
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
1,981 - 2,000 / 2,931
航行支援装置、及びキャリアセンス方式
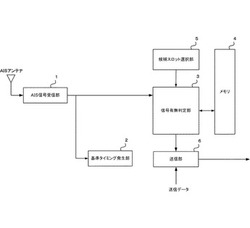
【課題】正確にキャリアセンスを行うことができる方式を提供するとともに、キャリアセンスに要する時間の短縮化を図り、クラスAによる送信とクラスBによる送信との衝突を防止する。
【解決手段】船舶自動識別システム(AIS)に使用される航行支援装置であって、他局と同期したタイムスロットの過去の使用状況に関する情報を記憶するメモリと、前記メモリに記憶された情報と受信したベースバンド信号のIQ平面上における挙動の監視結果とを用いて、前記同期タイミング信号で画定される所定のタイムスロット内に情報信号が存在するか否かを判定する信号有無判定部を備え、前記信号有無判定部の判定に基づいて、自局の情報信号を他局に送信する。なお、受信したベースバンド信号のIQ平面上の挙動監視は、パターン認識を行うことにより実現でき、例えば、部分空間法やサポートベクタマシン、或いはニューラルネットワーク等の手法を用いることができる。
(もっと読む)
運転者状態判定装置および車両の走行安全装置

【課題】運転者の状態を適切かつ高精度に判定すると共に、接触回避動作の実行以後において車両を適切に走行させる。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容の少なくとも何れかを設定し、接触回避動作として自車両の加速制御または減速制御または操向制御を実行する。運転者状態判定部28は、接触回避動作の作動以後の所定時間内に運転者による所定操作量以上の運転操作が入力されたか否かの判定結果に応じて運転者の状態(例えば、運転に適さない状態等)を検知する。
(もっと読む)
車両周辺監視システム、車両、車両周辺監視プログラム、および車両周辺システムの構成方法
【課題】車両周辺に複数の物体がある場合、物体同士の相関関係等を考慮に入れて車両と接触する可能性がある物体の存在を早期に運転者に知らせうるように車両の周辺を監視しうるシステム等を提供する。
【解決手段】本発明の車両周辺監視システム10によれば、一対の赤外線カメラ102により取り込まれた映像に基づいて車両の周辺にある複数の物体の位置が時系列的に測定され、当該測定位置に基づいて各物体の「1次状態」が予測される。また、各物体の1次状態の相関関係に基づいて各物体の2次状態が予測される。そして、2次状態に鑑みて車両1と接触する可能性が高い物体の存在を強調する第2フレームがHUD122に表示される。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】車両の乗員に対して移動体の存在を早期に認知させることのできる画像処理装置及びプログラムを提供する。
【解決手段】車両の後退走行中(S101:YES)、後方の撮影画像を座標変換して鳥瞰画像を生成し(S102)、生成した鳥瞰画像に、その鳥瞰画像よりも前の時点での撮影画像に基づき生成した鳥瞰画像である履歴画像を合成した周辺画像を生成する(S103)。また、車両の周辺に歩行者等の移動体が存在するか否かを判定し(S104)、移動体が存在すると判定した場合には(S104:YES)、移動体の存在を示唆する移動体画像を周辺画像に重畳する(S105)。こうして生成した画像を、表示用画像として出力する(S106)。
(もっと読む)
運転支援装置
【課題】接触回避動作の実行以後での自車両の姿勢状態を適切な状態に設定する。
【解決手段】走行制御部26は、接触判定部25の判定結果に応じて、物体と自車両との接触発生を回避あるいは接触発生時の被害を軽減するようにして自車両の走行状態を制御する走行制御の実行タイミングおよび制御内容(例えば、減速制御時の減速度等)の少なくとも何れかを設定可能である。走行制御部26は、接触回避動作の実行に応じて自車両の姿勢状態が変化した場合には、姿勢戻し制御を実行し、EPSアクチュエータ17による自車両の操舵機構の操向動作によって、自車両の姿勢状態が、例えば接触回避動作の実行開始前後の所定期間内において車両状態センサ16により検出された自車両の姿勢状態に応じた所定の目標状態となるように制御する。
