(もっと読む)
車両用走行支援装置
【課題】 走行環境に応じた危険予測を行うことで、より適切な危険警告を行えるようにする。
【解決手段】 制御ユニット1は、カメラ8によって撮影された画像と、判定基準となる基準テンプレート画像との比較を行い、その類似度によって危険を予知する。危険が迫っていると予知したときはそれに応じて警報装置9により警報出力を行う。また、その後の車両操作に応じて基準テンプレート画像の更新を行う。
(もっと読む)
異常検出装置および方法、記録媒体、並びに、プログラム
【課題】人の顔の向きを推定する推定手段の異常を簡単かつ正確に検出できるようにするものである。
【解決手段】信頼度検出部51は、顔向き推定部32によるドライバの顔の特徴の検出結果またはカメラ31により撮影された入力画像の特徴に基づいて、顔向き推定装置12によるドライバの顔向きの推定結果の信頼度を検出する。信頼度の低下が検出された場合、表示制御部53は、表示装置14を制御して、ドライバに診断方向を見させる指示を通知する。異常診断部52は、指示された方向を見た場合に推定されたドライバの顔の向きと実際の顔の向きとを比較することにより、顔向き推定装置12の異常を検出する。本発明は、ドライバの顔の向きに応じて車両を制御する車両制御装置に適用することができる。
(もっと読む)
車両のクルーズコントロール装置
【課題】先行車速度に応じてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】先行車との車間距離を検出する車間距離レーダを備え、検出される先行車との車間距離を維持するように自車速度を制御してクルーズコントロールを行う車速制御手段(ステップ6)と、検出される自車速度が所定の閾値以下に低下した場合にクルーズコントロールを解除するクルーズコントロール解除手段(ステップ3、8)と、算出される先行車速度が所定値より高い条件で前記閾値より低い閾値に切換える閾値切換手段(ステップ7、8)とを備え、例えば先行車が自車の前方に車線変更して来たような場合、減速制御により自車速度の一時的な落ち込みがあっても先行車に追従するクルーズコントロールを継続する構成とした。
(もっと読む)
道路区間線検出装置及び方法並びにプログラム
【課題】ノイズの影響を受け難い態様で、道路区間線を高精度に検出すること。
【解決手段】本発明による道路区画線検出装置は、車両から路面を含む風景を撮像して、周囲画像を取得する撮像手段10と、処理ライン毎に、周囲画像の信号レベルのばらつき度合いを算出し、算出したばらつき度合いに基づいて、各処理ライン上に、道路区間線の特徴点が存在するか否かを判定する判定手段104とを備え、道路区間線の特徴点が存在すると判定された処理ライン上の特徴点に基づいて、道路区間線を検出することを特徴とする。
(もっと読む)
航空機の航行スクリーンの映像を自動的に調節する方法および装置
航空機の航行スクリーンの映像を自動的に調節する方法と装置。この装置(1)は必要であれば、検知した危険な事態を航行スクリーン(2)に提示できる新たな表示形態を自動的に決定する手段(8、9)と、この新たな表示形態を与えることより航行スクリーン(2)の表示の変更を自動的に行なう表示手段(12)とからなる。 (もっと読む)
運転支援装置
【課題】右折に関する支援を適切に行なうことが可能な運転支援装置を提供すること。
【解決手段】自車両が交差点を右折する際に運転支援を行なう運転支援装置1であって、自車両が右折しようとしている交差点の大きさを検出する、交差点サイズ検出手段20と、自車両が右折を開始してから完了するまでの右折完了時間を、交差点の大きさに対応付けて記憶する、右折完了時間記憶手段42と、対向車両が交差点に到達するまでの到達時間を含む対向車両に関する情報を取得する、対向車両情報取得手段10と、交差点サイズ検出手段により検出された交差点の大きさに対応付けられた右折完了時間を、右折完了時間記憶手段から読み出し、読み出した右折完了時間と対向車両情報取得手段により取得された到達時間とに基づいて、自車両の右折に関する右折支援制御を実行する右折支援制御手段40とを備える。
