
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
1,921 - 1,940 / 2,931
走行誘導障害物検出装置および車両用制御装置
【課題】自車両の前方に存在する立体物の中から車線分離標やパイロン等の走行誘導障害物を的確に検出することが可能な走行誘導障害物検出装置を提供する。
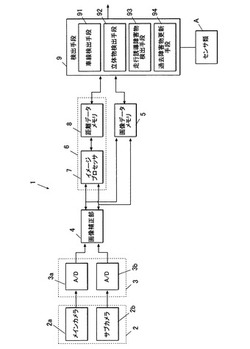
【解決手段】走行誘導障害物検出装置1は、自車両前方の道路を含む風景を撮像して画素ごとに輝度値p1ijを有する一対の画像を出力する撮像手段2と、撮像された一対の画像に基づいて少なくとも一方の画像Tの各画素について実空間における距離Zijを算出する画像処理手段6と、輝度値p1ijおよび距離Zijの情報に基づいて一方の画像Tから立体物Snを検出し、立体物Snの実空間上の大きさを算出する検出手段9とを備え、検出手段9は、立体物Snの実空間上の大きさが予め設定された閾値以内で、かつ一方の画像T中に検出された立体物Snの上下方向の輝度変化が一定のパターンを有する場合にその立体物Snを走行誘導障害物Knとして検出する。
(もっと読む)
視線誘導装置

【課題】運転者の運転操作性の向上を図ることが可能な視線誘導装置を提供する。
【解決手段】視線誘導装置1は、視線誘導箇所決定装置30により、運転者の視線を誘導すべき箇所を決定する。提示装置40は、視線誘導箇所決定装置30により決定された箇所で自車両の移動ベクトルが打ち消されるように、該箇所を含む周辺の領域に光を照射する。ここで、運転時には運転者の視線が或る特定の箇所に向くと運転が安定するという傾向がある。また、人間の視界においてオプティカルフローが停止している箇所に視線が向くという傾向がある。このため、上記の如く光を照射することで、運転者にとっては、該箇所のオプティカルフローが停止しているかのように認識されることとなり、運転が安定する特定の箇所に運転者の視線を向けることが可能となる。
(もっと読む)
携帯端末、接近検知装置、および接近検知システム
【課題】 人と移動体との距離をより精度よく推定することが可能な携帯端末、接近検知装置、およびそれらを用いた接近検知システムを提供する。
【解決手段】 接近検知システム1は、歩行者Hに所持される携帯端末2および車両に搭載される接近検知装置3を備えて構成される。携帯端末2は、車両V1が通過する際における接近検知装置3から発せられた電波の受信レベルの変化勾配比からレベル補正値を求める。そして、求められたレベル補正値を次に接近してくる車両V2に搭載された接近検知装置3に対して送信する。一方、接近検知装置3は、携帯端末2から発せられた電波を受信して上記レベル補正値を検出する。そして、携帯端末2からの電波の受信レベルをレベル補正値により補正し、補正後の受信レベルに基づいて携帯端末2を所持する歩行者Hの方向および歩行者Hとの距離を推定する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の画像から該車両との接触を回避すべき対象となる歩行者等の対象物を迅速に判定して、運転者への情報提示や車両挙動の制御を行うことができる車両周辺監視装置を提供する。
【解決手段】撮像手段2R,2Lを介して取得した画像から、車両10の周辺に存在する対象物を抽出する対象物抽出手段11と、抽出された対象物のうちから歩行者を抽出する歩行者抽出手段12と、抽出された歩行者の姿勢を判別する姿勢判別手段13と、少なくとも姿勢判別手段13により判別された歩行者の姿勢に関する第1判定処理を含む判定アルゴリズムを実行することにより、抽出された対象物が車両10との接触を回避すべき回避対象であるか否かを判定する回避対象判定手段14と、少なくとも回避対象判定手段14の判定結果に応じて、車両10の機器を制御する車両機器制御手段15とを備える。
(もっと読む)