(もっと読む)
車両用路上障害物検出装置、路上障害物検出方法および路上障害物検出装置付き車両
【課題】 レーザレーダの前方注視点距離が遠い場合であっても、障害物の路面からの高さをより正確に計測できる車両用路上障害物検出装置を提供すること。
【解決手段】 車両に設けられ、路面に照射するレーザ光の車両に対する俯角を変化させて、レーザ光を路面に照射する位置と車体との距離である前方注視点距離を可変にするレーザレーダ1と、照射されたレーザ光が障害物に反射した反射波からレーザレーダと障害物との距離を検出し、レーザレーダと障害物との距離と、路面に照射するレーザ光の車両に対する俯角とから、障害物の路面からの高さを演算する第1高さ演算部5fと、レーザ光が照射された障害物の影の長さを検出し、障害物の影の長さと、路面に照射するレーザ光の車両に対する俯角とから、障害物の路面からの高さを演算する第2高さ演算部5gと、障害物の路面からの高さ演算を、第1高さ演算部5fと、第2高さ演算部5gとに切替える切替え部5eとを設けた。
(もっと読む)
運転者管理システム、携帯無線通信端末、サーバ装置、運転者管理方法およびプログラム
【課題】輸送に携わる運転手の仕事中の体調不良を推測可能にした運転者管理システムを提供する。
【解決手段】携帯無線通信端末10とサーバ装置20とがネットワークを介して接続され、携帯無線通信端末10は、運転者の仕事と休憩の基準合計時間である第1の所定時間、停車時間の判定基準となる第2の所定時間、および休憩不足の判定基準となる閾値が格納された記憶部と、位置データを測定する位置検出手段と、時刻データを出力する時計部と、車両の走行開始を示す信号が入力されると、位置データと時刻データとを記憶部に記録する処理を開始し、走行開始から第1の所定時間が経過すると、第2の所定時間以上車両の位置が変化しなかった時間を停車時間として、位置データと時刻データより停車時間の合計を算出し、停車時間の合計の第1の所定時間に対する割合が閾値よりも小さいと、休憩不足である旨の情報をサーバ装置に送信する制御部とを有し、サーバ装置20は、記憶部と、携帯無線通信端末から受信する運転者情報を記憶部に格納する制御部とを有する。
(もっと読む)
駐停車違反抑止システム
【課題】ユーザが道路交通法の定める駐停車禁止区域で駐停車しようとした場合に、より効果的に駐停車違反を抑止する駐停車違反抑止システムを提供する。
【解決手段】標識や信号などの路上施設にRFIDタグを埋め込み、車速が所定の閾値以下になった場合(S110)に車両からタグ内に記憶された標識情報を読み取る(S120)。その中に駐停車禁止情報がある場合(S130:yes)で、且車両が駐停車している場合(S140:yes)には、駐停車違反を行った旨をユーザに報知し(S150)、さらには近くにある駐停車可能区域への表示・音声案内・経路案内を行う(S160)。
(もっと読む)
車載報知装置
【課題】運転者への不快感を緩和する。
【解決手段】すり抜け注意場所を通行する際の走行速度および/または通行回数をメモリに記録させておき(S114)、記憶手段に記録された情報から走行先のすり抜け注意場所を過去に通行した際の通行回数が予め定められた回数以上であると判定(S118でYESと判定)され、かつ、走行先のすり抜け注意場所を過去に通行した際の走行速度が予め定められた速度以上であると判定(S120でYESと判定)された場合には、走行先にすり抜け注意場所があることを報知しないようにする(S122)。
(もっと読む)
車両状況記録装置
【課題】車両の使用の程度と関連した作動機器の作動状況を記録することができる車両状況記録装置を提供する。