(もっと読む)
自動車用走行制御システム
【課題】 前方車両に追従可能な車両において、信号機の点灯状態を精度良く認識するとともに、その点灯状態に基づく発進停止をスムーズに行なうことを可能とする自動車用走行制御システムを提供することを目的とする。
【解決手段】 自動車用ナビゲーション装置20に記憶される地図情報から、自車両周囲に存在する信号機の存在位置を取得し、取得した信号機位置情報に基づいて自車両の進行方向に存在する信号機のうち、該自車両が次に接近する目標信号機と当該自車両との位置関係を把握するとともに、当該位置関係が予め定められた接近条件を充足した場合に、目標信号機の点灯状態を特定して、その点灯状態の情報を、前方車両に追従するクルーズ走行可能な自車両の走行・停止制御に反映させる。
(もっと読む)
脇見運転防止装置
【課題】後退時に適切に脇見運転を判定して運転者への警報を行うことができる脇見運転防止装置を提供すること。
【解決手段】本発明に係る脇見運転防止装置1は、運転者の顔又は視線の方向が所定の範囲内に第一の期間あれば脇見運転であると判定する脇見運転防止装置であって、
前記所定の範囲を車両の前進時と後退時とで異ならせる範囲変更手段3を有することを特徴とする。
(もっと読む)
車載用ナビゲーション装置及び車両案内方法
【課題】 自車が合流地点へ接近した時、合流地点における本線と合流車線の並走区間距離を考慮した合流地点案内を行い、運転者に合流地点の状況を予測しやすくする。
【解決手段】 自車1が道路2を走行し、走行中道路2と他の道路3との合流地点の所定距離(A1地点)に接近した時、合流地点における本線と合流地点の並走区間距離5が所定の距離以内であるか判定し、並走区間距離5が所定距離以内である場合、合流地点の情報と並走区間距離が短いことから予測される危険についての警告を、拡大案内図9及び音声案内10で行う。走行中道路2と他の道路4との合流地点の所定距離(B1地点)に接近した時、合流地点における本線と合流地点の並走区間距離6が所定の距離以内であるか判定し、並走区間距離6が所定距離以上である場合、合流地点の情報と並走区間距離が長いことから予測される危険についての警告を、拡大案内図11及び音声案内12で行う。
(もっと読む)
車両用走行支援システム,車載機器,および路側機
【課題】より精度よく合流点における車両の合流を円滑に行うことを可能とする車両用走行支援システム,車載機器,および路側機を提供する。
【解決手段】自車両の走行情報および目的地情報を路側機へ送信し、路側機から他の車両の走行情報および目的地情報を受信し、他の車両の走行情報および目的地情報を表示する車載機器と、車載機器から車両の走行情報および目的地情報を受信し、車両の走行情報および目的地情報を車載機器に送信する路側機と、を有することを特徴とする車両用走行支援システムとして提供可能である。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】交差点に接近した際に、車載カメラが撮影した車両前端左右側方の映像を表示する表示装置上の表示位置を制御可能とする。
【解決手段】ナビゲーション装置13にて取得された車両の現在位置周辺の道路地図情報と車両情報収集手段12にて収集された車両の走行状態、操作状況を示す車両情報とを用いて、交差点判別手段15にて交差点への進入の有無を判別し、該判別結果と車両周囲センサ14にて測定された車両周辺の障害物までの距離とを用いて、映像制御手段11にて、ドライバの視線の移動量が少なくなるように、車載カメラ16が撮影した車両前端左右側方の映像の表示装置16上の表示位置を決定し、カメラ映像切替装置17にて、映像制御手段11で決定した該表示位置に映像を表示する位置を設定して表示装置18上に映像を表示させる。
(もっと読む)
2,041 - 2,060 / 2,931
[ Back to top ]