無線通信方法ならびに路側機および車両
【課題】路車間通信と車車間通信を適切に切り替える技術を提供する。
【解決手段】路車間通信モードと車車間通信モードとを周期的に切り替えて、路車間および車車間の通信を時分割で行う無線通信システムにおいて、路側機が該路側機の存在を車両に通知する存在通知を路車間通信に割り当てられる時間以下の間隔で送信する。路側機から存在通知を受信することで路側機の通信範囲内への進入を検知した車両は、路側機から同期信号を受信するまで、路車間通信モードを継続する。このような方法により、車両が路側機の通信可能範囲への進入を即座に検知できるとともに、路車間での同期制御を確実に行うことが可能となる。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、障害物(静止物体)が検知された時点で算出された、該障害物の進行路中心線からのずれ量に基づいて、該障害物の自車両に対する相対移動位置を推定する場合に、その相対移動位置を正確に推定できるようにする。
【解決手段】レーダ装置1により障害物が検知された時点で算出された上記ずれ量を、該障害物の自車両に対する相対移動位置を推定する際に、該障害物が検知されてから所定時間経過した時点で検出された旋回半径に基づいて補正する。
(もっと読む)
駐車支援システム
【課題】 車両を駐車可能な道路に駐車したときに駐車余地以上のスペースが確保できるかを判断し、駐車できると判断したときは当該駐車可能な道路を案内するシステムを提供する。
【解決手段】 車両の車幅に関する車幅データと、駐車可能な道路に関連付けられた道路の幅員に関する幅員データと、前記駐車可能な道路に関連付けられた駐車余地に関する駐車余地データと、を記憶する記憶手段と、前記駐車可能な道路を検索する検索手段と、検索された前記駐車可能な道路に前記車両を駐車したとき、前記車両の右側にできる道路幅を演算する演算手段と、前記演算手段で演算された前記道路幅と前記駐車余地とを比較して、案内を出力する出力手段と、を備える、駐車支援システムである。
(もっと読む)
車両用運転技量判定装置
【課題】ドライバの運転技量を正確に且つ簡易に判定することができる車両用運転技量判定装置を提供する。
【解決手段】本発明の車両運転技量判定装置1,70は、運転技量判定を実施する運転技量判定地域を道路地図上に予め記憶する技量判定地域記憶手段10,78と、車両の走行位置を検出する走行位置検出手段32と、車両の走行位置が運転技量判定地域にあるときドライバの運転技量を運転技量判定基準値10,80に基づいて判定する運転技量判定手段20,72と、を有する。
(もっと読む)
携帯用電子機器及び車載用電子機器
【課題】交通事故に遭遇する危険性が高い状況のときに歩行者に対してその危険を報知するようにして、歩行者の交通事故を少なくする。
【解決手段】本発明の携帯用電子機器1は、歩道と車道の分離帯の構造に応じて車道と歩道の安全度を決定した安全地図データ10を記憶する記憶手段4を備え、現在位置を検知する位置検知手段3を備え、検知された現在位置の安全度を前記安全地図データ10に基づいて判定する判定手段2を備え、判定された安全度が設定された安全度よりも低い場合に、危険報知を行う報知手段7、8、9を備えて構成されている。この構成の場合、交通事故に遭遇する危険性が高い状況、即ち、安全度が低い場合に、歩行者に対してその危険を報知できる。
(もっと読む)
案内システム
【課題】 広幅な交差点を右折しようとする運転者に対して、右折後に停止すべき交差点なのかを案内するシステムを提供することを課題とする。
【解決手段】 広幅な交差点であって、右折後に停止線が存在する第1の特定交差点及び右折後に停止線の存在しない第2の特定交差点の位置情報を含む地図データと、前記第1の特定交差点に関する第1の案内データと、前記第2の特定交差点に関する第2の案内データとを記憶する記憶手段と、車両が前記第1の特定交差点を右折しようとするとき前記第1の案内データの内容を案内し、前記車両が前記第2の特定交差点を右折しようとするとき前記第2の案内データの内容を案内する案内手段と、を備えることを特徴とする案内システムである。