【解決手段】第1プリテンショナ機構2cと、該第1プリテンショナ機構2cが作動したことを記録する記録部94及びEEPROM95と、車両Vの積算使用時間を計測する積算使用時間計測部92とを備え、記録部94は、第1プリテンショナ機構2cの作動を該第1プリテンショナ機構2cが作動したときに積算使用時間計測部92によって計測されている車両の積算使用時間と共にEEPROM95に記録する。
(もっと読む)
白線検出装置
【課題】簡単な画像処理で道路の白線を容易に検出できるようにする。
【解決手段】車体前端の左右方向を水平方向の撮像視野、車体幅の内側から車体幅の外側にわたる範囲を各垂直方向の撮像視野として撮像し、各画像に設定した画像認識エリア20L、20Rを水平方向に分割領域LA、LB、・・に分割し、画像上の白線K1、K3の湾曲度合いを吸収するよう分割領域ごとの画素を予め設定したクロスハッチングで示す量だけ垂直にシフトさせてから、水平ラインごとに画素の輝度値の累積値を求め、垂直方向に累積値のピークPを検出する。判定値Nxの垂直ラインを横切る点S1、S2間を線幅Dとして水平に延びる領域を白線候補HL、HRとして抽出し、線幅Dが予め設定した基準幅に最も近い白線候補を白線と決定する。輝度値を水平方向に積算してその累積値のピーク位置を求めるだけで白線の位置を検出でき、画像処理回路が簡単で済む。
(もっと読む)
走行支援装置及び走行支援システム
【課題】運転者にとって違和感の無い車線変更を支援することができる走行支援装置を提供する。
【解決手段】走行支援装置1は、自車3の走行位置を取得する受信器6と、自車3の車速を検出する車速計7と、自車3の加速度を検出する加速度計8と、他車5の走行状態を検出するレーダ9と、車線変更することが可能な車線変更タイミングTCLを求めるコントローラ10と、車線変更を行うときの情報を運転者に提示する表示器11とを備えている。そして、この走行支援装置1は、自車3及び他車5の走行状態に基づいて、将来における自車3と他車5との位置関係データを時系列に算出し、時系列の位置関係データから、自車3の車線変更可能な車線変更タイミングTCLを求め、車線変更タイミングTCLに基づいて、自車3の車線変更を支援する。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】外光が異なった状態で撮像された画像データが混在していても、外光の変化に影響を受けない高品質な周辺画像を生成する駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に設けられたカメラ26から画像データGを取得し、その画像データGから抽出データを生成する。その抽出データを視点変換処理して変換データを生成し、その変換データに撮像位置データ及び方位データを添付して画像メモリ14に格納する。制御部4は、画像処理部15を制御して、各変換データ及び現在画像データを用いて俯瞰画像データを生成し、俯瞰画像をディスプレイ3に表示する。ブレーキランプの光が映り込まれた画像データGが混在していても、画像処理部15はその映り込まれたブレーキランプの光を除く輝度補正をし、ブレーキランプの光が映り込まれていない俯瞰画像データを生成する。
(もっと読む)
車間維持支援装置
【課題】ドライバがアクセルペダル操作中でも、効果的な減速制御を行う。
【解決手段】先行車両との間の車間距離が車間距離しきい値より短くなった時に、アクセルペダル操作が行われていれば、アクセルペダルに反力を加える制御を行って、ドライバにアクセルペダルを離すように促し、アクセルペダル操作が行われていなければ、車両の減速制御を行う。
(もっと読む)
運転支援装置
【課題】探知した情報に基づいて警告する際に、運転者等がより聞き取り易く、携帯音楽機器からの音楽等も聴取可能な運転支援装置を提供する。
【解決手段】自車両の運転を支援するため、探知した情報に基づいて警報音声信号を出力する警報部3と、警報部からの警報音声信号を受信して警報音声を発するスピーカ部4と、警報部から出力された警報音声信号を、運転支援装置1とは別体の車載用音響機器の受信に適合する信号として送信する送信部5と、警報部からの警報音声信号を、スピーカ部又は送信部のいずれに送信するかを選択する送信先選択機能を含む制御部2とを備える運転支援装置1。携帯音楽機器からの音源音声信号を入力するための外部音声入力端子6を備え、警報部からの警報音声信号又は外部音声入力端子からの音源音声信号のいずれを送信部から出力するかを選択する送信音声選択部7を備えることが好ましい。