(もっと読む)
運転支援装置
【課題】並走車の走行する車線へと車線変更すると予測された場合に車両操作の支援を行うことによって、より適切な状況で並走車との接触を防止する車両操作の支援が可能となった運転支援装置を提供する。
【解決手段】自車両と並走する並走車両が検出された場合に、自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し、検出された状況が予め定められたいずれかのパターンに該当した場合に、自車両が並走車両の走行する車線へと車線変更するか、若しくは並走車両が自車両の走行する車線へと車線変更すると予測し、自車両に対して接触を防止する案内やアクセル開度及びブレーキあそび量に関する車両制御を行うように構成する。
(もっと読む)
走行制御装置および方法、プログラム、並びに記録媒体
【課題】運転中の危険な状況をより正確に検出して安全に走行させることができるようにする。
【解決手段】運転者状態センサ121を構成する画像センサ、音声センサなどのセンサ情報は、運転者状態解析部124により解析され、運転者状態情報が生成される。運転操作部122を介した運転者による操作に関する情報が運転操作解析部123に供給され、運転操作情報が生成される。走行センサ123により取得された自動車の周囲の物体に関する周囲状態情報が生成され、危険判定部126により衝突の可能性の有無などが判定される。安全性判定部128は、運転者状態情報、運転操作情報、および危険判定部126の判定結果に基づいて、自動車を安全に走行させることが可能か否かを判定し、安全に走行させることが可能ではないと判定された場合、走行制約部129を制御して、危険を回避するような運転を強制的に行うように、運転制御部130を制御する。
(もっと読む)
車両用運転支援装置
【課題】表示装置の画面で目標走行経路と実際の前方の走行予定コースを重畳して表示し両方の関係の認知を容易化し、運転者の経験に基づく予測操舵入力を不要とし、運転者に操作簡単な操縦方法を与えられる車両用運転支援装置を提供する。
【解決手段】車両用運転支援装置10は、表示部位13Aに車両1の走行情報を表示するヘッドアップ・ディスプレイ装置14と、車両の走行に適した目標走行経路の情報を作成する経路誘導設定部76と、車両状態検出部40から出力される挙動信号に基づいて車両の予測走行軌跡の情報を作成する予測走行軌跡算定部73と、目標走行経路を目標走行可能領域111として表示画面に表示する第1の表示制御手段(74)と、予測走行軌跡112を表示画面に表示する第2の表示制御手段(74)とを備える。
(もっと読む)
車両の運転支援装置
【課題】現在の車両挙動のみならず、今後予想される車両挙動をも考慮して車両の加減速度を適切に抑制し、先行車追従に際して円滑で違和感のない快適な制御を可能とする。
【解決手段】追従走行制御の追従加減速制御において、演算した目標加減速度aを、自車速V0と自車両1に対する先行車の相対位置とに基づき自車両1が先行車に追従するのに必要な目標ヨーレートγt(高速時)に応じて設定する制限値Lm、或いは、自車両1に対する先行車の相対位置に基づき自車両1が先行車に追従するのに必要な目標ステアリング角St(低速時)に応じて設定する制限値Lmで制限する。
(もっと読む)
地物情報出力装置
【課題】地物の配置及び形態を詳細に示す地物情報を出力することができるとともに、そのような地物情報を出力するために情報格納手段に格納することが必要とされるデータ量を小さく抑えることができる地物情報出力装置及び地物情報出力方法を提供する。