(もっと読む)
車載用情報提示システム
【課題】運転者に提示すべき要素を推定して、同一のディスプレイに、表示要素を複数のソースから抽出して提示する。
【解決手段】本発明による車載用情報提示システムは、運転状態情報提供部(a)で運転状態に関連する複数の情報を提供する。運転意図情報理解部(b)で前記複数の運転状態情報を加工処理して提示意図を抽出する。ウィンドウ形状・表示位置決定部(c)で前記提示意図に基づいて表示要素のウィンドウ形状表示位置に関するパラメータを決定する。ウィンドウ画像生成・合成部(e)で前記パラメータに従って、複数の映像情報ソース(d)から複数の表示要素を生成する。ディスプレイ(f)は、ウィンドウ画像生成・合成部の出力を表示する。
(もっと読む)
運転支援システム、送信装置及び受信装置
【課題】誤差の発生を最小限に抑えた高精度な運転支援システムを提供する。
【解決手段】 地図画面表示時点における他車両の位置を推定して地図画面の表示を行う。つまり、他車両のナビゲーション装置内での処理にかかった時間や、他車両のナビゲーション装置と自車両のナビゲーション装置との間の通信にかかった時間や、自車両のナビゲーション装置が通信情報を受信してから提示情報を生成する時間等による遅延の影響を解消又は軽減させる。このように遅延の影響が考慮するようになっていれば、報知する他車位置の精度が向上する。
(もっと読む)
画像処理システム
【課題】車両前方の画像データから交通用表示器を精度よく検出することができる画像処理システムを提供すること。
【解決手段】車両の走行方向前方を認識する前方認識装置4と、車両の位置及び姿勢を検出する車両位置検出装置2と、道路地図を格納した地図データベース3と、車両位置検出装置が取得した車両位置に応じて地図データベース3から抽出した走行方向前方の道路形状に基づき交通用表示器の位置を予測する表示器位置予測部7と、前方認識装置が撮影した画像データに、表示器位置予測部が予測した交通用表示器の位置に基づき画像処理領域を決定する画像処理領域演算部8と、画像処理領域演算部が決定した画像処理領域から交通用表示器を検出する交通用表示器検出部9と、を有することを特徴とする画像処理システムを提供する。
(もっと読む)
車載測距装置
【課題】障害物が比較的遠方にあっても、障害物までの距離を精度良く計測することができる車載測距装置を提供する。
【解決手段】自車両の前方の画像を取得する画像取得部と、自車両が走行しているレーンを検出するレーン幅計測部と、自車両前方の障害物を検出する物体検出部と、基準位置でのレーン幅と障害物が検出された位置でのレーン幅を計測するレーン幅計測部と、基準位置でのレーン幅と障害物が検出された位置でのレーン幅を比較し、自車両から障害物までの距離を推定する距離推定部とを備える。
(もっと読む)
駐車支援方法及び駐車支援装置
【課題】外光が異なった状態で撮像された画像データが混在していても、画像処理装置に対する負荷の軽減と品質を落とすことなく短時間で高品質な周辺画像を生成する駐車支援方法及び駐車支援装置を提供する。
【解決手段】車両に設けられたカメラ26から画像データGを取得し、その画像データGから抽出データを生成する。その抽出データを視点変換処理して変換データを生成し、変換データに基づいて俯瞰画像を生成する。このとき。画像処理部15は、その時のランプの点灯状態、路面及び照度に基づいて所定の色補正用テンプレートを選択しその選択してテンプレートを用いて各変換データを輝度補正する。また、画像処理部15は、撮像時の月と時間及び照度に基づいて所定の色補正用テンプレートを選択し選択したテンプレートを用いて各変換データを輝度補正する。
(もっと読む)
1,981 - 2,000 / 2,931
[ Back to top ]