【解決手段】地物形態情報Faを地物種別毎に格納した地物形態情報格納手段DB1と、各地物の地物種別情報Fbと各地物の地物配置情報Fcとを格納した地物配置情報格納手段DB2と、指定位置近傍の地物の地物種別情報Fb及び地物配置情報Fcを地物配置情報格納手段DB2から取得するとともに、取得された地物種別情報Fbに従って当該地物種別の地物形態情報Faを地物形態情報格納手段DB1から取得し、これらの地物配置情報Fc及び地物形態情報Faに基づいて、指定位置近傍の地物の道路面上における配置及び形態を示す地物情報Fを生成して出力する地物情報生成手段3と、を備える。
(もっと読む)
位置計測装置、方法及びプログラム、並びに移動量検出装置、方法及びプログラム
【課題】計算コストをかけることなく、複数の画像から対象物の相対位置を正確に計測する。
【解決手段】撮像部11は、視点1、視点2、視点3で車両前方を撮像して、それぞれの位置において車両前方画像を生成する。縦エッジ線検出部12は、各画像から縦エッジ線を検出し、各縦エッジ線のX座標を表す水平位置uを検出する。対応縦エッジ線決定部13は、縦エッジ線検出部12で検出された視点1〜3における各車両前方画像間で対応する縦エッジ線を決定する。位置関係計算部16は、対応縦エッジ線決定部13で決定された対応する縦エッジ線についての水平位置ui、a、焦点距離fに基づいて、視点3に対する縦エッジ線piの位置を計算する。
(もっと読む)
運転支援装置
【課題】 運転支援装置の車外への持ち出しをより確実に検知することが可能な運転支援装置を提供すること。
【解決手段】 運転支援装置Aにおいて、制御手段5は、走路履歴と電源遮断時の車両位置とを記録し、電源スイッチ(IGNスイッチ)10のオンなる入力に基づいて、電源供給時の車両位置と前記電源遮断時の車両位置とが一致するか否かを判定し、前記電源供給時の車両位置と前記電源遮断時の車両位置とが一致すると判定される場合に、さらに現在の車両位置が前記走路履歴に記録された走路上に位置するか否かを判定し、前記電源供給時の車両位置と前記電源遮断時の車両位置とが一致しないと判定される場合、あるいは、前記現在の車両位置が前記走路上に位置しないと判定される場合に、盗難対応動作として報知手段6の動作の少なくとも一部を規制する、または、車外への持ち出しがあったことを外部に報知してなる。
(もっと読む)
車両用運転操作補助装置
【課題】運転者の操作を将来の走行環境に応じて適切にアシストできるような車両用運転操作補助装置を提供する。
【解決手段】レーザレーダ10,前方カメラ20,後側方カメラ21および車速センサ30によって、車両状態および車両周囲の走行環境を検出する。コントローラ20は、検出された車両状態、走行環境から、車両もしくは車両周囲の走行環境の将来を予測し、将来において必要な運転操作量、例えば操舵反力を推定する。操舵反力制御装置60は、必要な操舵反力となるようにサーボモータ61を制御し、運転者の操作を補助する。
(もっと読む)
対象物検出装置、方法及びプログラム
【課題】画像に高輝度が含まれる場合でも、その画像に基づいて高精度に対象物を検出する。
【解決手段】対象物検出装置は、入力画像からウインドウ画像を抽出するウインドウ画像抽出部1と、閾値を超えないようにウインドウ画像の輝度値を補正する輝度補正部2と、学習モデルを記憶する学習モデルデータベース3と、補正されたウインドウと学習モデルとに基づいて対象物を検出する評価部4と、対象物の検出結果を出力する出力部5と、を備えている。
(もっと読む)
車間維持支援装置および車間維持支援方法
【課題】アクセルペダル反力の付与による運転者へ注意喚起を確実なものとする。
【解決手段】車間距離がしきい値より短くなった時などに、アクセルに操作反力を与えてドライバに注意を喚起するため、アクセル操作量と駆動トルクとの関係を、アクセル操作反力をドライバが認識し易くなるように駆動トルクが減少もしくは零になるように補正し、通常の対応関係とは異なる対応関係へと変更する。
(もっと読む)
1,921 - 1,940 / 2,931
[ Back to top ]